非煤矿山井下铲运机无人驾驶控制系统的研究
2023-01-26田明鑫
田明鑫
(北方铜业铜矿峪矿电控部,山西 垣曲 043700)
引言
铲运机是一种铲运一体化的机械,在工作时主要依靠人工操作控制液压铲斗的动作,满足物料运输需求,由于在工作过程中需要同时兼顾运动、铲斗动作、转运等,工作流程多、动作复杂,人工操作时注意力需要高度集中,极易产生疲惫,而且井下环境复杂,给铲运机的运行和工作效率带来了较大的影响,因此迫切需要开发一种新的控制系统,以降低人工操作难度和对人工操作的依赖,提高铲运机在各种工况下运行的稳定性和可靠性[1]。
结合无人控制技术和视频监控技术的发展,本文提出了一种新的铲运机无人驾驶控制系统,通过激光雷达、高清视频监控模式实现对铲运机周围工作状态的实时检查,通过车载控制模块实现对周围环境和铲运机动作流程的分析,初步实现了铲运机在工作时的无人驾驶控制。根据实际应用表明,新控制系统的调控精度达到了±0.1 m,反应速度约为0.2 s,极大地提升了铲运机的运行可靠性。
1 铲运机无人驾驶系统
铲运机无人驾驶的核心是铲运机能够自主地感知周围环境,并对周围环境状态进行自主识别和判断,自主进行路径规划和工作状态调整。在对多种控制方案进行研究后,本文提出了一种新的铲运机无人驾驶系统,其整体结构如图1 所示[2]。
由图1 可知,为了满足无人驾驶的控制需求,在铲运机上增加了多种传感器和中控系统,在工作时利用前后侧的激光扫描仪和摄像头对铲运机周围的工作环境进行检查,将环境信息传递到中控箱内,数据在中控箱内完成分析并确定对铲运机的调节需求,输出调节控制信息,控制铲运机的行驶系统和铲运机构进行工作,满足无人驾驶控制需求。同时为了提高对铲运机工作状态的监测,在铲运机上还设置了车载无线通信系统,能够将铲运机的运行信息实时传递到监控中心,监控中心人员也能够通过无线数据传输系统进行远程控制,确保铲运机在紧急情况下人工远程控制的需求。

图1 铲运机无人驾驶控制系统示意图
2 各控制模块分析
铲运机无人驾驶控制系统主要包括车载控制模块、环境状态感知模块、状态监测模块及无线数据信息模块四个部分,各个模块协同作业,共同确保了铲运机无人控制系统的运行稳定性和可靠性。具体介绍如下:
1)车载控制模块。该模块是整个无人驾驶控制系统的核心,对数据处理要求极高,因此采用了高性能的嵌入式控制系统[3],在工作时首先获取各类传感器的数据信息,对各种指令和传感器监测数据进行分析后,由控制系统输出相应的控制量。控制量作用于铲运机的液压控制系统和驱动系统,实现对铲运机运行状态的灵活调整。车载控制模块还能够将铲运机的状态信息通过无线数据通信系统传输给监控平台,满足远程监测的需求,同时该模块能够对地面监控中心的数据指令进行解析,实现远程调控。
2)环境状态感知模块。环境感知模块是该无人驾驶控制系统的“眼睛”,主要用于对铲运机周围的环境进行监测,为铲运机路径规划的动作执行提供依据。为了满足不同工况下环境感知可靠性的需求,在铲运机的前后设置了激光雷达+高清视频摄像装置,高清摄像装置还具有夜视功能,满足在暗夜环境下的环境监测需求[4]。激光雷达对环境的感知,主要是通过利用激光束进行测距来实现的,在激光雷达中包括了一个激光发射装置和一个激光接收装置,通过发射装置发出激光束,激光束在遇到障碍物后会进行反射,激光接收装置接收到被反射回来的激光束后对激光信息进行解读,进而测算出障碍物的距离。激光雷达监测具有受环境影响小、测量精度高、稳定性好的优点[5]。铲运机环境感知模块安装结构如图2 所示。
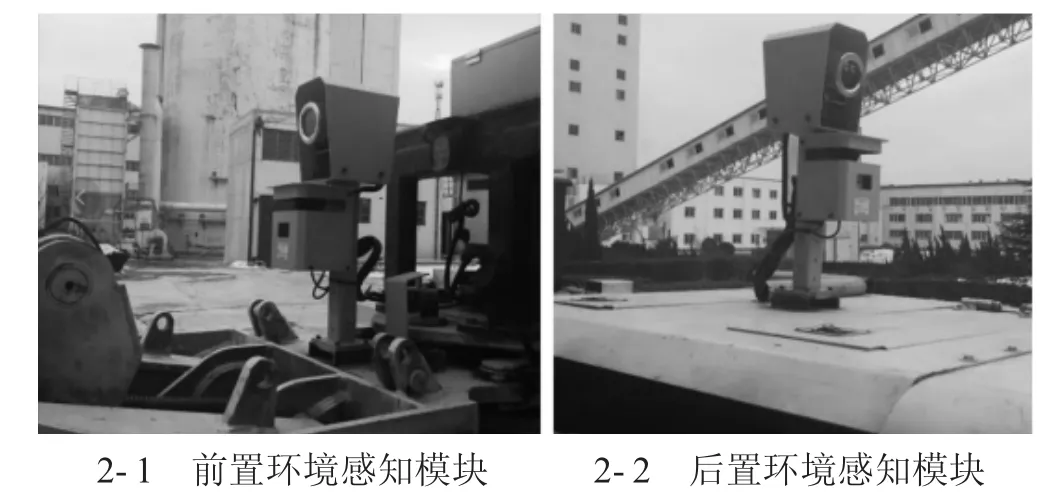
图2 环境感知模块安装结构示意图
4)状态监测模块。状态监测模块主要包括各类角度传感器、速度传感器、温度传感器等,主要是对铲运机的运行状态进行实时监测,一方面对车载控制模块发出调控信息后的执行情况进行反馈,另一方面对铲运机的工作状态进行监测,出现故障后及时报警和定位,提高铲运机在运行中的稳定性和可靠性。角度传感器主要安装在铲运机铲斗液压油缸处,速度传感器主要安装在铲运机的驱动轴上,温度传感器主要安装在铲运机的驱动电机位置,各类传感器的安装如图3所示。
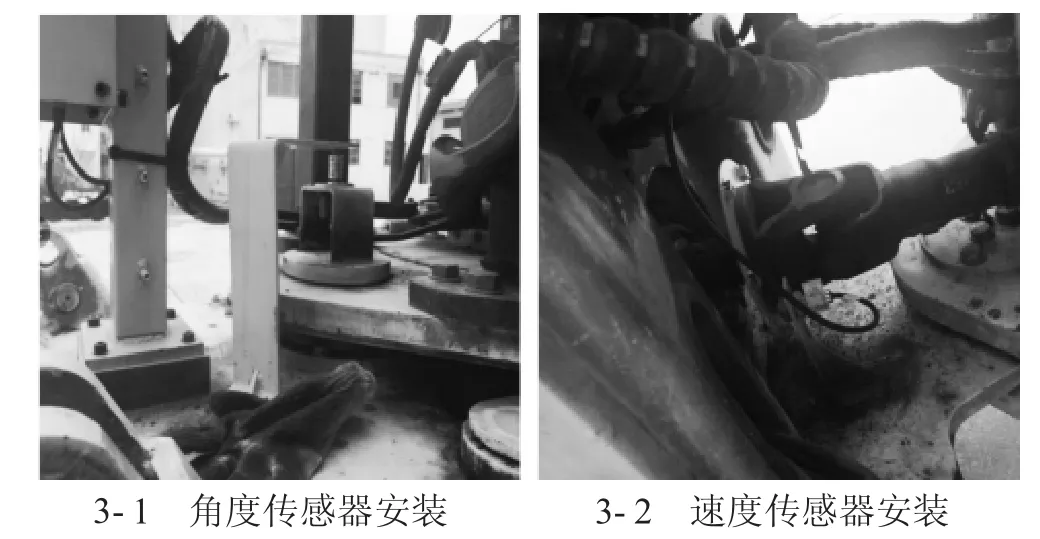
图3 状态监测模块安装结构示意图
5)网络通信模块。为了满足铲运机运动过程中通信可靠性的需求,网络通信方面,本文选择了一种新的无线数据传输系统,在铲运机和其工作环境周围设置了无线基站,使无线数据能够覆盖整个铲运机的工作场所,确保数据通信的效率和准确性。
3 自主控制路径规划
由于井下环境复杂,为了满足铲运机在不同工况下主控制的需求,在对多种控制方案进行分析后,最终确定了一种基于模糊PID 的自主控制路径规划方案,在系统内增加了一个权重输出器。参考人工驾驶需求,当铲运机在中央行驶时,此时会考虑到各类偏差对行车安全的影响,而当铲运机偏离正常道路的距离不大时,系统则考虑偏离角对运行安全的影响。因此按照以上逻辑处理规则来对铲运机的运行路径进行规划,提高规划效率和安全性。
4 应用情况分析
目前该无人驾驶控制系统已经在铲运机上投入应用,以UL70 铲运机为例,在运行过程中的路径控制精度达到了±0.1 m,从下达调控指令,到系统作出反应的时间间隔约为0.2 s,完全满足了自主运行控制稳定性和可靠性的需求。其无人驾驶控制界面如图4所示。

图4 铲运机无人驾驶控制界面示意图
5 结论
1)铲运机无人驾驶控制系统主要包括车载控制模块、环境状态感知模块、状态监测模块及无线数据信息模块四个部分。
2)车载控制模块,采用了高性能的嵌入式控制系统,对数据处理速度快、准确性高;环境感知模块,采用了激光雷达+高清视频摄像装置,满足在不同环境下的环境监测需求;状态监测模块通过利用各类传感器对铲运机的运行状态进行监测;网络通信模块,通过无线数据传输方案,满足数据传输需求。
3)新控制系统的调控精度达到了±0.1 m,反应速度约为0.2 s,满足无人驾驶控制的控制精确性要求。