农机深松作业智能监测系统车载终端设计
2023-01-22吴瑞聪
吴瑞聪
(临汾职业技术学院,山西 临汾 041000)
实施农机作业智能化监控,为农机作业补贴政策的实施提供了强有力的技术支持,为各级政府提供了补贴和结算的定量资料,确保了政府对农机补贴的直接投入,提高了农业的整体生产能力。同时,也可以推动农机装备行业的转型升级,刺激农机智能监测设备企业研发生产更多智能化信息化设备,更好地服务于农业生产。通过对农机作业状态、作业面积、作业质量的监测,极大地降低了农机作业调度和统计工作的难度,减轻了农机作业的管理压力。
1 深松和秸秆还田的技术条件
玉米秸秆机械化收割后,将秸秆直接粉碎还田,碾压深度为5 cm~10 cm,并在地面上均匀撒播。若收割玉米秸秆,应使用灭茬器在10 cm~12 cm深度的范围内进行灭茬。
深翻深度为25 cm~30 cm,扣垡紧密,不留沟槽;翻土后,地面平整、破碎,10 m以内的高度偏差不大于10 cm,表面残茬不大于10%。
深松的原则是要打破耕层,耕层厚度不得小于30 cm,每一行的深度偏差不得超过2 cm。在播种过程中,秸秆不拖沓、深浅均匀、不轻不漏,保证地表平整、土壤细碎,达到“上实下虚”的“待播状态”[1]。
智能化监控技术的实现,需要将农机作业信息、卫星定位信息、作业状态信息等,由农机作业智能监控终端进行分析;通过计算、分析作业质量,统计面积,储存资料,精确监控机械作业状况和作业面积。
2 农机深松作业智能监测系统车载终端的关键技术
2.1 物联网技术
物联网出现于20世纪90年代,迄今为止,经过约30年的发展,其已经成为现代信息技术的一个重要部分。物联网是利用多种通信技术将不同的应用对象形成一个网络,通过不同的应用对象进行信息交流,使其能够在各种情况下进行不同的应用,从而实现智能识别与控制等功能。物联网是以互联网、对象信息采集、通信技术等为基础发展起来的。通过物联网技术,可以真正做到万物互联[2]。通过对物联网的通信目标和过程的分析,可以归纳为信息感知、安全传输等特点。
传感器技术是信息感知的重要组成部分,利用射频识别技术、二维码技术以及大量的智能感应器等实现多种形式的信息采集,再利用现代通信技术,对所采集的目标信息进行安全、可靠的传输[3]。通过与互联网、无线网络等通信网络的结合,物联网能够准确、高速地传输所感知到的数据信息。智能化处理是利用大数据、云计算等多种智能技术对数据进行分析、处理,并给出智能分析的方法,从而实现智能监控。
在现实生活中,物联网具有明显的层次结构。一是位于最下层的数据感知层,它的主要功能是通过多种信息收集装置对外部目标进行识别,并获取目标的基本信息。二是位于中间的网络传输层,它的主要任务是对数据感知层中的目标进行识别和收集,并通过通信网络进行安全、有效地传送[4]。三是物联网应用决策层,其主要任务是对数据感知层中的信息进行及时的处理,对其进行科学的管理,并在必要时对其进行调用,以达到对目标对象的实时控制与智能管理。基于物联网的特点,结合典型的系统结构,对深松作业进行了智能化监控。该系统通过感知层上的感测装置,获得农机深松作业的相关信息,然后由网络层将采集到的资料安全、有效地传送,最终在应用层进行作业区域的处理。
2.2 GPS导航技术
GNSS技术是一种利用GNSS卫星进行解算而获得坐标系统中绝对定位坐标的一种技术,它能为使用者在地表或近地空间中的任意位置提供全天候的三维坐标和速度信息,导航系统的基本原理就是利用测距原理来确定方位点的坐标。在农机具上装载车载终端进行深松作业的时候,人造卫星不断地向农机具发射信号,每次发射都有一段发射时间[5],农用机械设备在收到信号后又会有一段接收时间。发射时间与接收时间的差值即为信号在发射时所耗费的时间,卫星在整个发射过程中的传播速率为s,利用两个时差与卫星信号的传播速率之积来确定农机与卫星的距离。假定农田上的农业机械的坐标是(x,y,z),理论上,只需要三个卫星组成3个方程式,就可以得到3个坐标,但由于信号在实际传输的时候会通过电离层造成延迟,所以实际的距离要小于光速与时差的乘积。因此,在进行农业机械的空间坐标计算时,必须考虑到“钟差”。因此,需要四颗卫星,才能得到真正的卫星位置。这是一种常见的定位方法,即伪距离定位。假定在农机作业中,4个卫星的空间坐标是(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)、(x4,y4,z4),四颗卫星与农机的间距分别用a、b、c、d来表示。因此,可以用以下方式来表达伪距位置方程式:

上面的公式中a、b、c、d是被测得的伪距离,t是在传输过程中的时间差,四个卫星的位置都是已知的,通过解此方程,即可得到农业机械的三维空间坐标。
全球主要的导航与定位系统是北斗BDS、美国GPS、俄罗斯 GLONASS、欧盟 GALILEO等。GPS(Global Positioning System)是目前应用最广的一种,GPS使用24个网络卫星和4个备用卫星,它的覆盖范围达到98%,能够为全世界的使用者提供24 h的准确地理位置、行驶速度和准确的时间信息[6]。北斗导航系统是我国自主研制的一种导航系统,北斗三号卫星导航系统于2020年正式投入使用,标志着我国北斗系统的全面成熟,其定位精度也得到了极大地提高,在与基站的差动定位中实现了毫米级的精确定位[7]。由于北斗导航已在国内及周围区域广泛应用,农业深松作业监控系统采用了GPS和北斗两种模式的定位模块。
2.3 无线通信技术
无线通信是一种利用电磁信号在自由空间中的传播特征来实现信息交流的方法,它以其独特的优势在各行各业中得到了广泛的应用,该通信技术不依赖于工业环境,无需现场布线,具有很高的灵活性。按照距离的不同,可以将其分成两种类型,其中最常用的是ZigBee、Bluetooth、Wi-Fi、UWB(NFC)等。由于该监控系统是在农田进行农业生产,必须将资料上传至服务器,因此必须使用远程无线技术。
长距离的无线通信方式也是五花八门,比较常用的有数传电台、GPRS等。本文从传输距离、传输安全性、应用领域等几个方面对传输技术进行了分析,并对其传输技术进行了研究。最后,从通信距离、通信方式、数据传输安全性、模块费用等几个方面综合考虑,采用GPRS无线传输技术。GPRS(GSM)是中国移动公司在GSM网络上运行的一项技术,这种方法是通过分组交换来实现的,即把要传输的数据分成若干个单独的分组,将包裹编号的资料包,按照之前的顺序,依次传送。本文之所以选择 GPRS技术,主要理由如下:
1)覆盖范围广泛。近年来,由于手机网络的迅速发展,几乎覆盖了国内大部分地区,任何手机信号都能连接到手机上。
2)即时联机。GPRS网络启动后,所有的服务都将继续运行。由于不占用通道, GPRS会在缺省状态下永远处于联机状态,不会占用任何路由。
3)按数量计价。GPRS网络是按收发的字节数收费,只有在有数据交互的情况下,才会占用带宽,有效地提高了网络的使用效率。
4)传送速率。GPRS采用GSM通信,采用包交换技术,使GPRS的传输速率比GSM快。最大的传输速度是171.2 Kb/s。实际使用时,通常为56 Kb/s~1 142 Kb/s,能很好地满足系统的设计要求。
3 系统整体结构
在对该系统功能要求进行分析的基础上,将物联网技术和无线通信技术相结合,给出了能在恶劣工作条件下进行农业机械深松作业监控系统的总体设计方案,并给出了各模块的主要功能。该系统由三大模块组成:服务器、车载终端和监控终端[8]。服务器、车载终端和监控终端的主要功能如下。
3.1 服务器
服务器的功能是对多台作业车终端进行统一的管理,将终端的数据传输到PC和手机上。在监控系统中,服务器是应用层,仅需与车载终端通信即可。结合深松作业流程,服务器的主要工作是对车载终端进行角度和非工作角度、图像采集等指令的发布。同时,当服务器接收到了来自车载终端的工作轨道坐标信息后,需要进行数据运算,并将其发送给终端,并通过车载终端将获取的现场图像数据进行解压,从而实现实时显示。
3.2 车载终端
作为整个系统的中枢,车载终端的功能是采集、存储和上传农业机械设备的数据,同时实现了服务器、车载终端和监测终端的数据交互。车载终端首先对农用机械的经纬数据进行初步的坐标解析和时间解析。其次,将监控终端采集到的数据进行集成和封装,并以特定的格式进行备份。最终,将所封装的资料以无线方式传送至伺服器。
3.3 监控终端
监控终端由角度信息采集、图像采集和身份识别三部分组成。角度信息采集模块主要是对农机作业状况的判定和对耕地深度的测定;图像信息采集模块是对牵引车和耕作状态进行实时监控,能够拍摄到拖拉机深松的全过程;该系统的功能是将各种犁体的基本资料和工作角度等信息进行存储。
通过服务器、车载终端和监控终端的数据交互,可以实时地获取和监控农机深松作业中的作业信息,并通过故障自诊断、断点续发等措施,有效地防止了无效率操作。定位监测系统的整体结构,如图1所示。
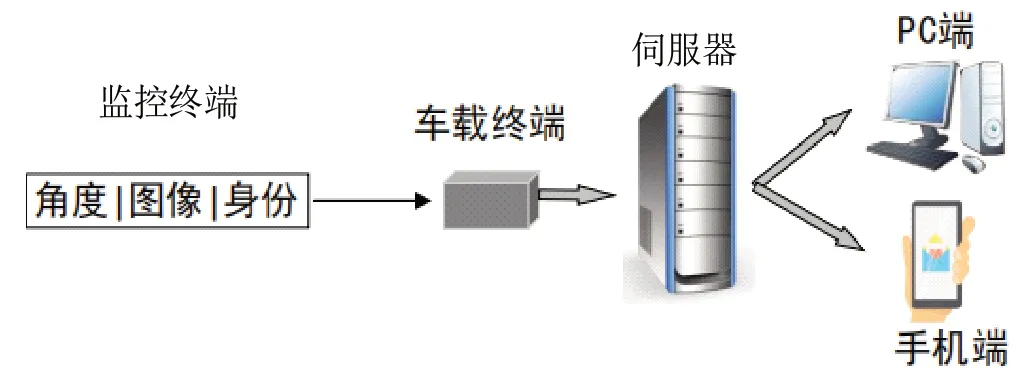
图1 定位监测系统的整体结构
4 小结
本文在农业智能化农业云平台的基础上,首先,对深松作业监控系统的功能进行了调查;其次,对其功能要求进行了分析,并结合物联网、GPS、无线通信等关键技术进行了深入探讨;最后,根据农机深松作业过程中的工作流程,给出了一套智能化的农机深松监控系统,为智能农机的发展贡献了一份力量。
