C波段多普勒天气雷达定标原理分析
2023-01-18任慧芳李林蔚王志伟
刘 方,任慧芳,李林蔚,刘 斌,王志伟,叶 飞
(1.内蒙古大气探测技术保障中心,呼和浩特 010051;2.土默特左旗气象局,呼和浩特 010105;3.湖南省气象技术装备中心,长沙 410000)
0 引言
截至目前,内蒙古自治区共有10部C波段多普勒天气雷达。为保证雷达的正常运行,省级技术人员会在汛期前后开展两次维护工作,对雷达不同系统的参数进行测量,调整参数至正常状态,以保证雷达的正常运行。雷达系统的整体性能由发射系统和接收系统决定,因此文章将对C波段多普勒天气雷达发射系统、接收系统的定标原理与方法进行分析和讨论。
1 发射系统
1.1 发射脉冲包络
发射脉冲包络测试内容包括:包络宽度τ、上升时间τr、下降时间τf以及顶降δ。图1为发射脉冲包络示意图,脉冲包络的最大幅度为Umax,脉冲包络的平顶为Um,从脉冲包络前沿0.7Um到脉冲包络后沿0.7Um为包络宽度τ;脉冲包络前沿0.1Um到0.9Um为上升时间τr;脉冲包络后沿0.9Um到0.1Um为下降时间τf;顶降δ可由公式(1)计算得到:
(1)
发射脉冲包络采用机外仪表测试。图2为发射脉冲包络测试框图,发射信号通过雷达馈线中的定向耦合器耦合输出,并通过测试电缆、衰减器接入检波器和示波器,设置示波器显示完整包络形状,读取发射脉冲包络的各种参数。对于不同脉宽、不同重复频率应分别测量。需要注意的是在切换不同脉冲宽度时首先要关闭发射机高压,然后进行脉冲切换,否则容易造成发射机损坏。
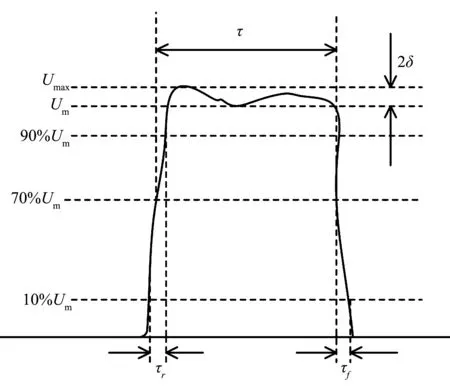
图1 发射脉冲包络示意图

图2 发射脉冲包络测试框图
1.2 发射机峰值功率
雷达的最大探测距离Rmax可由公式(2)计算得到,雷达方程在接收机性能固定的情况下雷达发射信号的峰值功率决定了雷达的最大探测距离,所有在对雷达发射系统定标时要对发射机峰值功率进行检测。

(2)
式中,Pt为雷达发射信号峰值功率;G为天线增益;Ae为天线有效接收面积;δ为目标物等效后向散射面积;Smin为接收机最小可测信号。
发射机峰值功率,采用机外仪表测试法和机内自动测试法。通过雷达馈线中的定向耦合器将发射信号耦合输出,并通过测试电缆、衰减器接入机外(或机内)功率计,设置功率计即可显示发射脉冲的峰值功率,C波段多普勒天气雷达要求峰值发射功率不小于250 kW。对于不同脉宽,不同重复频率应分别测量。使用机外仪表测试时需要注意的是测试之前要对功率计进行校零,校零之后重新设置功率计的工作频率、偏移量(Oset)以及占空比(Dt)。
Oset=Lc+L1+L2+d
(3)
式中,Lc为发射机耦合器的耦合度,可从耦合器铭牌上查询;L1为固定衰减器的衰减值;L2为测试电缆损耗;d为其他损耗,可根据实际情况确定。
(4)
式中,τ为发射脉冲宽度;F为脉冲重复频率。
1.3 极限改善因子
新一代天气雷达采用脉冲多普勒体制,系统的相干性直接影响了雷达对回波信号谱参数的估计和系统的地物对消能力。雷达系统的相干性指雷达系统内各信号的频率是稳定的,信号的初相位是相同的,或相互之间存在固定的关系。雷达的相干性指标可用极限改善因子来反映,极限改善因子分为发射机输入极限改善因子和输出极限改善因子两项测试内容,参照普来赛西门子雷达公司提供的测试方法,用频谱仪检测信号功率谱密度分布[2]。极限改善因子的计算方法如公式(5):

(5)

极限改善因子采用机外仪表测试方法。通过雷达馈线中的定向耦合器将发射信号耦合输出,并通过测试电缆、衰减器接入频谱仪,设置频谱仪测量发射及输出信号的信噪比,经计算可得出发射机输出极限改善因子。需要注意的是测试发射机输出信号噪声比时需要打开发射机高压并且频谱仪与定向耦合之间要接入衰减器,测试发射机输入信号噪声比时不需要开高压和连接衰减器。C波段雷达测试极限改善因子时公式(5)中B取3 Hz,F为测试时雷达实际的工作频率。
2 接收系统
2.1 接收机噪声系数
由于放大器自身有噪声,输出端的信噪比和输入端信噪比不相同,为此,使用噪声系数来衡量放大器自身的噪声水平。噪声系数可定义为接收系统输入端信号噪声比(Si/Ni)与输出端信号噪声比(So/No)的比值,可用公式(6)表示:
(6)
目前C波段多普勒天气雷达噪声系数采用Y因子测量方法,当噪声源不通电时,接收系统的输出噪声为温度T0=290 K时的热噪声,噪声功率为N1;当噪声源通电时,接收系统的输出噪声为温度T2时的热噪声,噪声功率为N2。温度T2是噪声源的有效噪声温度,与有效超噪比ENR之间的关系可用公式(7)表示:

(7)
噪声系数可以用公式(8)表示:

(8)
将公式(7)代入公式(8)中,同时噪声系数用分贝表示为NF,接收机输出噪声功率N1和N2也用分贝表示为P1,P2,可得公式:
NF=ENR有效-10lg(100.1(P2-P1)-1)
(9)
式中,ENR有效为有效噪声源超噪比(单位:dB);P1为断开噪声源的读数(单位:dBm);P2为接通噪声源的读数(单位:dBm)。
噪声功率P1,P2的测量可通过雷达系统或噪声系数测试仪完成,即噪声系数测量方法分为机内噪声源法和机外噪声源法。外接噪声源和机内噪声源测量的差值应≤0.2 dB。
选择机内噪声源法测试时,可以在雷达测试软件内完成噪声系数的测试[3]。选择机外噪声源法测试时,需要外接固态噪声源,目前升级改造后的CINRAD/CD雷达接收机自带28 V电源,可对外接噪声源进行供电,其余C波段多普勒天气雷达可以使用频谱仪自带28 V电源对噪声源进行供电。如果机外噪声源法测量结果达到技术指标要求,机内噪声源法测试结果与外接噪声源法测试结果应不满足差值小于0.2 dB的指标要求,则需要对雷达系统进行进一步检查或维修。方法是修改机内噪声源ENR常数值(即有效超噪比ENR有效),使机内、机外噪声系数测试结果达到技术指标要求。
2.2 接收机动态范围
接收系统动态范围表示接收系统正常工作允许的输入信号强度范围,信号太弱,则无法被检测出来;信号太强,接收机会发生饱和过载。新一代天气雷达的动态范围是指瞬时动态范围,即不含STC(时间灵敏度控制或近程增益控制)的动态范围。动态特性的测量采用外接信号源或机内测试信号源,信号源输出信号在接收机低噪声放大器输入端注入,在雷达终端监控软件上自动获取A/D输出的功率(单位:dBm)或反射率(单位:dBZ)。改变信号源输出信号的功率,测量系统的输入、输出特性。根据输入、输出数据,采用最小二乘法进行拟合,拟合直线斜率为1。由实测曲线与拟合直线对应点的输出数据差值(≤1.0 dB)来确定接收系统低端下拐点和高端上拐点(饱和点),下拐点和上拐点所对应的输入信号功率值的差值即为动态范围。需要注意的是采用机外信号源法时,要准确测量测试电缆的损耗。
3 结束语
C波段多普勒天气雷达的使用,在历次气象灾害过程中充分发挥了“千里眼”的作用,为防灾减灾决策服务提供了有力支撑。做好天气雷达的定标维护工作,是雷达在重大天气过程中能够发挥重要作用的前提。