船体表面矩形块三维布置算法研究
2023-01-18马晓禄
王 平 胡 勇 马晓禄
(武汉理工大学船海与能源动力工程学院 武汉 430063)
0 引 言
消声瓦(别名矩形块,后文统称矩形块)是批量生产的长方体,具有优良的隔声吸声性能和抑振性能[1],是提高潜艇战斗力和生存能力的关键,矩形块布置的好坏会影响到潜艇的性能和作战能力.矩形块的材料大部分为橡胶[2],具有一定的柔性,运用粘贴剂与船体曲面贴合时会产生复杂的弹性变形[3],故在船体外板曲面布置矩形块时,需要对其进行布置设计,以达到兼顾性能和美观,同时使矩形块的切割余量少的目的.为了利于实际生产,学者对船体表面矩形块布置进行了研究.严家祥等[4-5]运用B样条构造曲面,在曲面上构造测地线作为参考线进行矩形块的规划,其方法中测地线网格不均匀,矩形块切割较多.陈志飚等[6-8]利用修正后的四变形网格等面积法,通过展开的平面选取基准点进行布置,将其映射到空间曲面,但是在距离基准点较远的位置会产生错位与变形.吴庆年等[9-10]利用曲面线偏移和正交离散点算法来进行布置,虽然这种布置方法是一种空间布置,但是需要多个离散点来逼近,故使得矩形块的切割数较多.胡勇等[11]提出了根据基准线在外板展开平面上进行矩形块布置设计,再将矩形块映射到三维曲面,生成三维布置图的方法,但会产生曲面展开到平面,平面映射到曲面的两次误差累积.
文中针对现有矩形块布置以船体外板展开为基础进行二维布置,再映射到三维布置的不足,提出了一种三维空间布置矩形块的新算法,用B样条曲线对船体外板曲面曲线进行构造,通过布置参考线、参考线偏移、获取矩形块中心点、确定矩形块位置、矩形块映射到曲面等步骤,实现矩形块的布置.通过计算机编程编写该算法,在CATIA平台实现了矩形块的三维空间布置.由于布置过程避免了矩形块从展开平面映射到三维曲面的步骤,使得算法精度更高,矩形块的切割数目更少.
1 算法描述
1.1 B样条曲面构造
船体外板可以由一系列的空间三维点表达,一般情况下采用非均匀有理B样条(NURBS)来构造 ,那么k×l次B样条曲面为
(1)
式中:{ei,j}{i=0,1,…,m;j=0,1,…,n}为B样条曲面的控制顶点;{Ni,k(u)}{i=0,1,…,m}为曲面在u方向的B样条曲线的基函数;{Nj,l(v)}{j=0,1,…,n}为曲面在v方向的B样条曲线的基函数.在本研究中,取k=3,l=3,故船体外板曲面S(u,v)为
(2)
1.2 布置参考线
布置参考线的选取与船体外板曲面的曲率大小有关,由文献[9]可知:矩形块沿船长方向布置比沿船宽方向布置的变形量要小(由于船体外板在沿船长方向比沿船宽方向的曲率小).综上所述,以船长方向作为布置方向,以敷设区域的边缘作为参考线.
船体外板在船首部分和船尾部分是双曲度的,相较于船中部分复杂得多,图1为船艏外板曲面,因此本文以船首作为研究对象,以顶中线作为布置参考线,进行矩形块的三维布置设计.

图1 船首外板曲面
1.3 参考线偏移
设矩形块的长度与宽度分别为a和b,矩形块的实际布置见图2a),图2b)为矩形块横向与纵向布置.在实际布置中,矩形块之间存在间隙,为使矩形块整齐,将矩形块横向与纵向的间隙设为ε.以1.2节中的布置参考线作为基准,然后偏移参考线.由于在空间上进行偏移,故偏移参考线的点必须在曲面上,因此可以用u方向的B样条曲线来表示偏移参考线,偏移的距离见图2c),第r条偏移参考线的距离公式dr为
(3)
将v=0代入式(2)中,即可得到布置参考线Lre(u)为
(4)
布置参考线即为v=0时u方向的B样条曲线.

图2 矩形块的布置
将参考线进行偏移时,获取v方向所有的B样条曲线集合{Li(v)}{i=0,1,2,…,m}与布置参考线上起点距离为b/2的点的集合,选取方式见图2c),Ai为第i条B样条曲线的弧长.将布置参考线的偏移距离d1(d1=b/2)与弧长Ai之比d1/Ai代入Li(v),得到第1条偏移参考线的控制点Ci为
(5)
根据式(5)可以得到第一条偏移参考线的控制点的集合{Ci}{i=0,1,2,…,m},将这些控制点构造一条u方向的B样条曲线,这条B样条曲线即是第1条偏移参考线Lc(u)为
(6)
(7)


图3 布置参考线的偏移
1.4 获取矩形块中心点
在偏移参考线上获取矩形块的中心点,见图4.需要将布置的起始点选在船体曲面边缘弧长较长的一侧(若选在弧长较短的曲面边缘,会使得布置间隙增大).

图4 偏移参考线上的矩形块中心点

(8)
(10)
式中:Ci为偏移参考线的控制点.
1.5 确定矩形块的位置
在空间中需要三个几何元素才能确定矩形块的四个顶点的位置,见图5.这三个要素是:①矩形块中心点Cr,与偏移参考线上选取的矩形块中心点重合;②矩形块长度方向a,与矩形块中心点偏移参考线切线方向平行;③矩形块的平面法向向量m,应与B样条构造曲面的在矩形块中心点处的法向量平行.

图5 矩形块的空间位置

(10)
矩形块平面法向与矩形块长度方向和矩形块宽度方向两两垂直,即说明曲面在矩形块中心点的法向量m与矩形块长度方向向量a与矩形块宽度方向b两两垂直,即可求出矩形块宽度方向b为
b=m×a
(11)
矩形块长度方向单位向量Cru和矩形块宽度方向单位方向向量Crv:
(12)
(13)
已知矩形块的长与宽为a与b,确定了矩形块的中心点Cr、矩形块长度方向单位向量Cru和矩形块宽度方向单位方向向量Crv,那么矩形块四个点的位置即可确定,见图6.
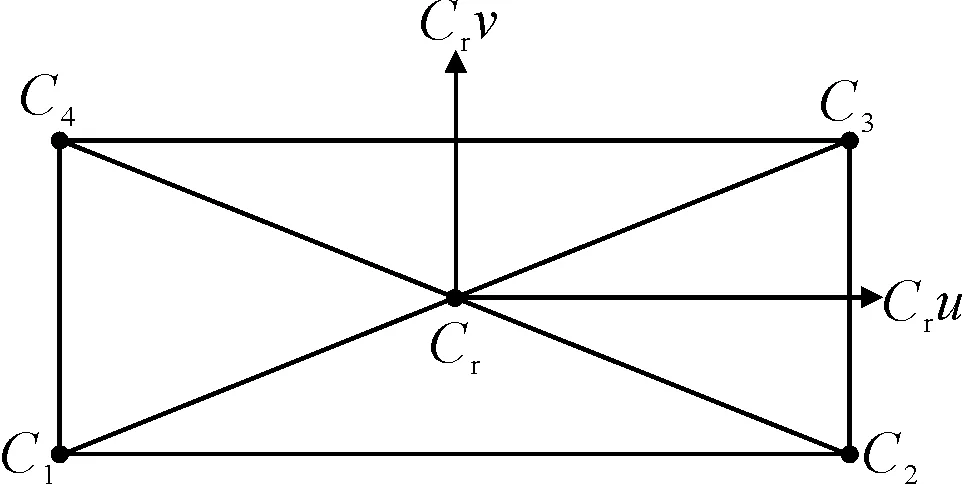
图6 矩形块的四个点位置
矩形块四个点的坐标位置见表1.
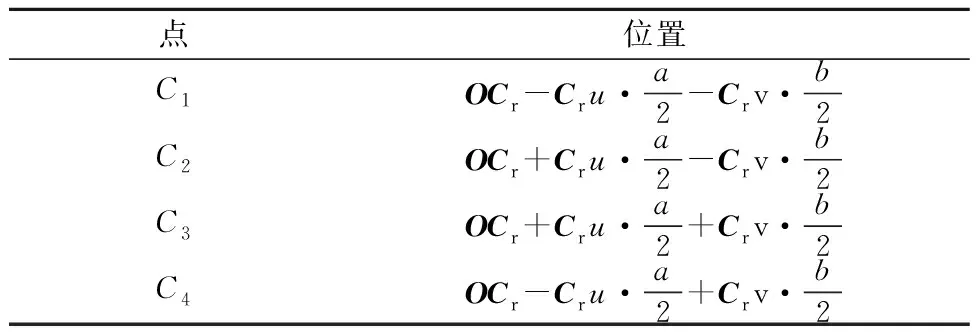
表1 四个点位置坐标
1.6 矩形块映射到曲面
由于矩形块的材料大部分是橡胶,具有一定的柔性,在贴合时会产生复杂的弹性变形,在此特性上,可以把矩形块按映射的方式贴合到船体曲面上.已知矩形块的中心点和其四个点的坐标位置,根据有限元的思想,将矩形块边缘离散为一系列的点,再将这些点投影到船体外板上,将船体外板上映射得到的点重新构造B样条曲线,就可以得到矩形块的边缘轮廓,轮廓线上一点Cr的映射方式见图7.

图7 矩形块中心点在曲面上的投影

将矩形块轮廓上的点根据上述步骤进行投影,得到投影点的位置,再将点连接起来,就完成了矩形块映射到曲面的过程.
2 三维布置算法实现
三维空间布置算法由3大模块组成,其算法流程图见图8.

图8 三维空间布置算法流程图
矩形块布置模块是根据第一节的算法,利用Visual Studio 2017平台,以C#语言编写的控制台应用程序来实现.程序由四个类组成,其功能见表2.

表2 类和功能
3 布置结果与分析
采用1989年美国国防部高级研究计划局(DARPA)的SUBOFF模型进行实验,将模型放大16倍,矩形块的尺寸为800 mm×600 mm,SUBOFF模型见图9.对SUBOFF模型的船首区域进行矩形块布置,其首部布置区域见图10.

图9 SUBOFF模型

图10 船首布置区域
通过程序实现SUBOFF模型船首部分矩形块的布置,布置结果见图11~12.

图11 矩形块的曲面轮廓

图12 船首矩形块布置实体显示
DARPA的SUBOFF模型的船首的矩形块布置结果见表3,与船体外板展开为进行二维布置,再映射到三维布置的方法进行比较,可以发现矩形块的布置切割数和布置间隙减小了.

表3 船首布置结果及对比
4 结 束 语
文中针对现有矩形块布置以船体外板展开为基础进行二维布置,再映射到三维布置的不足,提出了一种三维空间布置矩形块的新算法, 新算法在布置过程中避免了矩形块从展开平面映射到三维曲面的步骤,使得算法精度更高.通过CATIA二次开发COM接口实现数据交换,实现了船首部分矩形块的布置.
通过对美国国防部高级研究计划局(DARPA)的SUBOFF模型进行布置实验,布置结果同传统方法相比,新算法的矩形块切割数较少,布置间隙更小,能够满足工程使用要求.
