基于层次密度聚类和谱间隙的雷达信号分选
2023-01-16黄一峰张什永
黄一峰,朱 明*,王 繁,唐 俊,张什永,牛 锋
(1.安徽大学 电子信息工程学院,安徽 合肥 230601;2.中国电子科技集团第三十八研究所,安徽 合肥 230088)
密集的电磁环境[1]给传统雷达信号分选带来前所未有的挑战,如何在雷达脉冲交叉严重的电磁环境下分选雷达信号是亟须解决的问题之一.按照雷达信号特征参数从侦察到的随机交叠脉冲中分离出各雷达脉冲的过程,称为雷达信号分选[2].雷达信号参数主要有:载频(radio frequency,简称RF)、脉宽(pulse width,简称PW)、到达角(direction of arrival,简称DOA)、幅度(pulse amplitude,简称PA)及到达时间(time of advent,简称TOA)[3].雷达信号分选算法可分为:基于单参数的雷达信号分选算法和基于多参数的雷达信号分选算法.基于单参数的雷达信号分选算法使用TOA,统计前后脉冲到达时间差出现的频率,据此估计重频值.基于单参数的雷达信号分选算法主要有:动态关联法[4]、累级差分直方图(cumulative difference histogram,简称CDIF)法[5]、序列差分直方图(sequential difference histogram,简称SDIF)法[6]、PRI(pulse repetition interval)变换法[7]和改进的PRI变换法[8]等.基于单参数的分选算法依赖TOA,受环境噪声和硬件设备影响出现的脉冲丢失[9]和虚假脉冲[10]影响算法的分选准确率.此外,基于单参数的分选算法的计算量大及阈值选择困难,使该算法不能应用于真实战场[11].基于多参数的分选算法使用可靠参数(如载频、脉宽和到达角等)进行无监督聚类[12],仅需要较少已知信息便能快速对脉冲进行分选.用于雷达信号分选的聚类算法主要有:划分聚类法、密度聚类法及图论聚类法[13]等.早期的雷达辐射源数量少且无复杂调制,聚类算法仅通过参数就可完成分选.然而,现在的雷达参数复杂多样[14],导致基于聚类的分选算法鲁棒性较差.研究人员针对聚类算法进行改进,提出了新的聚类算法.文献[15]利用数据场剔除脉冲流中的干扰脉冲,通过k-means聚类进行分选.文献[16]将层次划分聚类算法用于雷达信号分选,根据脉冲流中辐射源数量进行分选,对复杂调制后的辐射源仍能保持较高的分选准确率.文献[17]结合支持向量机聚类算法和改进模糊C均值算法,提出了一种基于抑制的模糊C均值聚类雷达信号分选算法,提高了分选的准确率.文献[18]引入类调控因子对近邻函数值准则聚类进行改进,提高了分选的实时性.该文拟提出一种基于层次密度聚类和谱间隙的雷达信号分选算法.通过MATLAB仿真实验验证该算法的鲁棒性.
1 基于层次密度聚类和谱间隙的雷达信号分选
1.1 层次密度聚类
层次密度聚类(hierarchical density-based spatial clustering of applications with noise, 简称HDBSCAN)[19]因参数设置简单、能识别噪声而应用于雷达信号分选.HDBSCAN是经典的密度聚类(density-based spatial clustering of applications with noise,简称 DBSCAN)[20]的改进,其对两点距离的重新定义使低密度点更分散,层次概念使收敛速度更快、分选效果更好.HDBSCAN只有超参数min_cluster_size对聚类结果影响较大,该参数需人工设置.图1为HDBSCAN的流程图.

图1 HDBSCAN的流程图
1.2 簇内脉冲检测去噪
层次密度聚类无法剔除与正常脉冲参数接近的杂乱脉冲,杂乱脉冲散乱分布于整个脉冲序列.常规脉冲的出现时间是固定的,杂乱脉冲的出现时间是随机的,如图2所示.从图2中可发现,只有黑色方块影响确定脉冲流中最前和最后常规脉冲的位置,而橙色方块则不影响,故只需对主要杂乱脉冲进行检测及过滤.

图2 脉冲分布图
杂乱脉冲和常规脉冲的时间差要远大于常规脉冲间的时间差,因此可通过箱形图异常值检测剔除杂乱脉冲.图3为箱形图异常值检测去噪示意图,图中圆圈表示异常.通过箱形图检测去噪后,得到了相对准确的簇存在时间.
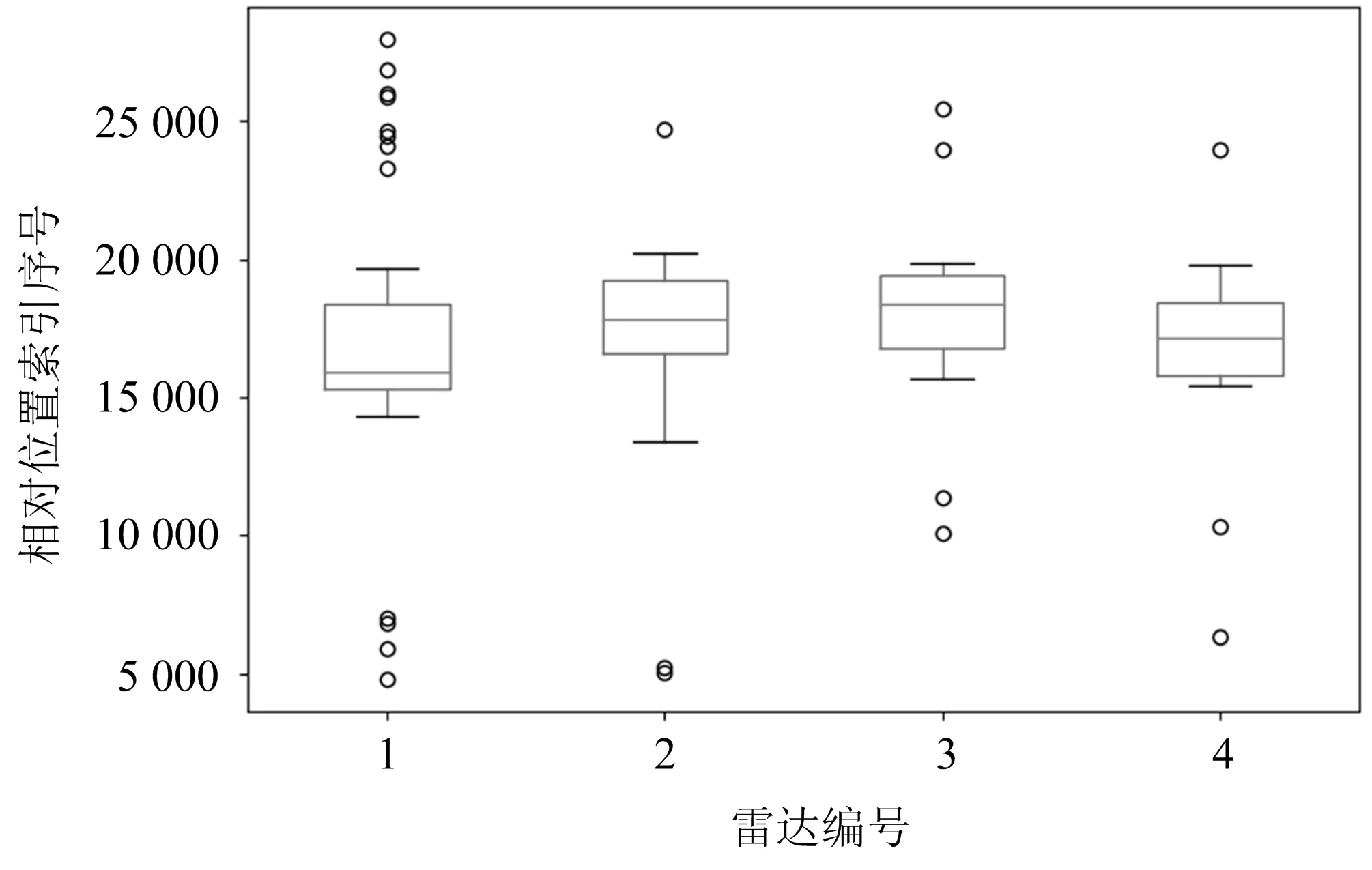
图3 箱形图异常值检测去噪示意图
1.3 距离度量
同一雷达的不同簇不仅时间特征有相似性,密度、载频和脉宽也有相似性.为了提高聚类算法的准确率,该文利用簇间相似性定义簇Ti,Tj间的距离为
(1)
其中:STi为簇i的时间起点,ETi为簇i的时间终点;γ为超参数,取为0.1;ρTi为簇i包含的脉冲数量.
1.4 拉普拉斯谱间隙
考虑到全脉冲数据包含未知数量的信号源,该文通过拉普拉斯谱间隙[21]确定信号源数量.拉普拉斯矩阵L=D-N,其中N是相似矩阵,其表达式为
(2)
权值对角矩阵D的对角元为
(3)
L特征值λ1,λ2,…,λn对应的特征向量为α1,α2,…,αn,则L可表示为
L=(α1,α2,…,αn)Tdiag{λ1,λ2,…,λn}(α1,α2,…,αn).
(4)
通过相邻特征值得到拉普拉斯谱间隙为
θi=λi+1-λi,i=1,2,…,n-1.
(5)
将k(k=argmaxθi)作为k-means聚类的超参数,利用式(4)中的特征向量序列的前k项进行k-means聚类分选.
1.5 基于层次密度聚类和谱间隙的雷达信号分选算法
该文提出的基于层次密度聚类和谱间隙的雷达信号分选算法流程如图4所示.

图4 基于层次密度聚类和谱间隙的雷达信号分选算法流程图
基于层次密度聚类和谱间隙的雷达信号分选算法步骤为:
第1步 对全脉冲数据进行预处理,以剔除杂乱脉冲;
第2步 使用载频和脉宽参数进行HDBSCAN;
第3步 簇内进一步剔除首尾两端的杂乱脉冲;
第4步 将簇最前和最后脉冲的到达时间作为该簇的相对存在时间;
第5步 根据重新定义的簇间距得到赋权邻接矩阵;
第6步 计算赋权邻接矩阵的拉普拉斯谱间隙;
第7步 将k作为k-means聚类的超参数对信号进行分选;
第8步 输出分选结果.
2 仿真实验
2.1 实验设置
该文使用MATLAB仿真10部雷达的298 000条脉冲.10部雷达的脉冲数分别为28 500,71 823,25 388,24 753,14 046,25 635,31 667,38 000,8 513,15 505.10部雷达脉冲的存在时间如图5所示.为了使仿真数据接近真实战场数据,在脉冲中随机加入5%的漏脉冲和5%的杂乱脉冲,杂乱脉冲随机分布于整个脉冲,图5中的黑色线(其纵坐标为-1)表示的是杂乱脉冲.
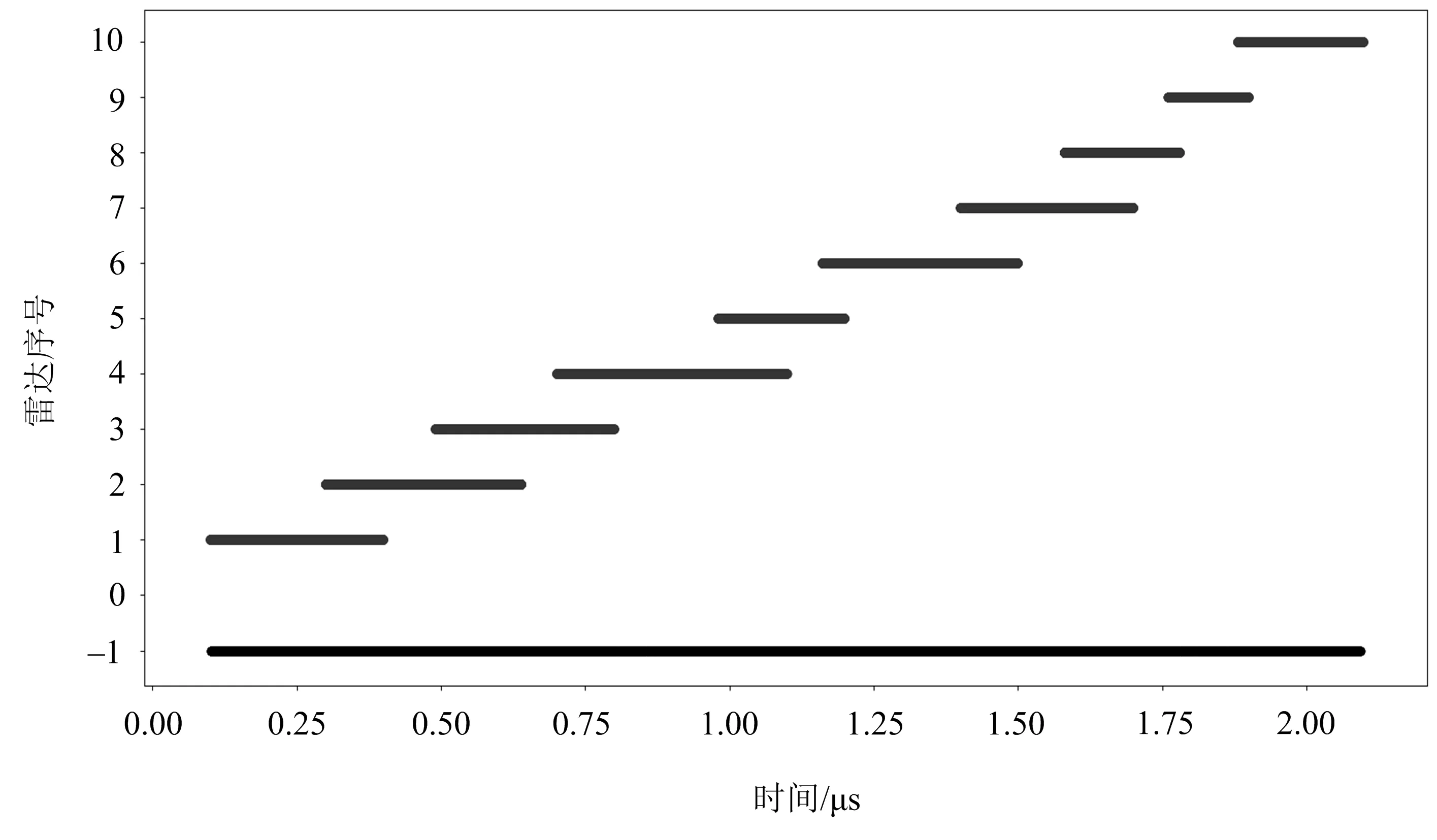
图5 10部雷达脉冲的存在时间
10部雷达信号的仿真参数如表1所示.

表1 10部雷达信号的仿真参数
为了体现雷达模式的多样性[22],仿真了不同调制下的雷达信号.图6为不同调制下雷达信号的参数分布,图中DIFF为相邻两条脉冲的到达时间差.
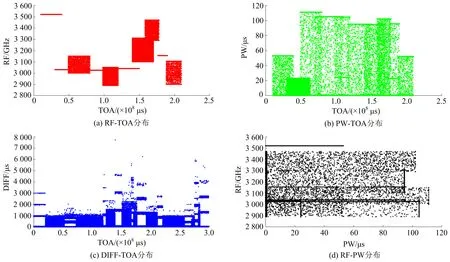
图6 不同调制下雷达信号的参数分布图
2.2 分选准确率和召回率
分选准确率和召回率的计算公式分别为
(9)
(10)
其中:Ci为被识别为第i部雷达脉冲的脉冲数量,Cii为识别正确的第i部雷达脉冲数量,Q为脉冲流中的雷达总数,Gi为脉冲流中属于第i部雷达的脉冲数量.10部雷达的分选准确率和召回率如表2所示.
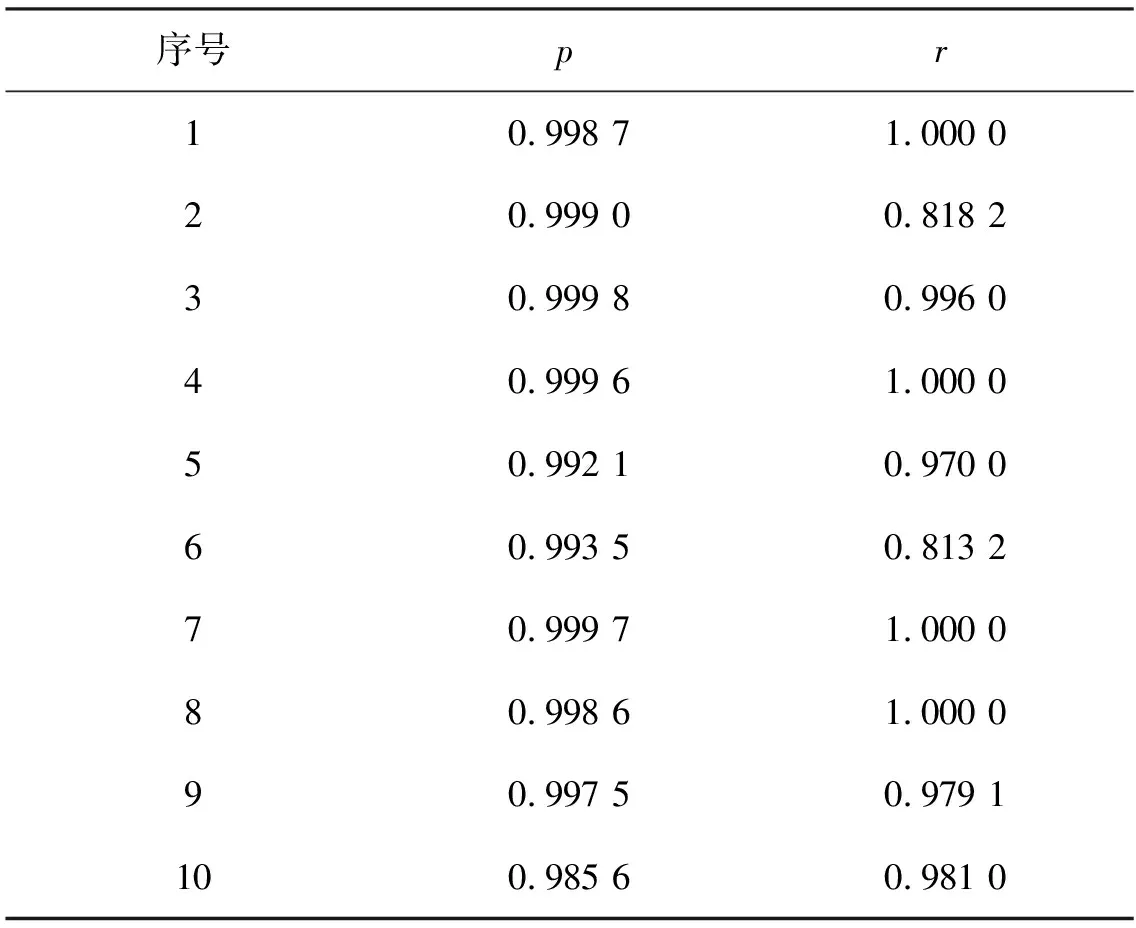
表2 10部雷达的分选准确率和召回率
由表2可知,10部雷达的平均分选准确率达0.996 0,平均召回率达0.956 0,表明该文算法能准确分选出交错的雷达脉冲,
2.3 算法的鲁棒性
2.3.1 杂乱脉冲的干扰
雷达接收机在噪声影响下会接收到虚假的脉冲,在空气中传播时物体反射会使脉冲发生变化,这些情况下产生的脉冲称为杂乱脉冲[23].图7为3种(该文,DBSCAN和Meanshift[24])算法的杂乱脉冲占比与分选准确率和召回率的关系曲线.由图7可知:相对于DBSCAN和Meanshift,该文算法的分选准确率和召回率均最高;在杂乱脉冲占比达50%时,该文算法的分选准确率和召回率分别达0.82和0.92,表明该文算法对杂乱脉冲干扰有较强的抗干扰能力.

图7 3种算法杂乱脉冲占比与分选准确率和召回率的关系曲线
2.3.2 漏脉冲的干扰
在密集电磁环境下,脉冲重叠会产生漏脉冲,雷达接收机硬件设备损坏也会产生漏脉冲[25].图8为3种算法的漏脉冲占比与分选准确率和召回率的关系曲线.由图8可知:当漏脉冲占比增大时,3种算法的分选准确率和召回率均减小;相对于DBSCAN和Meanshift,该文算法的准确率和召回率均最大,表明该文算法对漏脉冲干扰有最强的鲁棒性.

图8 3种算法的漏脉冲占比与分选准确率和召回率的关系曲线
2.3.3 超参数的干扰
该文算法只有一个超参数min_cluster_size,该文对min_cluster_size与分选准确率的关系进行了实验,结果如图9所示.

图9 min_cluster_size与分选准确率的关系曲线
由图9可知:min_cluster_size的取值位于10~220时,分选的准确率大于90%;当min_cluster_size大于220后,分选准确率出现明显下降;当min_cluster_size为300时,分选准确率为70%.因此,该文算法对超参数干扰有较强的鲁棒性.
3 结束语
该文提出了基于层次密度聚类和谱间隙的雷达信号分选算法.仿真实验结果表明:该文算法的平均分选准确率达0.996 0、平均召回率达0.956 0;相对于BDSCAN和Meanshif算法,该文算法对杂乱脉冲、漏脉冲及超参数的干扰均有最强的鲁棒性.因此,该文算法对复杂场景具有很好的适应性.
