复合翼无人机不同传感器探测大气温湿度对比
2023-01-11陈洪滨施红蓉黄晓松朱伟锋朱彦良2王普才2
常 越 陈洪滨 施红蓉 黄晓松朱伟锋 朱彦良2) 王普才2) 刘 洁
1)(中国科学院中层大气和全球环境探测重点实验室,北京 100029)
2)(中国科学院大学,北京 100049)
3)(成都信息工程大学,成都 610225)
4)(中国气象局气象探测中心,北京 100081)
引 言
无人机作为搭载多种低空及高空大气探测设备的飞行平台,具有多方面的气象探测优势,能弥补其他探测手段在时空分辨率和覆盖率上的不足。高空大型无人机(如全球鹰)具有巡航距离远、载荷量大和可靠性高等优点,而微小型气象探测无人飞行器具有作业低成本、低速和机动性强等特点,国内外越来越多的科技人员利用无人机进行气象与环境探测或业务化运行试验[1-16]。用无人机替代有人驾驶飞机执行高风险作业任务,已是当今气象与环境探测领域的一个重要发展方向[17-21]。无人机在台风监测和气象灾害探测中发挥着重要作用[22-25]。同时,气象要素空间分布不均匀和日变化大,利用新型探测设备开展精细探测对于改进天气和空气质量预报至关重要[26-27]。因此,需要发展和充分利用各种新型气象探测手段,以实现对大气多要素高时空分辨率的探测[28]。目前利用无人机进行大气探测存在数据比对验证、数据质量控制等诸多问题,包括机载传感器的选型、安装位置以及飞行过程对传感器观测造成的影响,产生的误差均可能超过WMO 的高空观测要求[29-32],成为制约无人机进行科研和业务应用的主要因素。
在我国平坦开阔和天气多变地区,如何充分发挥无人机机动灵活的优势构建高低空无人机组合的协同观测系统,探索不同飞行方式对资料获取的有效性、经济性,验证其观测资料的准确性、代表性、可用性及未来业务应用前景,仍是值得深入开展的研究课题。目前大气探测采用固定翼和多旋翼两种无人机平台,固定翼无人机具有航程远和载荷量大等优点,但起降需要平坦开阔的场地;多旋翼无人机具有垂直起降和空中定点悬浮等功能[33],缺点是巡航速度慢、续航时间短。为了综合利用两类无人机的优点,克服其主要缺点,中国科学院大气物理研究所自主研发了一款旋翼和固定翼组合的新型无人机(unmanned aerial vehicle,UAV)(简称无人机)。
为验证该无人机气象探测能力,同时检验无人机加载自动气象站(automatic weather station,AWS)(简称自动站)的探测可靠性,技术研发团队在内蒙古自治区正镶白旗无人机综合验证基地,开展了不同传感器大气温度和湿度探测的比对试验。
1 仪器与试验简介
1.1 试验仪器
在内蒙古自治区正镶白旗两期综合野外试验中使用了GPS探空系统、自动站和维萨拉温度、湿度探头(维萨拉温湿探头),3种温湿传感器主要性能参数见表1。其中GPS探空系统由GPS探空仪及多通道接收机等组成,探测要素为气压、温度、湿度和风向、风速。

表1 3种温湿传感器性能参数Table 1 Specifications of temperature and humidity of 3 sensors
GPS探空仪由航天科工集团23研究所研发提供,该型探空仪参加了2008年世界气象组织(WMO)组织的广东阳江探空比对试验,各要素探测范围和精度得到验证[34]。
自主研发的无人机飞行速度为90~130 km·h-1,载荷为3 kg,航程可达400 km。该无人机结合了旋翼机和固定翼无人机的优点:起飞和降落阶段采用电动多旋翼机方式垂直起降,对起降场地条件要求低;在飞行作业阶段采用固定翼方式由汽油发动机推进。比常规旋翼机航时长、速度快、飞行高度高,能获得更长时间和更大空间范围的探测资料。
为实现气压、温度、相对湿度的同步飞行测量,在无人机前顶部装载自动站,该型自动站已进行多次地面车载和船载探测试验,验证其在运动状态下气象要素的探测能力。无人机发动机和螺旋桨后置,避免了飞机飞行时对温度、湿度和气压测量的影响。
2020年试验期间,无人机前机身下部外挂1只GPS探空仪,地面接收机接收探空仪数据;2021年GPS探空仪温湿传感器和发射天线外置,而探空仪盒置于机身内,以减小飞行阻力。2021年无人机还加挂1只维萨拉温湿探头。
由于受飞行空域管控的制约,飞行高度限制在距地面900 m 高度以下,因此,试验中无人机仅能在近地面大气层进行探测,虽然其最大飞行高度可达6000 m,航时可达4 h。
1.2 试验概况
为了对无人机机载自动站和GPS探空仪探测近地面大气层的性能进行检验与比对评估,2020年7月28日—8月6日及2021年8月1—6日开展了两期试验。
试验地点位于内蒙古自治区正镶白旗新河水库库边,飞行试验点的水库中心有积水(面积约20 m×30 m);北部和东部为缓坡草地,西部为堤坝,南部和西北部为小山丘,水库底部距山丘顶高度小于40 m。GPS探空气球释放点位于水库西北山丘的西南坡下,海拔高度为1280 m。无人机起降点位于四周开阔的水库东北部草地上,海拔高度为1262 m。
2020年的飞行试验中,飞机上同时搭载1个自动站和1只GPS探空仪,两者所测的温度和湿度可直接进行比较。2021年无人机同时搭载两种仪器(即自动站和GPS探空仪、自动站和维萨拉温湿探头),可对3种仪器的测量两两进行比较。
1.3 无人机飞行情况及地基GPS探空数据分析
由于受空域管制制约,为获取良好的试验效果,飞行探测方案不断调整。无人机先垂直上升至约30 m 地面高度悬停,然后爬升或平飞。空中总飞行时间为1.0~2.5 h。通常在无人机飞行探测阶段或前后,释放1~2只GPS气球探空。表2给出用于对比分析的无人机5次飞行信息(包括时间、时长和天气状况),文中时间均为北京时,下同。
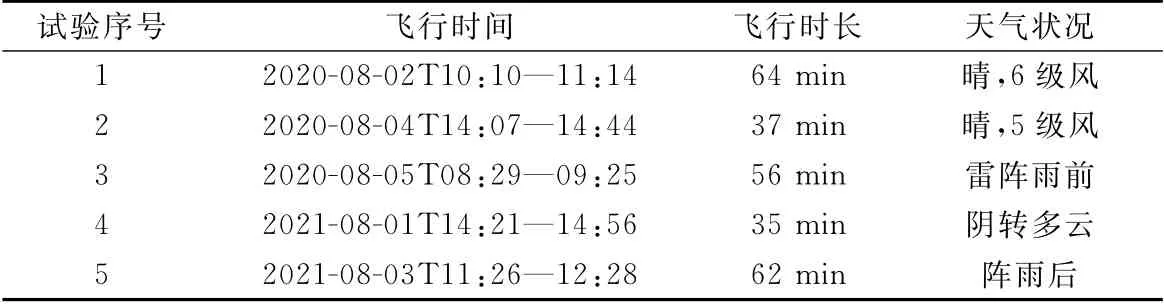
表2 无人机飞行探测时间及时长Table 2 Time and duration of UAV-borne AWS and GPS radiosonde
图1分别为2020年8月2,4,5日GPS探空仪探测的低对流层位温、相对湿度和风速、风向廓线,对应施放气球时间分别为8月2日10:10,8月4日13:55,8月5日12:08,虽然与无人机飞行时间并非完全一致,但可获得飞行时段或前后的近地面大气层气象背景情况。由图1可见,试验期间中午前后近地面大气层内(距地面700 m 高度以下)位温递减率接近(0.6 K·(100 m)-1),但位温差异显著;近地面大气层内相对湿度随高度增加,8月4日的相对湿度最高,对应当日温度较低;2020 年8 月2日的风速较大,从地面的3 m·s-1增加到11 m·s-1(海拔高度1650 m,6级);3 d中风向随高度的变化范围不大。

图1 2020年8月2,4,5日地基GPS探空测得的位温、相对湿度及风速、风向廓线Fig.1 Temperature,relative humidity,wind speed,and wind direction measured by ground-based GPS radiosonde on 2 Aug,4 Aug,5 Aug in 2020
图2a和图2b分别为2020年8月2日无人机飞行路线上测得的温度和相对湿度。由于飞行时间历时超过0.5 h,在无人机上升和下降段温湿数据差异明显,反映了气象要素的时空变化。近地面大气层内上下温度差异明显,在同一层平飞段温度变化较小;但从相对湿度看,即便在同一层历时几分钟内的飞行测量(水平长边飞行距离为5 km)也表现出较显著的变化。
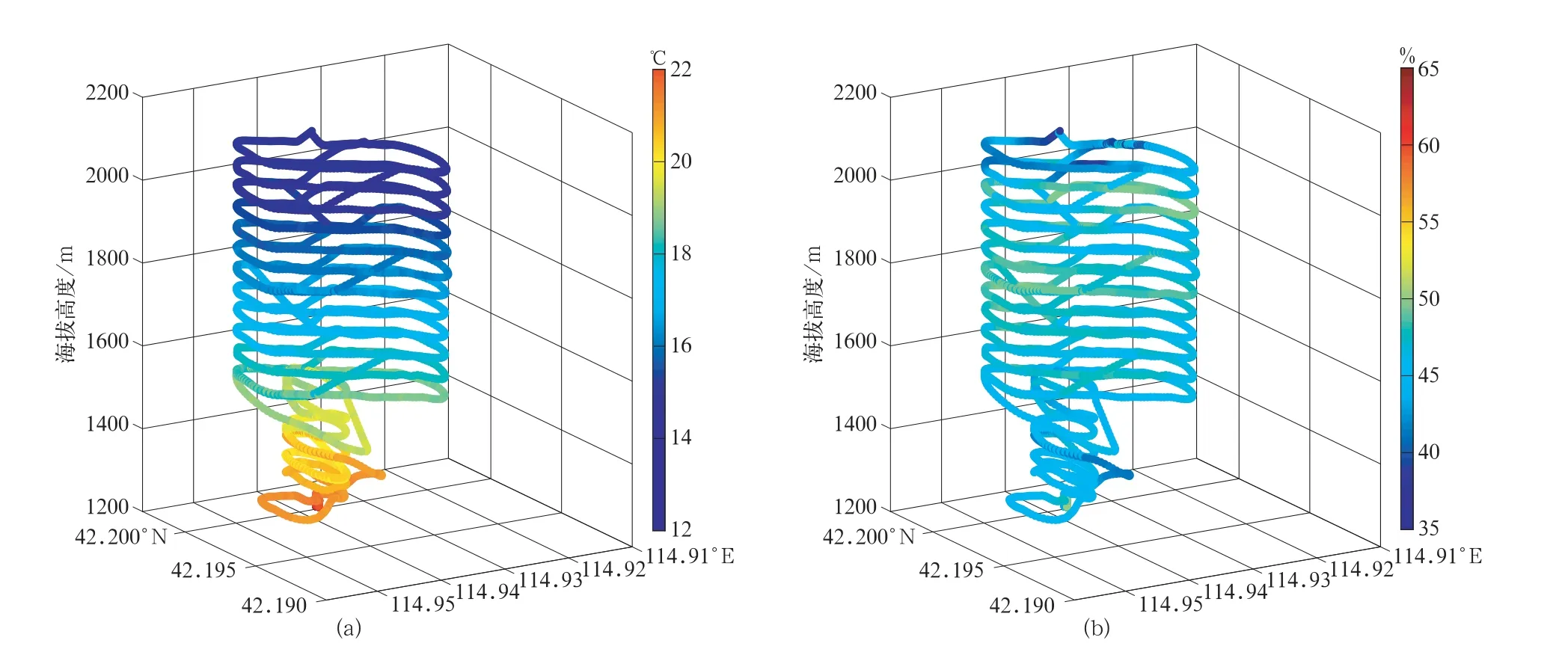
图2 2020年8月2日10:10—11:14无人机机载自动站飞行探测的温度(a)和相对湿度(b)Fig.2 Temperature(a)and relative humidity(b)measured along the flight trajectory UAV-borne AWS during 1010 BT-1114 BT on 2 Aug 2020
图3为2020年8月2日无人机机载自动站在1次飞行过程中飞行姿态的变化以及温度、相对湿度的时间序列。由图3 可见,此次飞行轨迹在约10:55 之前呈阶梯式上升,从飞机俯仰角(pitch,即机体轴与地平面之间的夹角)上难以看出转弯乃至上升过程;从滚转角(roll,即无人机绕前后轴转动的角度)和偏航角(yaw,即实际航向与计划航向之间的夹角)可以清楚地分辨每个转弯和平飞过程,视滚转角的变化(大于20°)定义为“转弯过程”。图3显示在无人机同一个高度上水平转弯的飞行过程中温度和相对湿度变化较小,温度变化为0.1~0.2℃,相对湿度变化为0.1%~2%,温度(相对湿度)仅随飞行高度的增加(降低)而减小(增大),且不随无人机姿态角的变化显著变化。通过比较分析该次飞行过程中自动站和GPS探空仪所测数据,得到不同高度水平飞行的温度相关系数为0.98,绝对偏差为1.83℃;相对湿度的相关系数为0.75,绝对偏差为4.77%;总飞行过程中温度相关系数为0.97,绝对偏差为2.05℃,相对湿度相关系数为0.52,绝对偏差为4.93%。可见,无人机在上升和下降过程中两种仪器所测的温度和相对湿度差异稍大,因此以GPS探空仪的测量为参考,对平飞过程自动站的温度绝对偏差进行订正,结果与探空仪所测温度的一致性更好。
由图3可见,部分相对湿度绝对偏差较大的情况主要发生在相对湿度变化较大的时段,原因在于两种湿度传感器的响应时间不同;在相对湿度空间分布均匀处,两者所测的相对湿度更为一致。10:55后两种湿度测量绝对偏差反相,这是由于无人机快速下降时,湿度随高度变化较大,两种传感器响应快慢不同所致。

图3 2020年8月2日10:10—11:10无人机飞行海拔高度、姿态角、温度、相对湿度的变化Fig.3 Time series of the UAV flight height,attitude angles as well as the measured temperature and relative humidity in the flight during 1010BT-1110BT on 2 Aug 2020
2021年夏季试验中,无人机同时搭载1只GPS探空仪、自动站和维萨拉温湿探头,图4 显示2021年8月1日下午GPS探空仪和维萨拉温湿探头测量的时间序列结果。由图4可见,两者趋势的一致性较好,温度平均绝对偏差为1.44℃,相对湿度平均绝对偏差为5.73%。14:48后温湿度均出现绝对偏差反相,原因是随着飞机较快速的下降,温度和湿度变化大,而维萨拉温湿探头的响应时间较长,测量相对滞后。因此,该型温湿度传感器适合低飞行速度 条件下(如旋翼机)的测量。
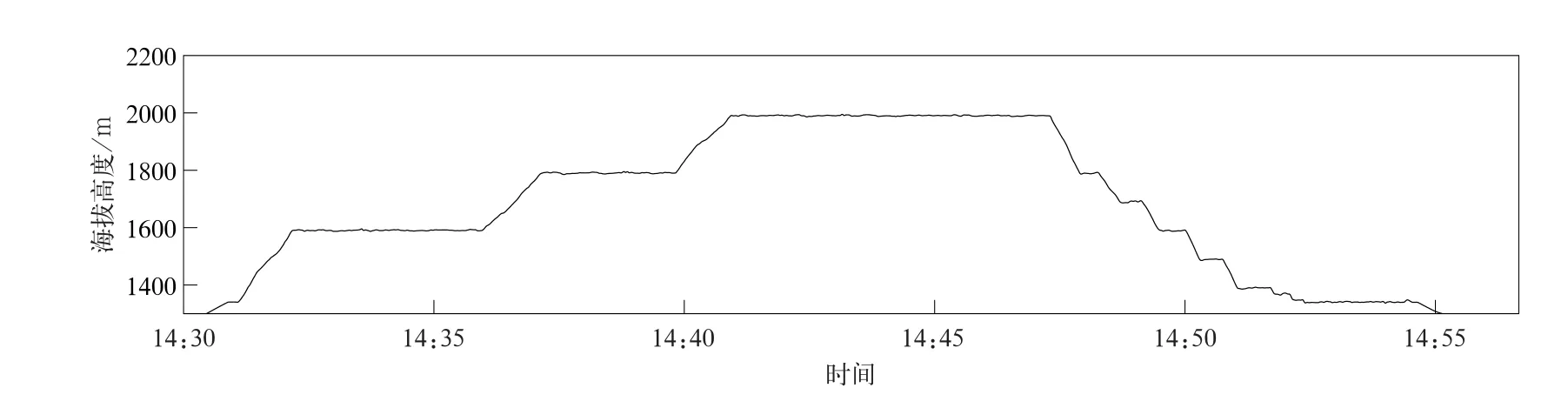
图4 2021年8月1日飞行高度、维萨拉温湿探头及GPS探空仪的温度和相对湿度时间序列Fig.4 Time series of flight height,temperature and relative humidity measured by UAV-borne Vaisala temperature and humidity probe and GPS radiosonde on 1 Aug 2021
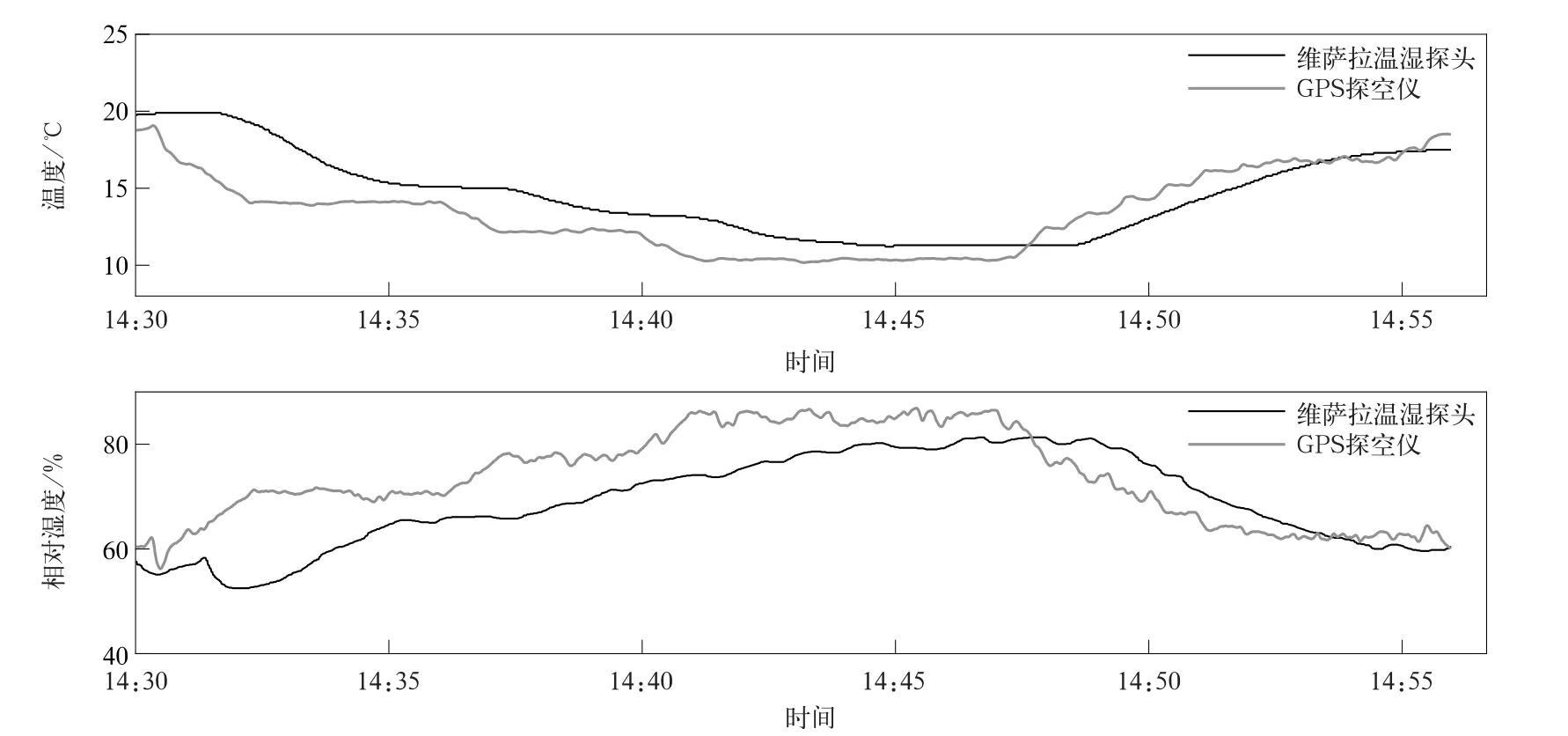
续图4
2 对比分析
2.1 无人机探空数据匹配与比较方法
2020年无人机搭载自动站和GPS 探空仪,2021年无人机同时搭载自动站、GPS探空仪、维萨拉温湿探头。以GPS探空仪的气象要素测量值为参考(已通过WMO 比对试验验证),对观测数据进行两两比对,统计分析前剔除个别异常数据。下面分别计算和分析温度和相对湿度数据的相关系数(以下显著性水平均为0.05)、绝对偏差和均方差。
2.2 温度探测比较
图5为两次试验期间无人机机载不同传感器获得的可比温度散点图,2020年有3组(图5a);2021年由于多雨,可飞行的试验时间少,两种传感器同时观测数据各仅有1组。

图5 无人机机载不同传感器温度散点图(a)2020年8月2,4,5日自动站与GPS探空仪,(b)2021年8月1日维萨拉温湿探头与GPS探空仪,(c)2021年8月3日自动站与GPS探空仪,(d)2021年8月5日维萨拉温湿探头与自动站Fig.5 Scatter plots of the temperature measurements by UAV-borne sensors(a)AWS and GPS radiosonde on 2 Aug,4 Aug,5 Aug in 2020,(b)Vaisala temperature and humidity probe and GPS radiosonde on 1 Aug 2021,(c)AWS and GPS radiosonde on 3 Aug 2021,(d)AWS and Vaisala temperature and humidity probe on 5 Aug 2021

续图5
图5a为2020年夏季两次无人机机载自动站与GPS探空仪所测温度的对比,计算可得其相关系数为0.99,绝对偏差为1.74℃,均方差为1.76℃。平飞时段两者相关系数为0.99,绝对偏差为1.78℃,均方差为1.81℃。由2020年与2021年温度的比较结果可见,虽然自动站与GPS探空仪测得的温度间有绝对偏差,但两者具有较高相关性,且绝对偏差大小相对固定在2.00~2.35℃范围内。
2021年夏季,无人机机载自动站、GPS探空仪及维萨拉温湿探头测得的温度比较分析结果如下:自动站与GPS 探空仪温度的相关系数为0.98,绝对偏差为2.34℃,均方差为2.35℃,平飞过程的相关系数为0.99,绝对偏差为2.35℃,均方差为2.36℃;维萨拉温湿探头与GPS探空仪平飞过程温度的相关系数为0.96,绝对偏差为1.41℃,均方差为1.70℃;维萨拉温湿探头与自动站温度的相关系数为0.98,绝对偏差为4.13℃,均方差为4.25℃,平飞过程的相关系数为0.99,绝对偏差为4.49℃,均方差为4.53℃。
从两期试验结果的绝对偏差看,自动站与GPS探空仪的温度测量绝对偏差相对固定,如果以此绝对偏差对无人机机载自动站的温度进行订正,则无人机机载自动站探测可得到近地面大气层水平方向与垂直方向的温度变化信息。维萨拉温湿探头与GPS探空仪所测温度数据一致性,还需要更多试验数据进一步验证。
需要说明的是,GPS探空仪上温度探测的珠状热敏电阻器在白天进行探测业务时会受到辐射加热而升温几度(相对环境温度)[35],自动站可在地面进行测量试验,而GPS探空仪因无附加的防辐射装置且可能受电池发热影响,故不能在地面进行两者近距离的对比测试,相对湿度的测量也存在类似问题。
2.3 相对湿度探测比较
比较2020年夏季无人机机载自动站与GPS探空仪的相对湿度数据,可分析的数据组与温度相同,并比较分析2021年夏季不同传感器之间的相对湿度数据(图6)。
图6a是2021年夏季3 次自动站与GPS 探空仪所测相对湿度的对比,计算可得其相关系数为0.84,绝对偏差为4.28%,均方差为5.05%;平飞过程的相关系数为0.83,绝对偏差为4.94%,均方差为5.50%。

图6 同图5,但为相对湿度Fig.6 The same as in Fig.6,but for relative humidity
2021年夏季自动站与GPS 探空仪、维萨拉温湿探头与GPS探空仪、维萨拉温湿探头与自动站测得的相对湿度比较分析结果如下:自动站与GPS探空仪湿度的相关系数为0.71,绝对偏差为3.83%,均方差为4.48%,平飞过程的相关系数为0.91,绝对偏差为4.85%,均方差为5.72%;维萨拉温湿探头与GPS 探空仪湿度的相关系数为0.82,绝对偏差为5.73%,均方差为7.00%,平飞过程的相关系数为0.92,绝对偏差为6.07%,均方差为7.43%;维萨拉温湿探头与自动站湿度的相关系数为0.78,绝对偏差为6.92%,均方差为8.82%,平飞过程的相关系数为0.84,绝对偏差为4.88%,均方差为5.75%。
总体上,自动站与探空仪所测相对湿度的绝对偏差小于5%(位于WMO[36]误差范围内),而标称精度相对较高的维萨拉温湿探头所测数据与其他两种传感器测值之间的绝对偏差相对较大,原因是其传感器的响应时间较长,测量结果相对滞后,因此无人机搭载传感器应尽量采用响应速度快的,才能满足高时间和空间分辨率探测的要求。
2.4 无人机平飞探测数据分析
考察2020年8月2日10:17—10:22无人机平飞以及爬升过程中飞行姿态对气象数据测量的影响,图7显示该时段无人机从海拔高度1525 m 爬升到1578 m 且在1578 m 平飞及转弯时高度、3个姿态角、温度、相对湿度的变化情况。
图7显示在1578 m 海拔高度有较长水平飞行,中间有3次转弯(见图7的滚转角)。由平飞过程温度的变化可见,自动站温度最大偏差为0.5℃,一般变化幅度为±0.2℃,探空仪温度的最大变化幅度为0.6℃,一般变化幅度为±0.2℃。两种传感器所测温度均与无人机姿态角变化无对应关系。由平飞过程相对湿度的变化可知,自动站和探空仪所测相对湿度变化幅度均为3%,同样不随无人机的姿态角变化。可见温度和相对湿度测量受飞行姿态影响很小,因此利用无人机进行温湿度探测可以反映不同高度层的变化,均可保留使用。
无人机平飞过程中对应的飞行时间长度为4~5 mins(对应顺风和逆风),水平距离为5000 m,温度随高度降低,且在各个高度层均有一定变化,变化幅度明显大于因飞行高度变化引起的温度递减值(0.6℃·(100 m)-1),在距地面300 m 高度的平飞过程短时间(距离)内出现了0.6℃的变化,考虑航迹下地形与覆盖因素,此种现象应为对应山丘地形的热泡现象,该现象尚需进一步探测验证。
此外,由图7可见,相对湿度在相同高度层起伏变化较大,该趋势在图2b也有反映,表明无人机能探测到各高度层相对湿度的水平分布不均匀量值,为了能更准确探测相对湿度在空间结构上的差异,采用具有能进行垂直和水平飞行观测能力的复合翼无人机进行探测。
图8为2020年8月2日飞行观测温度和相对湿度在多高度平飞段的均方差分布。由图8a可见,自动站和GPS探空仪的温度均方差均较小,大多分布在0~0.2℃,0.2~0.4℃各出现两次,进一步说明无人机水平飞行过程温度测量的一致性;由图8b可见,自动站和GPS探空仪相对湿度的均方差大多分布在0~4%,4%~8% GPS探空仪出现两次;相对湿度水平分布均方差随高度有增大趋势,可能对应增大的水平不均匀性。
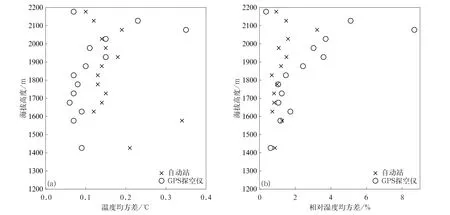
图8 2020年8月2日无人机在13个高度平飞过程中温度(a)和相对湿度(b)均方差Fig.8 Mean square error of air temperature(a)and relative humidity(b)measured by the UAV during the constant level flights on 2 Aug 2020
3 结论与讨论
为验证长航时无人机的飞行能力及机载自动站的可用性,在内蒙古自治区正镶白旗开展了两期综合观测试验。该型无人机机载自动站、GPS探空仪和维萨拉温湿探头,进行多高度层往返水平飞行,获得温度和湿度的探测数据,对3种探测数据进行分析与比较,主要结论如下:
1)两期无人机飞行探测试验表明,该新型无人机上搭载自动站进行温度和相对湿度的探测。2020年夏季试验中,无人机同时搭载自动站与GPS探空仪,二者的测量一致性很好,虽然两者所测温度存在2.00℃~2.35℃的绝对偏差,但其变化趋势一致,同时自动站所测温度数据与GPS探空仪的绝对偏差与仪器的误差范围基本符合,且绝对偏差相对固定,偏差订正后的测量数据可在业务上使用。
2)2020年试验无人机搭载自动站和GPS探空仪测量的相对湿度绝对偏差范围在4.5%以内,能够满足WMO 对相对湿度测量比对要求;2021年夏季试验无人机搭载GPS探空仪与维萨拉温湿探头所测的温湿度数据也有良好的一致性,但维萨拉温湿度传感器表现出响应时间明显滞后,而响应时间长的传感器不适合应用于复合翼机上的探测。
3)无人机机载自动站在上升和下降阶段可获得近地面大气层温湿廓线资料,但过快的下降速度造成温湿传感器时滞效应明显,不适合飞行速度较快的探测;无人机在平飞过程的飞行姿态变化及转弯对温度和湿度测量的影响可以忽略,平飞段温湿变化反映边界层大气水平不均匀性,为了能更准确探测温湿在空间结构上的差异性,采用具有在大气近地面层中进行垂直和水平飞行观测能力的无人机进行探测具有一定优势。
两期飞行探测试验初步表明,复合翼无人机是一种探测近地面大气层的实用飞行平台。但由于空域限制,飞行试验获取的数据量较少,同时温湿传感器的时滞效应对测量的准确性造成影响,目前还不足以对多种近地面大气层结构特征和变化规律的研究提供支撑,今后将进行加密探测试验,搭载更多类型适宜于复合翼无人机类型的气象要素传感器,尤其是搭载具备测风能力的微型自动站,解决无人机测风问题;通过观测数据的比较,优化确定机载传感器和相应飞行方式(即不同上升、下降和水平飞行模式),以便更好地对近地面大气层开展无人机探测,提升无人机大气探测技术水平。此外,应增加部署其他地基大气廓线探测设备,如风廓线雷达和激光测温测风等,开展多源探测数据的比较与融合分析。
