基于逆向可变车道动态控制的交叉口信号优化
2023-01-11招晨陈亮胜许倩庞希廉
招晨,陈亮胜,许倩,庞希廉
(1.长沙理工大学交通运输工程学院,湖南 长沙 ,410114;2.浙江中控信息产业股份有限公司,浙江 杭州 310051;3.广西路建工程集团有限公司,广西 南宁 530001)
随着我国城市化进程的不断发展,传统的交通组织方式难以适应日益增加的道路车辆带来的交通需求。其中,道路交叉口左转交通量剧增,使交叉口拥堵成为一种常态,这种情况严重地影响了城市整体路网的通行效率[1]。为充分挖掘交叉口的时空资源,缓解左转交通量过大带来的交通拥堵压力,许多学者提出了禁止左转、增设左转待行区、设置逆向可变车道等智能交通组织方式[2-6]。其中,设置逆向可变车道这一方法可以利用现有的道路条件,通过预信号控制和改变车道属性,使其与实际交通流量需求相匹配。该方法可以有效地降低交叉口的车辆延误,得到了广泛的实际应用。
针对逆向可变车道设置的研究,大致分为两类:①对设有可变车道的交叉口进行渠化。朱腾洲等人[7]提出了移位左转的方法,即将左转车道转移至对向车道。蒋贤才等人[8]研究了包括车道和变道段长度在内的可变车道设计要点,并建立了相关计算模型。②根据车流运行状态,对设有逆向可变车道的交叉口的相位相序进行设计与配时。WONG等人[9]建立了以交叉口延误时间最小化为目标函数的可变车道信号配时的优化模型。ZHOU[10]建立了以信号配时参数为约束变量,车均延误时间最小化的可变车道优化模型。孙锋等人[11]提出了在左转车道过饱和状态下,通过控制逆向可变车道交叉口的信号相位相序、信号周期、绿灯时长、绿灯提前启亮时刻和车辆清空时间等参数来减少车辆延误时间的方法。蔚苹等人[12]建立了一种新的可变车道信号控制优化模型,该模型以预信号时长为约束变量,通过最大化左转通行能力得到。这些研究均建立在定时控制的基础上,没有考虑车流的实时数据。因此,在实际应用中,这些方案往往会在预信号的绿灯开启时段内,造成可变车道内的车辆不能清空的情况,引发交通拥堵,造成交叉口较长时间的延误。
本研究在分析交叉口的左转车流时,采取动态控制的方法,通过设置车道检测器,获取车流的实时速度和流量,研究可变车道控制方案,并通过协同配时,分析交叉口内的信号变化,建立交叉口信号控制的优化模型。最后,以长沙市芙蓉路-营盘路交叉口的实时交通流量为实例,利用该动态控制优化模型求解,获得了比定时控制更好的配时方案。
1 逆向可变车道的动态控制
为实现对可变车道的动态控制,分析可变车道车流运行状态,研究车道的功能转换,完善可变车道的监测与诱导系统。
1.1 车流运行状态分析
1.1.1 车辆进入过程
车流进入车道时,可变车道的功能是作为进口道的等待区,因此,在车辆清空后,可变车道的预信号绿灯开启。可变车道的预信号绿灯开启时刻应在相交方向直行相位之后,保证出口道能清空该相位应放行的所有车辆。如果绿灯启亮时间过短,即绿灯开启过晚,则可能造成可变车道的资源浪费;如果预信号绿灯启亮时间过长,即绿灯开启过早,则容易造成可变车道内的车辆与相交方向的直行车辆之间的冲突。因此,预信号绿灯最晚开启时刻要保证此时第一辆车能刚好到达停车线,故绿灯最短提前启亮时间tmin为:

式中:to为第一辆车进入可变车道的时刻;LN为可变车道的长度;v1为第一辆车进入可变车道的行驶速度。
1.1.2 车辆候车过程
车辆在候车过程中进入可变车道,此时,逆向可变车道的车辆受主信号控制。
1.1.3 车辆清空与离开过程
为保证逆向可变车道由进口道转变为出口道,在左转主信号由绿灯变为红灯之前,需要清空逆向可变车道上的左转车辆。如果预信号绿灯关闭时间过早,容易出现逆向可变车道不能充分利用的现象,造成道路资源的浪费;如果预信号绿灯关闭过晚,则会导致逆向可变车道不能清空的情况。因此,逆向可变车道的信号绿灯关闭时刻要比该车道左转信号绿灯的结束时刻更早,这样才能保证可变车道的清空。可变车道的清空时间取决于该车道内的车辆数。当可变车道和常规左转车道都有存车位置时,驾驶员往往更愿意进入常规左转车道。因此,逆向可变车道的清空时间的计算公式为:

式中:T1为逆向可变车道的安全清空时间;ht为车辆的平均车头距离;q为车辆到达率;re为周期内红灯持续时间;a为常规左转车道的数量;N代表普通左转车道内单个车道的最大存车数量;b为可变车道的数量。
1.2 逆向可变车道动态控制方案
1.2.1 可变车道的开启
当左转车流与直行车流都未达到饱和状态时,可通过压缩直行绿灯时间来增加左转相位时间,或将本方向信号由直行暂改为左转,以解决左转交通量较大的问题。只有当直行与左转车流同时达到饱和状态时,才考虑开启可变车道。
判断可变车道开启条件的具体步骤为:
1)通过检测器采集常规左转车道和本方向直行车道的车流数据,计算常规左转车道和直行车道的饱和度。
2)判断常规左转车道和本方向直行车道的饱和度是否均大于0.75。如果两者的饱和度都大于0.75,则开启逆向可变车道;否则,关闭逆向可变车道。
1.2.2 可变车道的关闭
若预信号绿灯关闭过早,易造成可变车道的资源浪费。直到可变车道内最后一辆车安全离开后,才可关闭预信号绿灯。因此,极限绿灯时间tmax为:

式中:g3为可变车道的道路主信号左转相位的有效绿灯时间;LJ为车辆从停车线行驶到直行冲突点所经过的距离;v2为车道内最后一辆车安全离开可变车道时的速度。
可变车道的开启时长tk既要保证在该时间段内预信号绿灯能及时关闭,又要确保可变车道内的排队车辆在该时段内能及时清空。因此,tk表达式为:

当可变车道的开启时长大于极限绿灯时间时,应关闭可变车道,具体判断步骤为:
1)根据检测器所采集的车辆到达率和第一辆进入可变车道车辆的速度,按公式(4)计算可变车道的开启时长。
2)收集检测器所采集的可变车道内最后一辆离开可变车道车辆的速度,根据公式(3)计算极限绿灯时间。
3)当可变车道开启时长小于极限绿灯时间时,继续开启可变车道;若可变车道开启时长大于极限绿灯时间,则关闭可变车道。
1.2.3 监测与诱导系统
为了获取实时数据,动态控制逆向可变车道,优化交叉口信号配时,需要完善监测与诱导系统。监测系统采用检测器采集数据[13-14]。在每个常规左转车道和直行车道入口处各设置一个检测器(检测器2~6),监测所在车道的流量,以判别是否开启可变车道,如图1所示。为在车道上埋设足够多的检测器且互相不产生干扰,采用1.7 m(长)×1.7 m(宽)的矩形线圈检测器。在可变车道入口处埋设检测器1,收集逆向左转车辆的到达率数据;在距离检测器1前方1.8 m处和可变车道的停车线处,分别埋设检测器7和检测器8,监测第一辆进入可变车道车辆和最后一辆离开可变车道车辆的速度,以判断是否关闭可变车道。
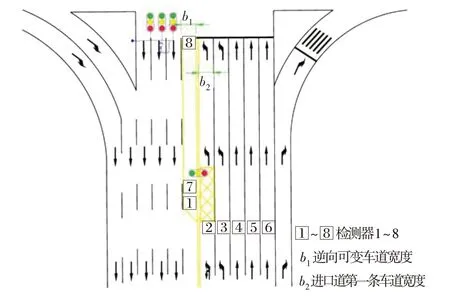
图1 检测器布设图Fig.1 Layout diagram of detectors
诱导设施主要有发光二极管(light emitting diode,简称为LED)显示板、逆向可变车道标志牌和道路指示牌[15]。LED显示板的内容设置为与预信号联动的读秒和文字指示,实现诱导的动态性与协同性。当预信号即将变为绿灯时,LED显示板会在倒数3 s后显示“允许进入可变车道”;当预信号即将变为红灯时,LED显示板会在倒数3 s后显示“禁止车辆进入可变车道”。同时,设置一个道路指示牌,标明文字“前方进入逆向可变车道,请及时按照信号换道。”
2 逆向可变车道动态控制的交叉口信号优化
2.1 交叉口车流通行规则
在交叉口南进口方向设置一个逆向可变车道,其相位相序如图2所示。交叉口的车流通行规则为:当东西方向直行时,可变车道预信号绿灯开启,车辆进入可变车道,排队等待通行;当南北方向左转时,可变车道在主信号的控制下放行排队的车流,直至主信号变为红灯。为弥补现有交叉口信号系统的缺陷,根据车流通行规则,研究可变车道动态控制的交叉口的信号优化。
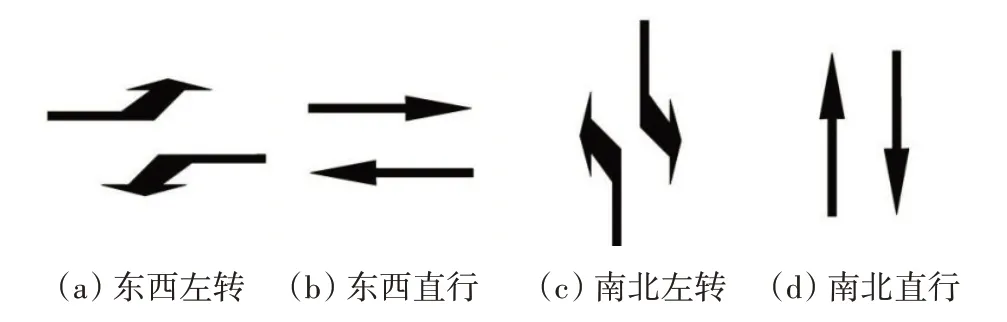
图2 交叉口的相位相序Fig.2 Phase sequences of intersection
2.2 交叉口信号优化模型
2.2.1 交叉口总的车均延误
目前,可变车道的定时研究均未根据实时车流数据来确定可变车道的动态控制方案,不能保证可变车道内的车辆在预信号的绿灯时间内一定可以安全地清空,造成了交叉口拥堵。逆向可变车道的运行仅依赖于自身与保护相位的协同控制,与其他进口道的运行关系不大。因此,为了实现对交叉口的优化,本研究选择单一相位方案作为研究背景,提出基于到达—离去曲线图的逆向可变车道的车辆延误时间计算方法。相较于其他方法,该方法的优点在于聚焦车辆延误时间建模,观测变量少且变量均可通过按图1埋设的检测器获得,方法简便,易于计算。
假设在左转设计中,包含a条常规左转车道与b条逆向车道,如图3所示。
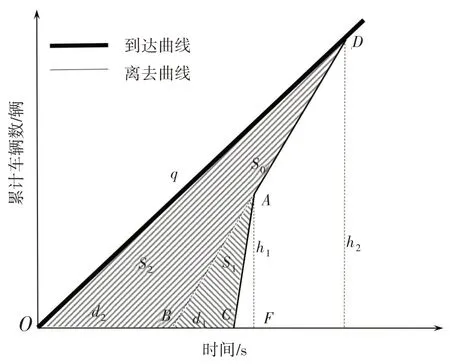
图3 交叉口左转的累计到达-离去曲线图Fig.3 Cumulative arrival-departure curve of left turn at the intersection
在图3中,O点代表左转车道车辆到达参考线的时刻,此时,参考线位于交叉口上游。D点代表在左转车道内侧车辆离开参考线的时刻,此时,参考线位于交叉口停车线。直线OD的斜率表示车辆的到达率q,直线AD的斜率表示单车道饱和流率s0,累计到达-离去曲线法默认车辆在绿灯时间内的该值为固定常数。B点是直线AD延长线与x轴的交点。T1(CF段)表示当可变车道内存在车辆时,交叉口主信号处以(a+b)倍的单车道消散流率释放在预信号时间段内可变车道与常规左转车道存储车辆所需的时间。考虑驾驶员车道选择习惯,默认可变车道的车辆数小于常规车道的车辆数。T2(FE段)表示当可变车道清空,仅在常规车道内存在车辆时,交叉口主信号处以a倍的消散流率排放剩下车辆所需要的时间。当离去曲线与到达曲线在D点相交时,表明所有排队车辆均已被清空。
图3的阴影部分为当前周期内所有左转车辆总延误时间,分为S1和S2两部分:
由△ABF与△ABC的面积,可求S1的面积,有:

式中:d1表示△ABC的底;h1表示△ABF的高;T1代表清空可变车道所需时间;T2代表可变车道清空后,在常规左转车道内的排队车辆全部被清空所需时间;T3代表为方便计算的虚拟中间变量(d1=2T1,即T3-T2=3T1)。
由△BDE与△OBD的面积,可求S2的面积,有:

式中:d2表示△OBD的底;h2表示△BDE的高。
因此,左转车道所有车辆的延误时间为:

当可变车道内的车辆清空,仅常规左转车道内存在车辆时,交叉口主信号处将以a倍的消散流率排放车辆。在此种条件下求T2,关键在于求出剩余的车辆数与消散流率的比值。红灯时间内到达的车辆减去T1时段内交叉口主信号处以(a+b)倍的单车道消散流率排放的车辆即为剩余车辆,其表达式为:

交叉口除左转车道,其他车道每个相位的延误时间均不相同,不能采用到达-离去曲线图的方法,需采用韦伯斯特延误计算方法来计算延误时间。其表达式为:

式中:C表示周期;gi表示i相位的有效绿灯时间;yij表示第i个相位在第j个进口道的流量比;qij表示第i个相位在第j个进口道的实际到达的交通量;Xij表示第i个相位在第j个进口道的饱和度。
2.2.2 模型建立及求解
1)有效绿灯时间
有效绿灯时间是交叉口信号优化研究的重要指标。当车辆在东西方向直行时,车辆进入可变车道,排队等待通行。因此,前一个相交方向直行相位的有效绿灯时间g2必需大于等于可变车道的绿灯最短提前启亮时间tmin,即:

为保证可变车道的使用率,当主信号的左转信号结束时,可变车道内的车辆应被清空。因此,主信号的有效绿灯时间g3要大于等于可变车道的清空时间T1,即:

2)车道数
可变车道的车道数量会影响左转车流的清空速度。车道数量设置如图4所示,可变车道的车道数受相同方向的直行车道数和相交方向的右转车道数的制约(可变车道的车道数要小于相同方向的直行车道数与相交方向的右转车道数之差),因此,车道数的表达式为:

图4 车道设置数量示意Fig.4 Schematic diagram of the number of lanes

式中:b为可变车道数;b1为相同方向的直行车道数;b2为相交方向的右转车道数。
3)模型建立
本研究以信号周期、相位有效绿灯时间、车道条数为约束条件,建立以交叉口车平均延误时间最小为目标的模型,获得交叉口信号控制协同优化方案。模型具体为:

利用MATLAB最优化工具箱提供的fmincon函数对该模型进行求解。
3 实例与仿真
3.1 交叉口基本情况
3.1.1 交通流量数据采集
本研究以长沙市芙蓉路与营盘路交叉口为实例,道路示意如图5所示。该交叉路口南北方向为芙蓉中路,东西方向为营盘路,主干路的左转交通流量巨大,故增设了逆向可变车道。调查时间为2020年9月21日至25日的19:40~20:40的晚高峰时段,以5 min为一个间隔,记录交叉口进口道流量数据,具体见表1。
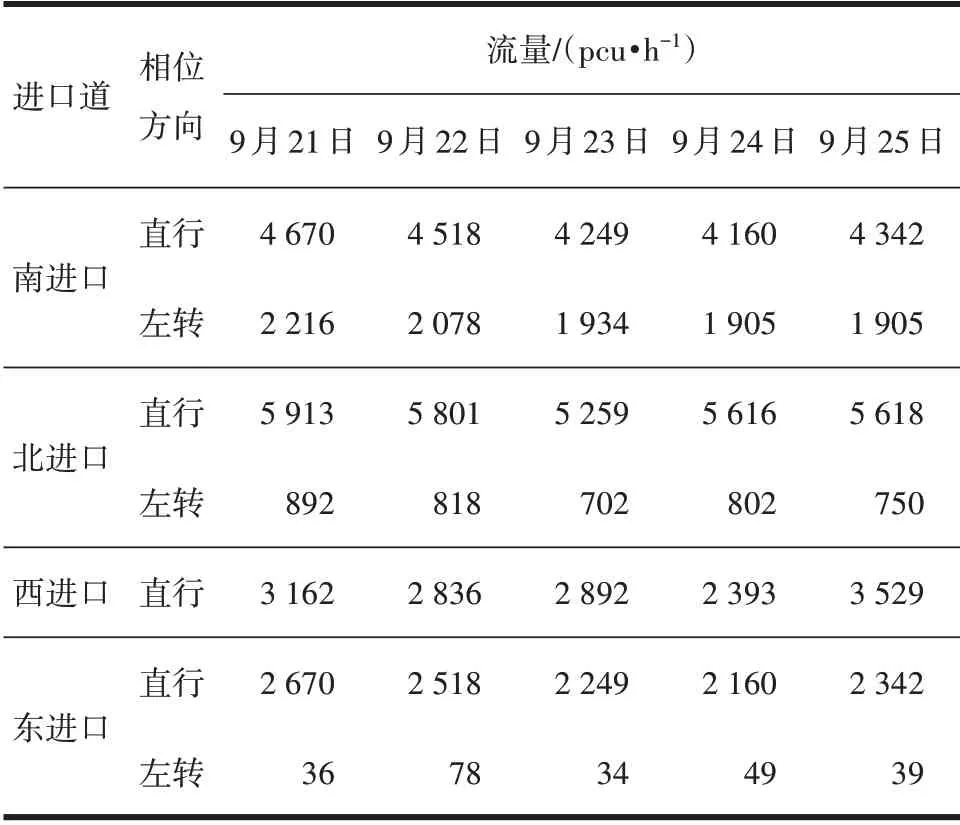
表1 交叉口流量表Table 1 Intersection traffic flow
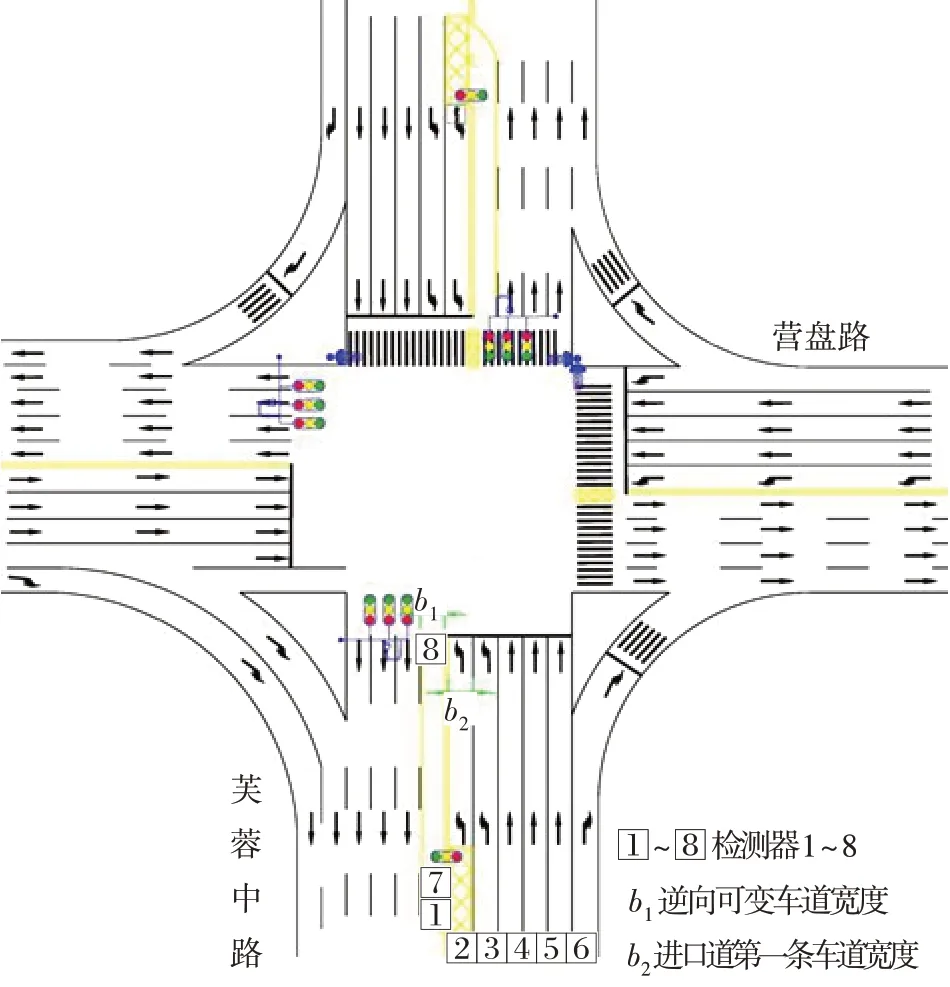
图5 芙蓉路—营盘路交叉口示意Fig.5 Schematic diagram of the Furong Road-Yingpan Road intersection
3.1.2 交叉口现状问题分析
通过计算,得到长沙市芙蓉路与营盘路交叉口的实时通行参数,见表2。

表2 交叉口参数Table 2 Intersection parameters
由表2可知,①交叉口的信号周期时长为194 s,信号配时如图6所示。南北方向左转与直行进口道饱和度仍较高,这说明该信号配时不合理,不能合理地分配各相位的绿灯时间。②交叉口采用的是预信号定时控制,预信号绿灯提前至本左转相位绿灯结束6 s时关闭,导致部分车辆在规定的清空时间内未及时通过可变车道,发生了滞留。这主要是出口预信号未实现动态控制且诱导设施不足,驾驶员不能及时预先判断导致的。
3.2 模型计算
调用MATLAB最优化工具箱的fmincon函数求解,得到优化后的信号配时参数:最佳周期为155 s,东西左转的有效绿灯时间为24 s,东西直行的有效绿灯时间为18 s,南北左转的有效绿灯时间为58 s,南北直行的有效绿灯时间为43 s。
3.3 仿真模型建立
为验证动态控制方案的有效性,以芙蓉路-营盘路交叉口作为交通背景,利用Vissim4.3软件,采用两种设置可变车道的方案进行模拟仿真。两种方案分别是定时控制方案和优化后动态控制的方案,将这两种信号配时方案输入到软件中进行分析,对比两者在交叉口的车均延误时长,左转车道与直行车道的停车次数、平均排队长度和最大排队长度方面的差异。
本次仿真车辆主要由小汽车和大客车构成,仿真时间为3 600 s,期望速度范围为20~35 km/h。该交叉口的定时方案和优化后的动态控制信号方案的配时分别如图6~7所示。

图6 定时控制信号配时Fig.6 Timing diagram of timing control signal
3.4 仿真结果分析与效果评价
从图7可以看出,可变车道动态控制方案的绿灯最短提前启亮时间为18 s,清空时间为33 s,且极少有车辆滞留情况发生。两种方案经过仿真模拟后的车道指标数据见表3。由表3可知,在车道的动态控制方案下,该交叉口车均延误减少了14.99%,左转车辆和直行车辆的停车次数分别减少了21.60%和38.25%,左转车辆和直行车辆的平均排队长度分别减少了44.07%和60.20%,左转车辆和直行车辆的最长排队长度分别减少了33.85%和19.63%。这说明采用可变车道动态控制和信号配时优化,可以极大地提高交叉口的车辆通行效率。

图7 动态控制信号配时Fig.7 Timing diagram of dynamic control signal

表3 不同控制方式下车道指标对比Table 3 Comparison of lane indicators under different control methods
4 结论
1)本研究采用了检测器来获取实时数据,对可变车道的动态控制方案进行了研究。
2)本研究建立了以交叉口车均延误时长最小为目标的优化模型,获得了交叉口可变车道的动态控制与信号控制协同优化方案。以长沙市芙蓉路营盘路为实例,将动态控制方案与现存的定时配时方案进行对比,证明该方案对解决由左转交通量大引发的交叉口延误问题有明显的提升效果。
3)实际道路中车辆的到达往往具有高度随机性,难以用单一模型进行量化。本研究提出基于到达–离去曲线法的延误模型,该模型对关键变量q的观测较为模糊,不够精细,这也是今后改进的重点。