基于图像处理的超速行驶自动提示装置
2023-01-11柯磊余仲英胡迪王竞怡冯汇东
柯磊,余仲英,胡迪,王竞怡,冯汇东
(攀枝花学院 智能制造学院,四川攀枝花,617000)
0 引言
超速行驶是指驾驶员在驾车行驶中,以超过法律、法规规定的速度进行行驶的行为。超速驾驶现象是现代交通发展历程中常见的违规现象,原因是驾驶员心理原因或者在经过两段不同限速路段的缓冲路段未仔细观察到限速交通标志而导致的危险行为。
超速行驶具有较大的危害和安全隐患,超速行驶,破坏了车辆在特定环境工作中的指数,加大了车辆的工作强度和负荷,加剧了机件的磨损和损毁。特别对车轮更是不利,跳跃性、拖滑性磨损不说,还提高了摩擦温度,轮胎极易老化和变形,引发爆胎事故。同时因为长时间超速,驾驶人对弱刺激的反应就会发生变化,对本不应作出反应的也作出反应,而对本该作出反应的反而迟迟不作反应。驾驶人在思考问题时除根据感知材料外,还得借助经验分析、判断。在变速行驶时一旦出现意外,即使当机立断也需要时间考虑,有些事故就是在作出决定的这一瞬间发生的。超速行驶时,驾驶人要集中注意前方动态,不断超车、会车。每次超车、会车都要将注意力由车外转移到车内(操作制动、离合、转向、加速)和检视仪表,在这短短几秒钟内,注意力多次转移易产生疲劳,进而引发事故。超速行驶时,超车、会车的机会增多,行驶间距缩短,车外情况应接不暇,驾驶人心理能量和重量能量消耗很多,易感到疲劳,时间一久还会瞌睡,极易引发事故。
吴豫席[1]等提出一种汽车安全带强制限速装置,由车速传感器、加速踏板传感器、电控节气门传感器、电压滤波器、强制限速装置等组成,但该装置属于被动安全装置,在主观上依旧存在缺陷和限制。韩平[2]等提出一种适用于交叉口的车辆自动限速系统,使得车辆在到达交叉口前车速被动下降,但缺乏对直线限速路段的限制和约束。宋敏[3]等提出一种基于Wi-Fi信号的无轨胶轮车自动限速装置,利用液压技术、数据通讯传输技术,电子传感技术,电子控制技术,引入控制更加可靠有效的车辆自动减速限速系统,提升运输效率,但成本过高,不适用于道路方面的私家车。周伟涛[4]提出一种基于车联网的客车限速控制装置,但制造成本过高。刘志军[5]提出一种基于ETC控制的限速装置,但由于ETC技术尚未普及到限速领域,因此面对超速行驶的现状仍需一定时间进行推广和普及。
综前所述,本文提出一种基于图像处理的超速行驶自动提示装置。利用较为普通的相机进行交通标志图像采集,将图像处理和判定结果发送到语音提示装置,对驾驶员进行超速提醒。
1 装置工作流程
装置主要由摄像头、图像处理系统、语音播放器以及实时测速仪几部分组成,由摄像头捕捉交通标志图像,发送到图像处理装置内,经过处理得到限速标志牌的限速值后,将限速值与实时测速仪的速度进行对比,若得到的速度值大于实时测速仪的数值,激活语音播放器对司机进行提醒,以此来提醒一些未观察到交通限速标志的驾驶员减速行驶,降低交通事故发生率,保障驾驶员和其他驾驶员、行人的生命财产安全,减少因为交通事故造成的经济损失。装置工作流程图如图1所示。
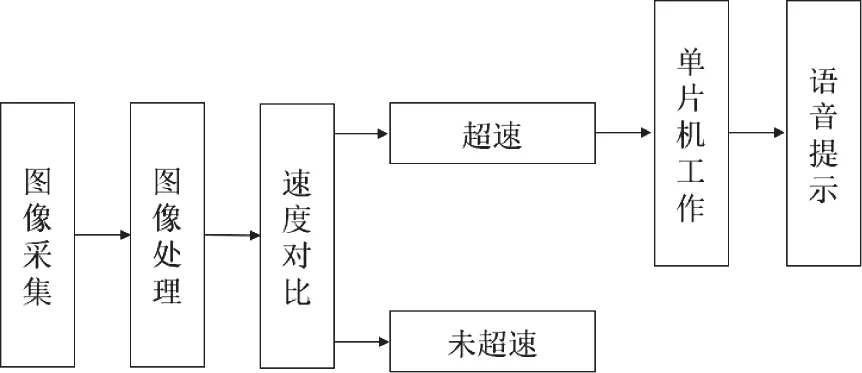
图1 装置工作流程图
2 图像处理
图像作为人类感知世界的视觉基础,是人类获取信息、表达信息和传递信息的重要手段。由于机器视觉和人眼存在一定的差异,不能像人眼一样自动识别信息,因此需要对摄像头采集得到的照片进行图像处理,得到照片中的重要信息。图像采集示意图如图2所示。
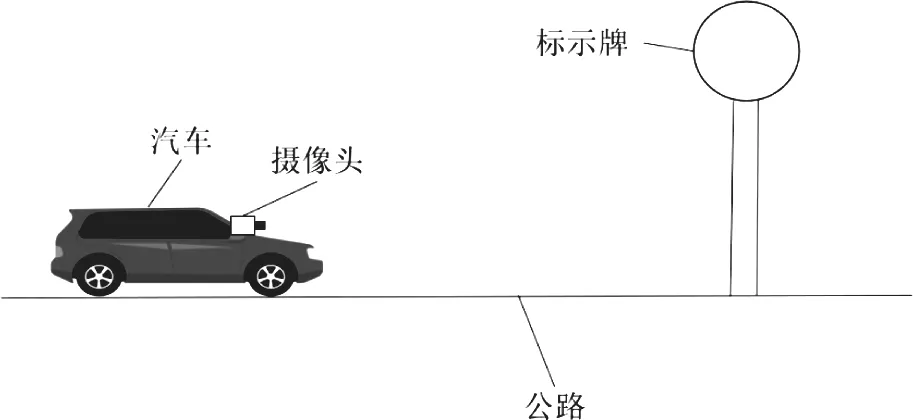
图2 图像采集示意图
2.1 图像预处理
经过摄像头采集得到的图像为RGB图像,计算机无法直接进行识别,因此需要对采集的图像进行灰度变换处理,灰度变换是图像处理中常用的一种预处理手段,通过灰度变换使得后续的图像处理更加方便。灰度变换中,图像灰度值与各颜色通道的数值关系如式(1)所示。

经过灰度变换后的图像仍存在大量的噪声,噪声会干扰图像中重要信息的提取,因此还需要对得到的灰度图像进行中值滤波去噪,中值滤波是一种非线性滤波,对于去除椒盐噪声有较好的处理效果,中值滤波也是一种经典的去噪方法,中值滤波原理示意图如图3所示。

图3 中值滤波原理示意图
2.2 图像边缘检测
经过预处理后的图像被分为了0~255共256个灰度级,而在一些灰度值急剧变化的地方存在着大量的信息,因此需要对这些区域进行边缘检测。本位采用Sobel算子边缘检测算法对灰度图像进行边缘检测,Sobel算子是一种传统的一阶边缘微分算子,常用于边缘的粗定位。其算法模板如图4所示。
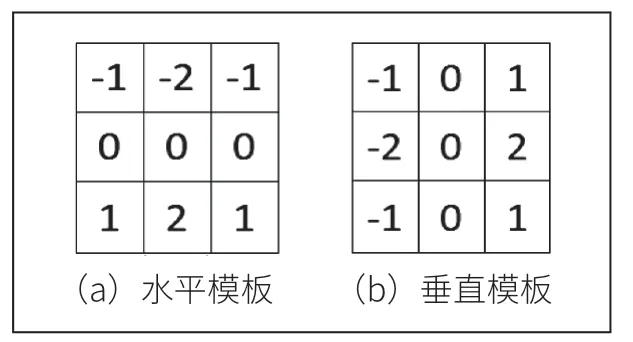
图4 Sobel算子模板
由水平模板计算梯度公式为:

由垂直模板计算梯度公式为:

各像素的梯度计算公式为:

采用上式对去噪后的灰度图像进行梯度计算,遍历每一个像素点后得到梯度结果,梯度值大的区域即为边缘的位置,表示图像中该区域灰度变化大,图像边界处的像素梯度用前一行或前一列的梯度值代替。
2.3 阈值分割
迭代阈值分割是常用的阈值分割算法,常用于图像的分割。将图像中每个像素点的梯度值与阈值进行比较,若梯度值大于阈值,则认为该像素点为目标的边缘点,将灰度值置为1;相反则判定为背景,灰度值为0。
本次图像处理在MATLAB平台进行仿真实验,经上述图像处理流程得到的图像结果如图5所示。

图5 图像处理过程效果图
对经过上述处理的图像进行特征提取和目标识别即可识别出限速标志牌的限速信息,从而能够输出限速信息与实时测速仪进行数值对比,完成超速与未超速的识别。
3 语音提示
3.1 硬件电路设计
经过图像处理流程后,计算机得到识别后的限速值,并将其与实时测速仪的速度进行对比,利用语音播放器内部单片机进行输出结果的判定与输出,当仪表速度高于图像处理的结果时,将激活语音播放器,提示司机目前车速已经超过路段的限速值,减少未仔细观察标志牌限速而超速情况的发生,进而降低交通事故发生的概率,将事故发生的可能性降低到安全数值以下,达到安全驾驶的目的。通过魏芳[7]等基于proteus的单片机实验与课程设计本文拟采用MCS-51单片机作为语音部分硬件主体结构,在Proteus软件进行仿真。仿真电路如图6所示。

图6 单片机仿真电路图
图6中R1、R2电阻值为10kΩ,R3、R4电阻值为1kΩ,R5电阻值为5.5kΩ,为保持蜂鸣器的正常工作,将其两端电压控制在2V,两个开关接地以维持电压平衡。蜂鸣器作为该电路的主要输出设备,主要起语音信号提示的作用,在确认超速的情况下,激活蜂鸣器进行工作。LED灯则是起警示作用,未超速情况下亮绿灯,超速情况下亮起红灯。各个电阻在电路结构中对所在电路支路起保护作用。电路结构中两个接地线路起转换作用,当汽车从未超速状态到超速状态后,接地线路自动转换,实现工作状态的快速变化。
由于信号通过电路和传输过程中会存在噪声干扰,因此对需要设置一个门限函数G(t)对其进行去噪处理,门限的阈值由互相关函数R(t)计算得到。假设输入信号为f1(t), 输出信号为f2(t),则得到互相关函数计算公式如下:

通过对比输入信号与输出信号的相似程度,不断调整阈值门限,并反馈继续进行计算,如此循环使得噪声完整去除为止。
当速度对比结果显示超速后将以电信号方式激励单片机工作,将设定好的语音提示信息最终通过蜂鸣器传达至驾驶员,从而达到超速提示的目的。
3.2 电路性能测试
为进一步验证硬件电路的信号传输性能和工作能力,对装置电路进行性能测试实验,拟采用正弦型信号作为输入信号,并随机加入多组脉冲噪声作为干扰信号进行性能测试,测试时间为10s,测试结果如图7所示。
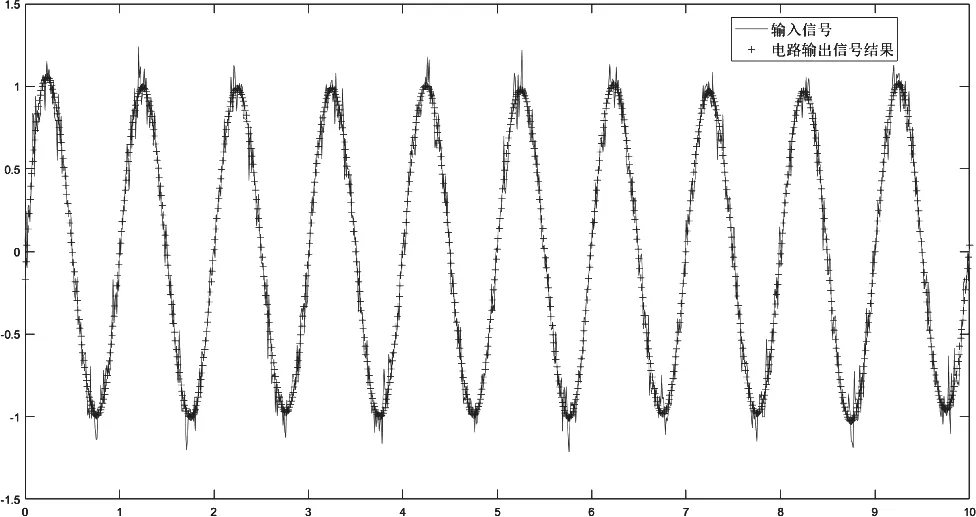
图7 电路性能测试结果
从图7性能测试结果可以看出,经过添加阈值门限后的电路结构具有较高的鲁棒性,对于随机脉冲噪声有较好的去除效果。其中,脉冲噪声大多集中在信号极值点,这是因为在非极值点处,噪声得到了电路稳定性结构的非极大值抑制,因此极值点处的噪声情况可以反映整个测试过程的噪声分布情况与噪声大小。
4 结论
本文提出的基于图像处理的超速行驶自动提示装置能够及时采集交通标志图像,得到行驶路段限速值并通过与实时测速仪测得的车辆速度进行比对,得出超速与未超速,并通过单片机控制进行超速判定的输出,激活语音播放器对司机进行超速驾驶的提醒,能够有效解决由于未仔细观察路边限速标志牌而导致超速驾驶的现象,降低交通事故的发生概率,对于超速驾驶现象较为泛滥的现状,有一定的改善作用和市场经济价值。
