基于语音及远程控制的分类垃圾桶设计
2023-01-11孔繁庭郝强
孔繁庭,郝强
(1.兰州文理学院 传媒工程学院,甘肃兰州,730000;2.福州京东方光电科技有限公司,福建福州,350300)
0 引言
随着物联网的大力发展,智能产品也越来越多。近年来,垃圾分类处理和生态保护成为我们面临的重大问题,也是全球环境保护的重要话题。我国在垃圾分类处理方面存在推行慢、设备不完善等问题。垃圾分类可以实现资源的二次利用,传统的垃圾分类主要靠人工完成,其工作量大、效率低。为了更好的实施垃圾分类,减轻环卫工人的工作量,设计一个成本低、语音控制的分类垃圾桶是非常有必要的。本文设计出一款通过单片机、语音识别模块、红外检测装置、液晶显示、APP远程控制、机械电子驱动的分类垃圾桶,成本较低,使用方便。
1 系统整体设计方案
本设计包括硬件部分设计和软件部分设计,硬件部分由单片机、红外测距传感器、蓝牙模块、语音识别模块、液晶屏、蜂鸣器、舵机等组成,软件部分主要是APP软件。由单片机、复位电路、晶振电路一起组成了单片机的最小系统,是系统的核心部分,红外测距传感器被用作测量垃圾桶盖到垃圾的距离,是判断垃圾桶状况的重要依据,蓝牙模块负责单片机与APP的通信。语音识别模块识别垃圾的种类,并且发送给单片机来控制舵机的运转,液晶屏用来显示红外测距传感器测量的数值。软件部分由APP组成,主要用于检测垃圾桶的状况,以及对垃圾桶开关盖的操作和内桶的旋转操作。设计的研究方案如图1所示。
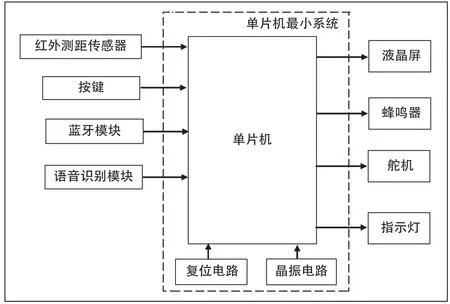
图1 系统方案
2 系统硬件设计
2.1 系统工作过程
本设计将垃圾分为干垃圾、湿垃圾、有害垃圾、可回收垃圾。通电后电路进行初始化,通过按键设置测距阈值;在不连接APP的情况下,当语音识别模块识别到关键字后,通过串口通信将数据传输至单片机,同时,红外测距传感器介入工作,将测得的数值在显示屏上显示并且与阈值进行对比,以判断垃圾桶是否打开,若测得的数值大于阈值则正常工作,单片机控制舵机完成垃圾桶盖的开启和内桶旋转操作,若测得的数值小于阈值,则垃圾桶已满,不进行垃圾桶盖的打开和内桶旋转操作。在连接APP的情况下,蓝牙模块介入工作,当蓝牙模块接收到APP的内桶旋转指令后,红外测距传感器将测得的数值与阈值比较完成后,将垃圾桶的状态通过蓝牙模块传输至APP上,在APP上显示垃圾桶的状态,同时单片机控制舵机完成垃圾桶盖的打开和内桶旋转工作;若蓝牙模块只接收到垃圾桶盖的开启和关闭指令,单片机直接控制舵机完成操作,不需要进行测距工作。
2.2 单片机系统设计
单片机最小系统是能够满足单片机电路正常工作的最基本的电路结构。STC12C5A16S2是宏晶科技最新推出的采用第六代加密技术的单片机[1],对系统的设计提供了足够的保密性,兼容了8051单片机的所有指令集,处理速度快,可以在0~35MHz的情况下工作,具有较宽的电压5.5V~3.3V/2.2~3.6V,可以采用USB直流供电,不需要额外增加供电设备,减小了开发成本。SC12C5A1T6S2单片机的最小系统由晶振电路、复位电路、电源组成。
由于STC12C5A16S2的电压为5.5V~3.3V;本设计采用USB连接线通过连接5V的移动电源或者连接5V的可插式充电头供电。
复位电路可以在通电以后让系统恢复到初始状态,在本系统中由10μF的电解电容C2与10k的电阻R2串联组成,电解电容C2的正极与电源VCC连接,电容与电阻串联节点和单片机的第9引脚相连接,最后将电阻接地。在通电以后R2对C2进行充电,在R2的限流作用下,第9引脚成为高电平;当C2充满电后第9引脚变成了低电平,完成了复位动作。
在晶振电路中C3、C4为反馈电容,为了使电路进入震荡状并且稳定工作频率,晶振的工作频率为11.0592MHz,决定了单片机的基础时钟也为11.0592MHz。单片机的工作频率和处理能力与运算速度成正比。电容C3、C4串联的节点接地。串联后与晶振并联,上端接单片机的18引脚,下端接19引脚。STC12C5A16S2单片机最小系统如图2所示。
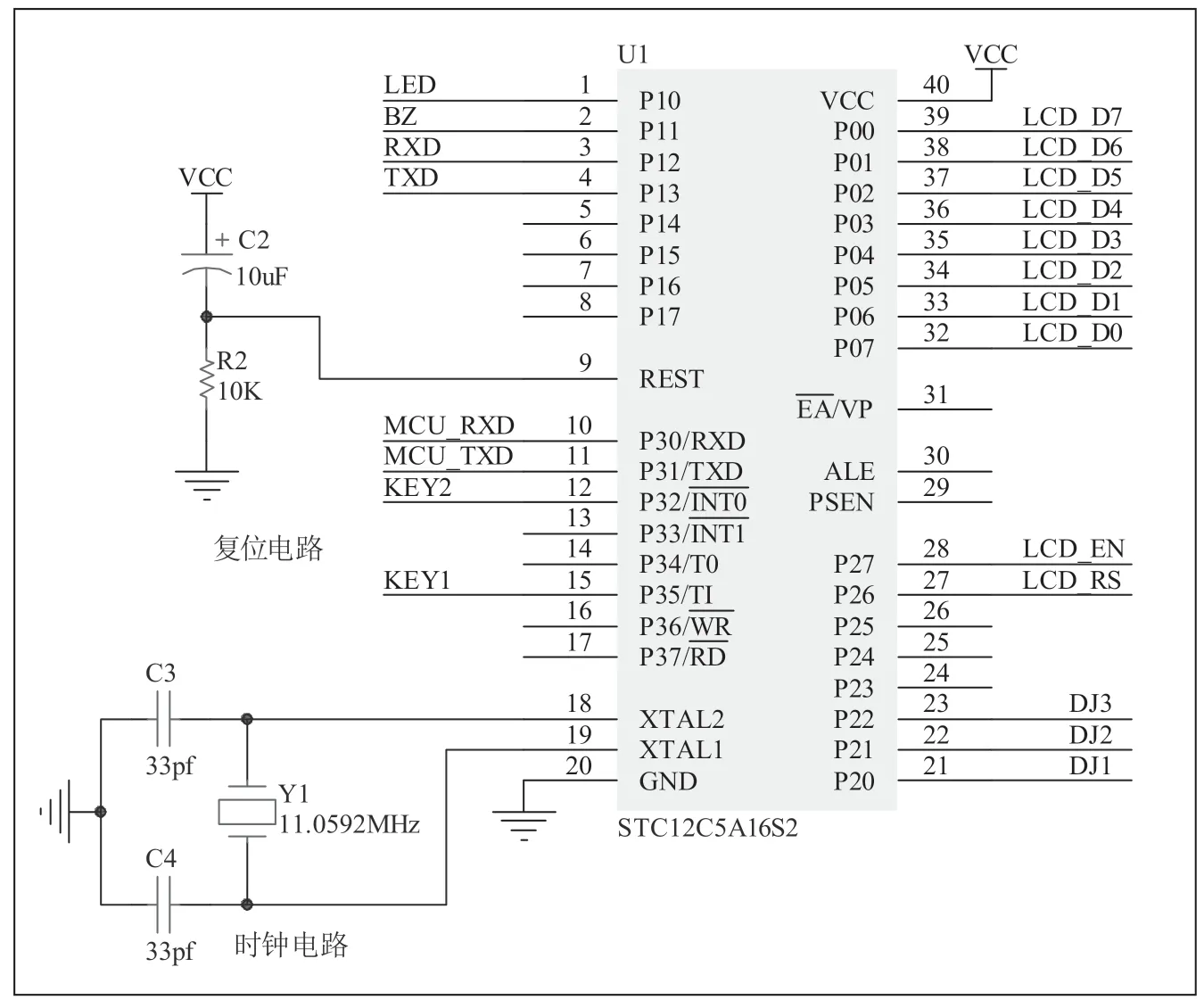
图2 STC12C5A16S2单片机最小系统
2.3 LD3320 语音识别模块设计
LD3320是一款由 ICRoute公司开发的一款“语音识别”的专用芯片,该芯片由语音识别处理器和外部电路组成。内部有数模转换、模数转换、麦克风等,在工作过程中无需外部芯片的辅助即可完成语音识别处理。LD3320可以识别任何人的话语,不是针对某一个人的识别模块,它是通过识别关键词进行处理的一款芯片,具有广大的应用范围,不拘泥于个人使用;具有功耗低、处理速度快、识别精度高等特点[2]。
LD3320是基于“关键词”识别技术开发的语音识别模块,并且可以动态编写关键词,在其内部将关键词以字符的方式进行转换。在工作过程中,当识别到语音指令后只需要与提前编写的关键词进行对比,对比成功后即可完成指令操作,避免了误操作的发生[3]。
语音识别模块的工作流程为:识别到语音后经过MIC进行频谱分析,提取识别到的关键词与提前设置的关键词列表对比并进行匹配,最终从列表中提取关键词并执行指令。在本设计中LD3320作为一个串口,利用串口通信的方式与单片机进行通信。LD3320的电路原理如图3所示。
柿子炭疽病是柿树主要病害之一,富平尖柿属于极易感染炭疽病的品种。该病在高温高湿条件下传播蔓延快,防治难度大,只有准确区分病害症状特征,了解病害发生规律,并采取综合措施适时防治,才能取得良好效果。
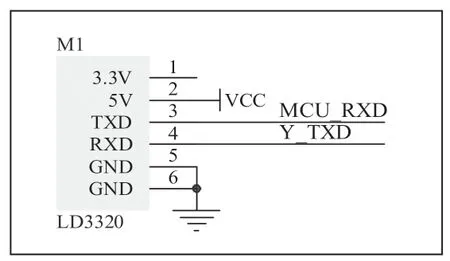
图 3 LD3320电路图
2.4 LCD1602液晶显示屏电路设计
LCD1602作为一款液晶显示屏,经常和单片机配合使用,主要是依靠单片机的控制来显示字符。LCD1602可显示字母、数字、符号、汉字等;工作过程中有两种传输模式分别为4位和8位数据传输。LCD1602内部集成了数据缓冲区DDRAM、字符发生器CGROM、CGRAM,可以使用CGRAM来存储自定义的数据[4]。LCD1602内部继承了复位电路,当电压超过4.5V时,自动初始化,显示屏将恢复默认的工作状态。
LCD1602有14引脚和16引脚2种。14引脚的为无背光低功率型,具有功耗低、电压稳定的特点。16引脚的为含绿光的显示屏,15引脚为背光正极,16引脚为背光负极;除了15、16引脚外其他引脚的功能和14引脚的无背光型一样。LCD1602的显示是通过电压来改变填充在2个平行板之间液晶分子的排列情况,进而改变显示屏的透光度来显示字符。液晶是一种极易流动的物质,只要稍加外力就可以使液晶分子流动。当断电以后没有了电场力的作用,液晶借助其自身的黏性恢复到默认状态。
在本设计采用16引脚的LCD1602,显示屏既可以用来显示设定的阈值和红外测距传感器测得的数值,也可显示4个内桶的状况。4个字母代表了不同内桶的工作状态,如果显示“Y”,则证明内桶可以正常工作;如果显示“N”,则证明内桶无法正常工作。LCD1602的电路图如图4所示。
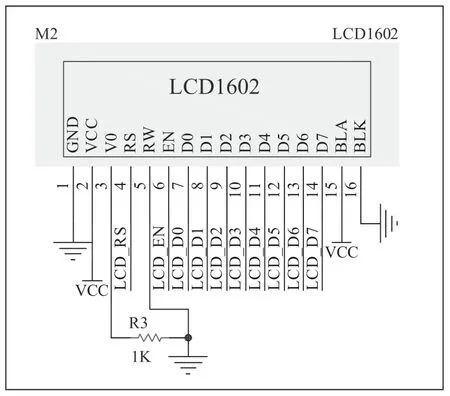
图4 LCD1602电路图
2.5 VL53L0X红外测距电路设计
VL53L0X是一款用于测距的红外传感器,工作电压为3-5V,内部集成了MCU计算模块,该芯片通过PWM、串口通信两种通信方式进行工作。与其他的芯片相比测量范围更广,可以实现0~2米以内的测量,适用于精度要求比较高的情况;其工作的最高频率为22ms,具有较低的功耗。尺寸为25mm×15.6mm,具有尺寸小、应用灵活的特点;利用内置的MCU计算距离,不需要增加外设即可实现计算,具有较高的测量精度。
VL53L0X采用仿生学原理,可以看成一个激光雷达。工作原理:利用LED光源发出激光,当激光碰到附体表面后反射回来被内置的MCU接收,经过MCU的计算求出时间差,通过一系列的计算得到精确的测量数值。该模块有2种数据读取方式,一种通过UART+PWM的方式读取,另一种是通过芯片IIC方式读取。
数据计算方法:
距离长度计算方法

VL53L0X的电路图如图5所示。
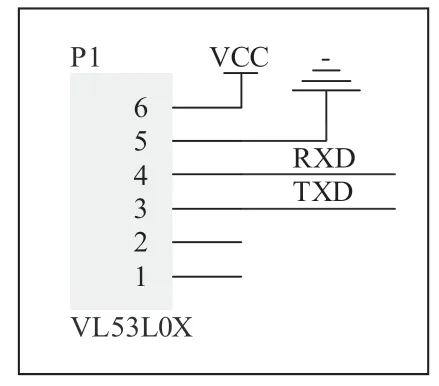
图5 VL53L0X电路图
3 系统软件设计
3.1 软件总体设计
本设计控制系统采用了STC12C5A16S2单片机,结合语音识别模块LD3320和蓝牙传输模块JDY-31对垃圾桶实现语音控制并且达到APP远程检测和操作的功能。软件方面利用C语言实现了对单片机的编程,远程控制是基于E4A平台利用易语言开发APP来实现。
具体实现的功能包括以下几点:
(1)语言识别控制垃圾桶盖的开启、关闭和内桶旋转。
(2)利用红外测距模块测量垃圾桶盖到垃圾的距离以判断垃圾桶的工作状态。
(3)通过液晶显示屏显示阈值、红外测距模块测得的数值和垃圾桶的状态。
(4)利用蓝牙模块实现单片机与APP的通信。
(5)利用蜂鸣器报警、显示屏显示“N”、APP界面等方式提醒使用者更换垃圾袋。
(6)通过LED灯的亮灭判断系统是否收到指令。
(7)利用APP对垃圾桶进行实时远程检测和控制。
3.2 软件流程图
在电源通电以后,首先进行LCD1602、定时器以及串口的初始化;然后进行距离值的读取,再判断是否有按键按下,若有按键按下,则进行设置阈值操作。若没有按键按下,则判断语音识别模块是否收到语音指令,若收到语音识别模块的指令或者收到APP的指令,则控制舵机进行相应的工作,没有收到指令将进行刷新显示操作,跳转至读取距离值。
主程序工作流程图如图6所示。
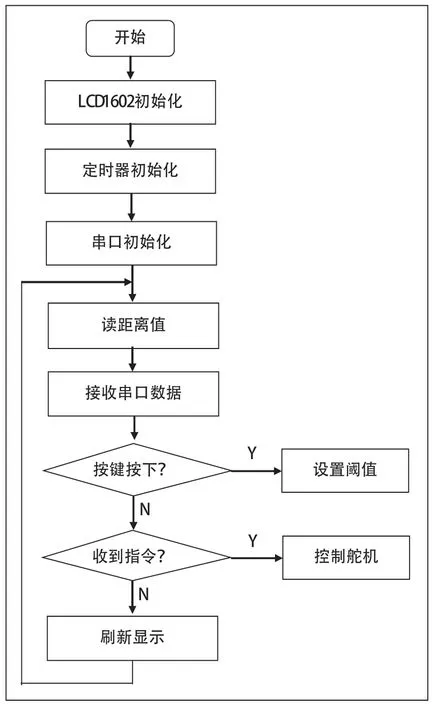
图6 主程序工作流程图
3.3 APP的功能
本设计可以采用APP实现垃圾桶的远程检测,可以通过APP的界面完成指定内桶的旋转,并且也可以显示垃圾桶的状况。当红外测距传感器测得垃圾桶已满时,APP界面会更新为已满状态;也可以通过APP来控制垃圾桶盖的开启和关闭。如果显示屏显示某一个内桶已满,APP没有更新的情况下可以通过“读状态”按键实现界面的更新。
4 系统调试
系统调试是在系统硬件检测、程序编写、APP开发完成之后,对实物进行上电测试功能。首先对单片机、LCD1602、语音识别模块的程序进行烧写,利用E4A平台开发控制APP,再将APP与蓝牙模块进行连接调试。接下来上电测试硬件电路是否正常工作,若各项功能均可以正常工作则证明硬件和软件设计成功;若个别功能无法实现,应该及时的排查不能工作的原因,针对问题制定改进方案,确保硬件电路的正常工作。
5 结论
本设计利用单片机将分类垃圾桶和语音识别结合在一起,实现了垃圾的语音控制分类。利用语音识别模块对语音信息进行提取,并且与提前设定的关键词进行匹配,从而进行垃圾桶盖的打开、关闭和内桶旋转操作,解决了以往垃圾桶需要人工操作的难题,避免了细菌感染的风险,同时,也实现了手机APP控制。语音控制的分类垃圾桶具有操作简单、效率高、实用性好等特点。
