机电系统虚实结合实验教学平台设计
2023-01-11王建新任有志鹿有杰张晓天
王建新,任有志,鹿有杰,张晓天
(河北科技大学机械工程学院,河北石家庄 050018)
教育部《关于2017—2020年开展示范性虚拟仿真实验教学项目建设的通知》要求“深入推进信息技术与高等教育实验教学的深度融合,不断加强高等教育实验教学优质资源建设与应用”。全国各高校正在根据这一要求,通过融合本校相关专业以及课程实验逐步开始探索与研究[1]。
高校机械工程学科尤为注重教育教学的实践性,而实验实训教学又是实践教学的重中之重[2]。虚实结合实验教学模式不仅解决了教学中存在的教学软硬件资源不足、教学过程安全隐患大等问题,还解决了某些实验因为场地限制、设备昂贵等因素无法开展的问题[3]。
本文将某高校机械工程学院机电类本科生的实验教学设备,引入到机电系统虚实结合实验教学平台中,构建机电系统虚实结合实验教学平台,旨在让学生在实验过程中能够更好地将课本知识应用到实践中[4]。
1 实验教学平台架构设计
1.1 实验教学平台建设目标
利用虚实结合实验教学平台,针对目前实验存在的问题,对已有教学实验设备进行开发,利用仿真系统搭建与真实实验设备相同的结构模型,通过仿真软件对模型添加相同的物理属性与功能,使机械设计与电气设计能够在仿真系统上并行开发[5]。如图1所示,虚拟平台的使用贯穿整个实验理论课程与实践课程,学生可自带电脑或在机房进行理论课程学习,在理论课程与实践课程的空白期,可以针对实验内容进行虚拟仿真操作,经虚拟仿真验证后,再对真实实验设备进行实际操作[6]。
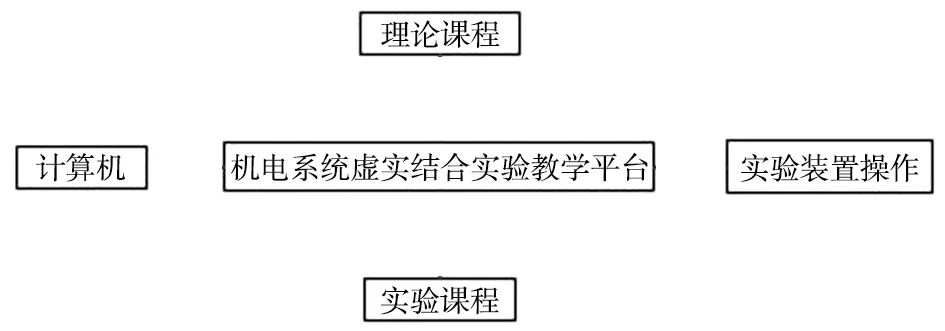
图1 虚拟仿真平台功能示意图Fig.1 Diagram of virtual simulation platform function
1.2 实验教学内容设计
虚实结合实验教学平台教学内容设计如图2所示。
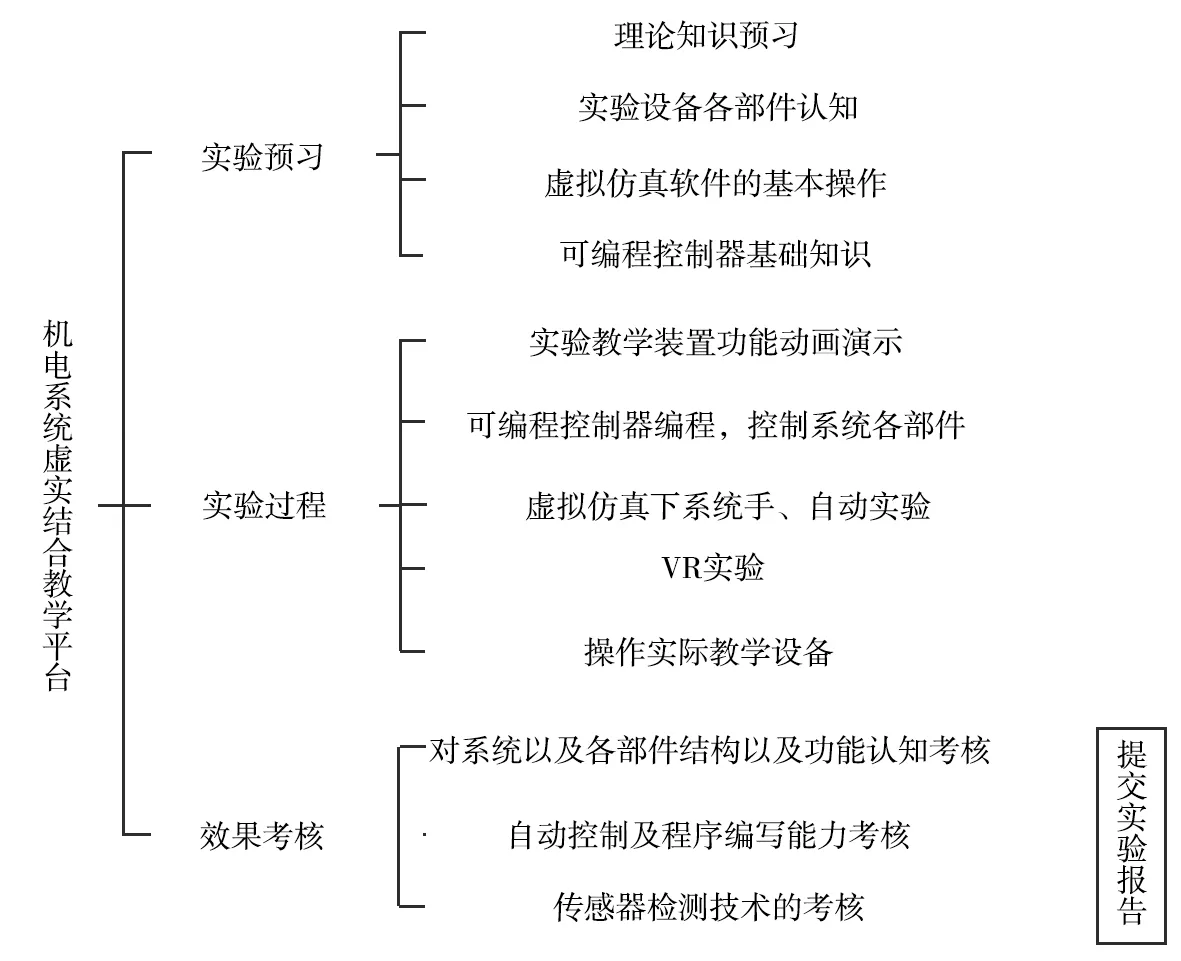
图2 虚拟仿真实验模块划分Fig.2 Division of virtual simulation experiment modules
1)虚实结合实验课程的预习 首先通过教学视频以及实验手册等了解实验设备的结构与各部分的功能,其次通过视频教程和操作说明,熟悉并掌握软件的基本操作和功能[7]。
2)虚实结合实验教学的流程 通过视频动画演示,使学生对该系统有一定程度的认知,随后逐步完成如图2所示的整体以及模块化的实验流程。
3)虚实结合实验课程的考核 通过对学生课堂上的实验过程、具体操作、知识考察及实验报告的完整度等几部分进行评定,最终完成对学生实验课程成绩的考核[8-9]。
本实验教学系统覆盖工业自动化、智能制造技术、机械电子工程、机械设计制造及其自动化、智能检测与传感技术、机器人控制技术等多个专业和学科,便于开展多学科教学内容的训练,可作为多专业实训教学系统[10]。
1.3 教学实验课程存在的问题
1)教学实验成本高,资源紧缺 尤其在地方高校受制于实验场地、实验设备采购、维护成本及实验安全条件等因素,实验课程通常采用分组分批次的方式进行,这样就会出现学生人均实验时间不足、实验内容完成度低的问题[11]。
2)实验理论课程教学方式单一 目前对于实验理论课程的传授方式依然以课堂多媒体教学为主,师生之间与教学媒介之间互动性较低,对于机械实验中机械设备复杂的机械结构不能很好地表达。
3)实验理论课程与实验实际操作课程衔接性差 目前多数高校的课程安排会出现理论与实验课程间产生空白期的问题,不能及时将理论知识在实验中进行转化巩固[12]。
2 虚实结合实验教学平台的搭建
虚实结合实验教学系统由基于虚拟运行环境的运动仿真系统、基于控制器的电气控制系统、基于Steam VR的交互系统3部分构成[13]。虚实结合实验教学系统中“虚”指的是虚拟运行环境和虚拟设备模型,而其中“实”指的是真实的PLC控制器。
2.1 虚拟运行环境的搭建
教学设备的虚拟仿真开发将在虚拟运行环境中进行,如图3所示。其开发流程如下:首先对教学实验设备进行三维建模,然后根据其二维图纸以及手动测量的方式进行建模,应用主流三维建模软件对机械结构进行三维建模,并将三维模型保存为3DXML格式,最后将建模结果导入到虚拟运行环境中。目前虚拟运行环境支持导入SolidWorks,UG,CATIA等三维建模软件模型。
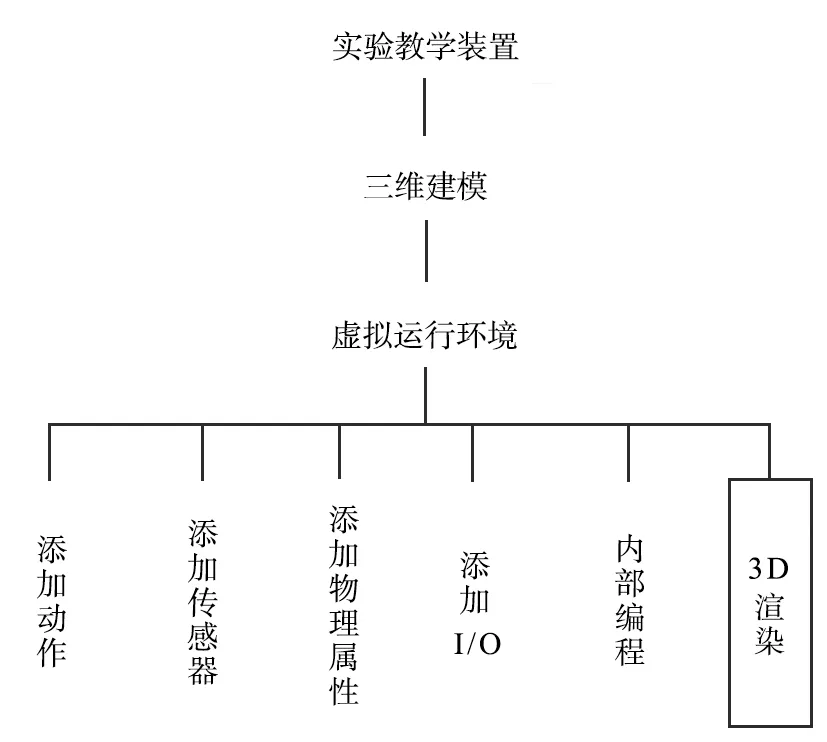
图3 虚拟运行环境的开发Fig.3 Development of virtual running environment
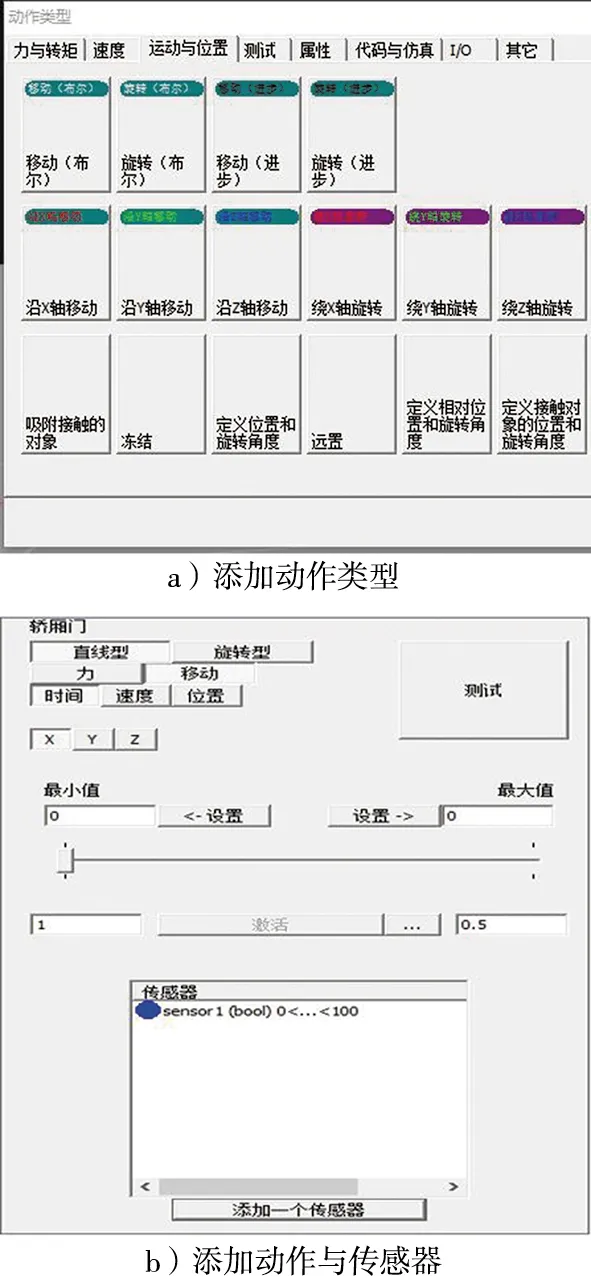
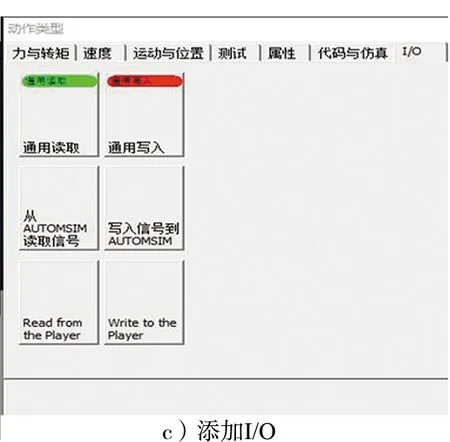
图4 动作配置界面Fig.4 Action configuration interface
如图4 a)所示,根据真实实验教学装置的功能与动作,在虚拟运行环境中对教学装置模型进行运动仿真配置,为其添加动作指令;如图4 b)所示,根据实际需要可添加直线运动、旋转运动、速度设定、加速度设定等指令,还可以添加虚拟传感器作为信号输出;如图4 c)所示,通过添加I/O实现与外部控制器的信号交互,其中可添加重力、摩擦系数、弹性系数、转动惯量、线性阻尼等各种物理属性。
对于功能动作较为复杂的实验教学设备,可采用虚拟运行环境中的虚拟控制器进行编程控制,控制器集成了多种脚本语言编辑模块,例如:BeeBasic,C语言,Python等,均可用于功能较为复杂的实验教学装置程序的编写和控制。同时集成了scratch图形化编程模块和梯形图等功能,可用于开发各种智能化、趣味性的虚拟模型,而且编程相对简单[14]。为检验外部控制器程序编写是否正确,可进行虚拟模型各部件之间的碰撞以及干涉检测,经过配置并调试后,在虚拟仿真实验教学平台中可得到与实际教学装置完全相同的功能[15]。
2.2 物理PLC与虚拟仿真运行环境的通信
通过物理PLC与虚拟仿真运行环境接口建立通信,实现物理PLC与虚拟运行环境的数字量以及模拟量的信号交互,PLC 的标准编程软件通过编写程序实现对虚拟实验设备的控制。以西门子PLC S7-200smart为例:S7-200smart与计算机通过以太网口连接,选择计算机网络协议中的Internet 协议版本4,之后查看本地网络IP地址。打开其编程软件,如图5所示建立PLC与计算机的通信连接,更改PLC的IP地址使其与本地网络IP地址的前3部分相同[16]。在虚拟运行环境中,打开菜单栏中的配置设置,将其驱动模式改为西门子S7系列PLC,IP地址设置为与PLC一致的IP地址,能够实现物理PLC与虚拟仿真运行环境的通信,如图6所示。
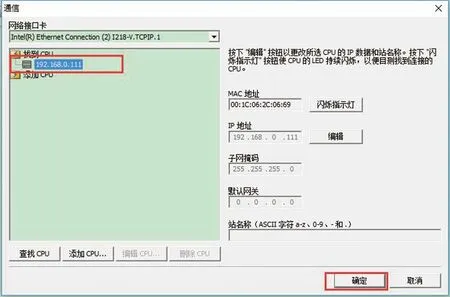
图5 PLC配置界面图Fig.5 PLC configuration interface diagram
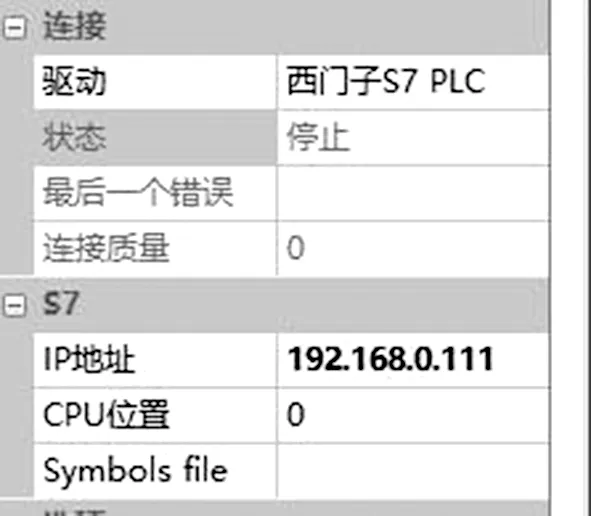
图6 虚拟运行环境配置界面Fig.6 Virtual running environment configuration interface
目前,支持与虚拟仿真运行环境建立通信的控制器包括不同品牌的PLC,例如西门子的S7-200,S7-200smart,S7-300,S7-1200等;以及三菱Q系列、FX系列以及欧姆龙系列等。本文以PLC为主,同时包括STM系列单片机、51单片机等都能够实现与虚拟仿真运行环境的通信。
2.3 VR功能的开发
基于Steam VR平台,通过2个在规定空间内进行追踪与控制的定位器,以及1个头戴式显示器,使用手持控制手柄形成1个360°全方位可交互的三维空间。本平台采用HTC VIVE虚拟设备,如图7所示。头戴式显示器通过光学信号将图像呈递到观者双眼,从而实现虚拟现实功能;定位器采用Lighthouse定位系统,其优势在于无摄像头的辅助,通过2个转轴互相垂直的旋转红外激光发射器以及头戴式显示器和控制手柄上的光敏传感器确定位置,因而允许使用者可以在规定空间内随意运动。

图7 VR显示系统Fig.7 VR display system
虚拟运行环境集成了Steam VR插件,通过虚拟运行环境运行VR功能,即可将虚拟教学装置360°可交互的三维空间展现出来,在规定空间内,学生通过头戴式显示器可以自由进入教学装置内部近距离观察教学装置的机械结构,通过控制手柄可直接对虚拟教学装置进行操作,带来沉浸式可交互的真实VR体验。
3 虚实结合实验教学平台的成果
3.1 3层电梯控制系统教学装置实例
机电实验室现有3层电梯控制系统教学设备,如图8所示。该教学装置的机械结构主要由轿厢升降系统和电梯的开关门系统2个部分组成,由升降系统的曳引电机和开关门系统的4个12 V直流电机构成动力输出部分,电气控制系统以可编程控制器西门子S7-200smart为核心,由接近传感器给出楼层到位信号以及轿厢到位前的减速信号。该教学装置很好地实现了现实电梯中自动开关门、延迟开关门、任意楼层呼叫、按逻辑呼叫等待以及检修运行等功能,如图8所示。
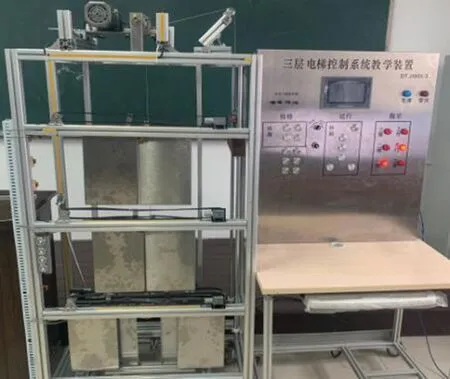
图8 3层电梯教学装置Fig.8 Three-storey elevator teaching device
将3层电梯控制系统教学装置在SolidWorks中进行三维建模,将其三维模型导入到虚拟运行环境中,如图9所示。在虚拟运行环境中添加电梯轿厢的上下行运动以及电梯门的开关门运动,并添加相应的物理属性,然后添加开关门以及楼层到位的虚拟传感器,实现与外部可编程控制器S7-200smart的信号交互,通过添加与PLC相同的IP地址与PLC建立通信,同时在虚拟教学装置左侧添加控制面板,包括电梯呼叫按钮与运行状态指示灯,仿真状态下可直接在该控制面板进行操作,功能与图9右侧控制系统完全一致。为保证虚拟电梯能够实现与实际教学装置同样的轿厢减速与开关门动作,因此在内部控制器中添加辅助程序,控制器部分程序如图10所示。
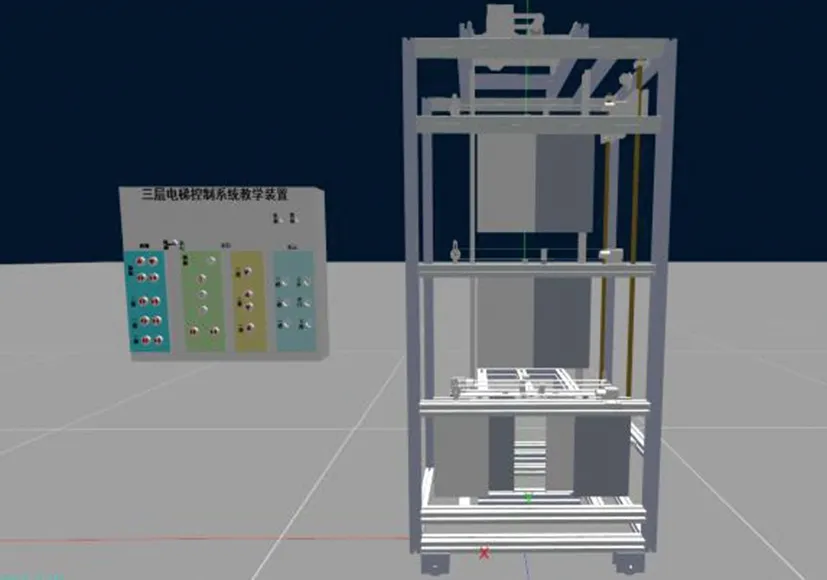
图9 3层电梯虚拟教学装置Fig.9 Three-storey elevator virtual teaching device
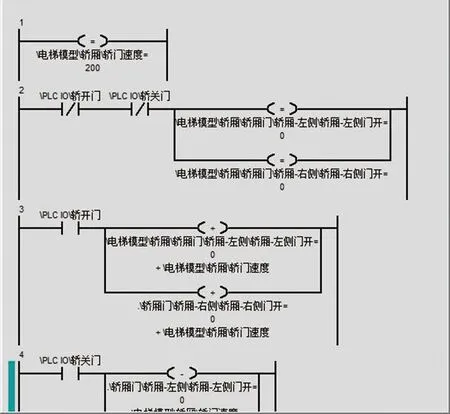
图10 控制器部分程序Fig.10 Controller part program
3层电梯虚拟控制系统共包含了5个程序块的设计,分别为电梯运行主程序块、电梯检修程序块、电梯轿厢上下行程序块、电梯运行初始化程序块、电梯及轿厢开关门程序块。部分程序示例如图11所示。
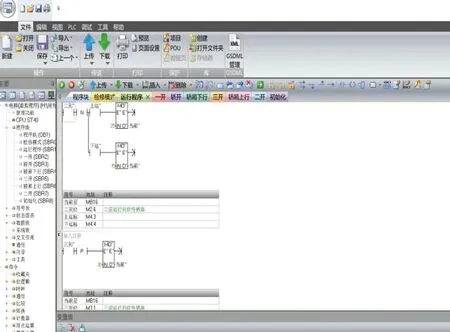
图11 虚拟控制系统部分程序示列Fig.11 Some procedures of virtual control system
在虚拟运行环境中生成VR视角,学生佩戴头戴式显示器,手持控制手柄,可直接对电梯控制面板上的按钮进行操作,并且可以近距离观察电梯的机械结构以及运行状态,获得更好的实验体验,如图12所示。虚实结合的3层电梯控制系统教学装置,将虚实结合在实验教学中加以应用,物理PLCS7-200smart可直接控制虚拟电梯,学生在对真实电梯教学系统进行编程操控实验前,对虚拟电梯进行编程控制,通过虚拟平台的干涉碰撞检测检查程序是否有误,可避免对真实教学电梯造成破环。本虚实结合的3层电梯控制系统教学装置,通过对实际电梯进行建模,分别对虚拟控制器和真实控制器的编程,实现了真实控制器和虚拟控制器对电梯模型相同的控制效果。
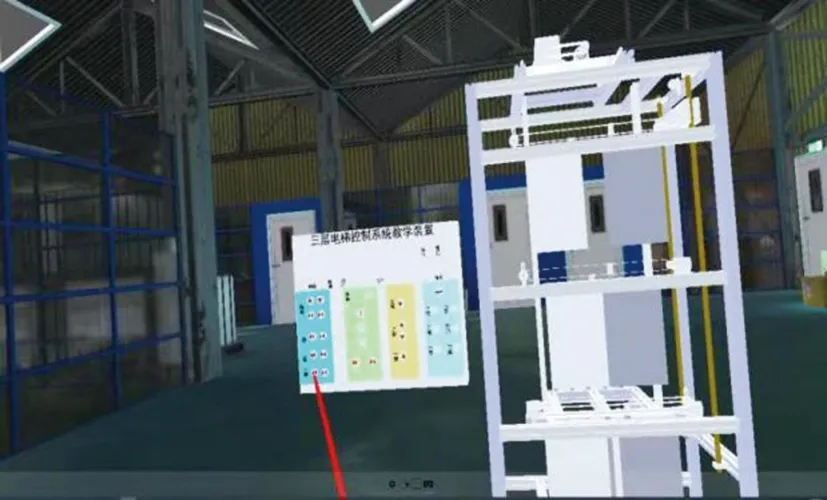
图12 VR实验Fig.12 VR experiment
3.2 柔性制造教学实训系统实例
为满足学生实训要求,在本平台中建设了虚拟工厂,如图13所示。模块化设计分为生产制造区和物流仓储区。生产制造区布置柔性生产线,放置4台ABB机器人和1台5轴数控加工中心,物流仓储区配有立体仓库、堆垛机、AGV小车和识别装置等设备,用于原材料、零部件及成品的存储。虚拟工厂中的所有教学设备都外置通信接口,可与外部物理控制器进行通信及信号交互,满足学生的编程训练。

图13 虚拟工厂Fig.13 Virtual factory
虚拟运行环境配置工业机器人模型库,只需拖曳选用相应型号的工业机器人模型,配置到仿真系统中,即可通过ABB的机器人编程软件ABB Robot-Studio对其进行离线编程与仿真,同时还可以与其他控制系统(例如PLC)进行信号交互。使用虚拟机器人解决了采购成本高、实际操作危险性高的问题。
4 结 语
机电系统虚实结合实验教学平台改变了目前传统机电类实验课程的教学实验方法,主要针对机电类专业学生的实践课程,通过虚实结合实验教学平台,学生能够更好地进行PLC的编程实训,利用虚拟平台验证程序的可行性,通过机器人编程软件ABB RobotStudio对其进行离线编程仿真,为进一步线下编程操作ABB机器人做好前期准备。
以通用控制器控制不同的虚拟教学装置,解决了在传统实验实践教学环节中的实验资源紧缺、实验设备维护成本高以及存在安全隐患的问题,虚拟实验贯穿于整个实验课程中,与真实实验互补,虚实结合,给学生带来了多层次立体化的实验感受。
但对于虚实结合的柔性制造教学系统,目前只进行了部分设备的建模和控制系统设计,该系统还有待进一步的完善。之后将对整个柔性制造系统的所有单元进行建模,根据实际功能以及物理属性,在虚拟仿真软件中赋予其相应的功能与属性,打造完整的虚拟柔性制造教学系统。
