基于红外线探测技术的透明烟草生产线异物去除系统设计
2023-01-10孔令虎罗小华陈真兴
孔令虎,罗小华,陈真兴
(湖北中烟恩施卷烟厂,湖北 恩施 445000)
0 引言
由于烟叶的数量比较多,如果单纯采用手工的方式来分拣生产线上的杂物、异物,其工作量是巨大的[1],实现过程是不太现实的,而图像处理和红外探测识别技术,在提高透明烟草生产质量方面具有重要意义,相关的透明烟草生产线异物去除系统设计方法的研究受到人们的极大重视[2]。对透明烟草生产线异物去除设计是通过图像特征分析实现的,传统方法对透明烟草生产线异物去除主要有激光分拣技术、ECO跟踪算法等[3],但采用传统方法进行透明烟草生产线异物去除的可靠性不好,辨识度水平不高,无法保证生产线生产效率。
针对上述问题,本文提出基于红外线探测技术的透明烟草生产线异物去除方法。采用红外线探测技术,处理透明烟草生产线异物红外成像,通过采集、分割并定位处理透明烟草生产线异物红外图像,实现对透明烟草生产线异物去除,展示了所提方法在提高透明烟草生产线生产效率方面的优越性能。
1 透明烟草生产线异物红外图像采集及预处理
1.1 透明烟草生产线异物红外图像采集
烟草物料首先经过一边输送一边振动的方式使其分散、均匀,然后进行加速振动输送实现物料单层化处理。此时,以生产线每个工位为序列点,以填料被制成连续卷烟条的全部时间为约束时间,采集进入匀速输送带采用点阵CCD摄像机摄取烟叶的实时图像,即采集透明烟草生产线序列图像[4],采集函数如下:
f(Gn)=mif(x,y)-(Rt,Ro)
(1)
式中:Gn表示透明烟草生产线采集率;mif表示透明烟草生产线的分布节点;x、y表示每组特征的差异性进行透明烟草生产线的大数据输出;Rt表示透明烟草生产线分量[5];Ro表示色差检测的图像采样率。根据透明烟草生产线实际运行数据,含有异物的透明烟草生产线的灰度像素值表示为
Φ(Tn)=f(Gn)Kψ+η
(2)
式中:Tn表示透明生产线异物像素值;Kψ表示边缘信息重组和空间的信息分析;η表示透明烟草生产线异物特征分布集。
其次,结合红外检测技术进行含有异物的生产线序列红外图像分析[6],透明烟草生产线异物的红外图像特征集合描述为
σ2(Z;DX)=Φ(Tn)ki+∇x
(3)
式中:Z、DX分别表示透明生产线异物红外图像的特征元素和特征点;ki表示透明烟草生产线异物红外线探测图像边缘像素点之间的欧式距离;∇x表示透明烟草生产线异物红外线探测图像的网格像素单元。结合网格区域重组方法,得到透明烟草生产线异物红外线探测图像的网格分布特征为
x=σ2(Z;DX)-(Ix+Iy)
(4)
式中:Ix表示透明烟草生产线异物红外线探测图像的区域分割阈值;Iy表示透明烟草生产线异物红外线探测图像的边缘信息分布集。为了确定异物的位置,整合网格分布特征,设透明烟草生产线异物红外线探测图像输出的图像采集为
(5)
式中:si表示透明烟草生产线异物红外线探测图像采集的迭代步数;qj表示次采集点的像素特征序列。在像素分布集中,以烟草物料输送生产线工作时间为约束条件,进行RGB特征分解,实现对透明烟草生产线异物红外线探测图像的数学建模[7]。总体实现结构如图1所示。
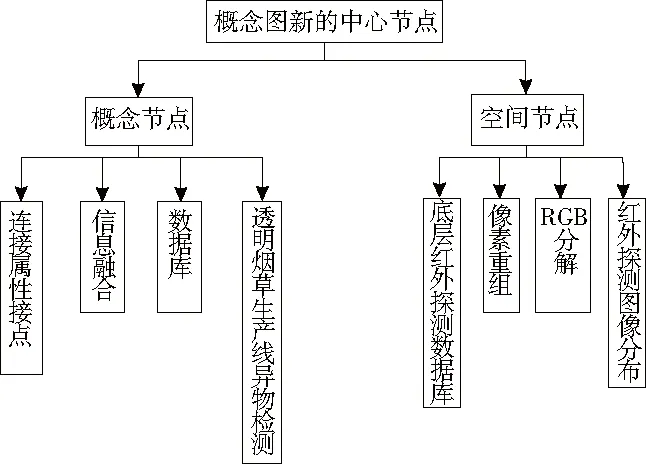
图1 透明烟草生产线异物红外线探测总体实现结构
1.2 透明烟草生产线异物红外图像降噪预处理
采用边缘像素特征增强技术实现对透明烟草生产线异物的红外特征检测,根据图像像素序列分离和自适应块特征匹配方法进行透明烟草生产线异物成像[8],得到透明烟草生产线异物特征分解的高频尺度为u(n)(x,y),透明烟草生产线异物红外线探测图像的轮廓边缘特征为
(6)
式中ω0表示透明烟草生产线异物去除信息纹理结构点。通过色彩明暗比对,色彩渲染透明烟草生产线异物红外线探测图像,透明烟草生产线异物红外线探测图像分布的中心矩为
npq=p(x,t)H(S)
(7)
式中H(S)表示透明烟草生产线异物红外线探测图像的邻域灰度值。基于多特征融合的特征检测方法,建立透明烟草生产线异物红外特征采样,得到每个块的梯度直方图为
(8)
式中Wi,j表示透明烟草生产线异物红外图像在梯度方向i和j方向的纹理信息。边缘轮廓特征检测透明烟草生产线异物信息序列,采用颜色矩来描述异物分布[9],得到异物特征分布的系数为
(9)
式中:ti表示透明烟草生产线异物红外探测图像的相似度后验估计值;ui表示像素的灰度值,其透明烟草生产线异物分布的像素差表示为
Dif(C1,C2)=Φ(Tn)-w(i,j)
(10)
式中Dif表示判别指数函数。
通过分布式检测透明烟草生产线异物,得到边缘信息传递函数为
(11)
式中:σx表示透明烟草生产线异物红外分布原始图像的边缘像素参数估计值;σy表示色差等缺陷分布特征集。建立异物去除的多维像素特征解析参数分析,利用颜色矩特征检测结果[10],得到透明烟草生产线异物红外图像降噪预处理输出为
(12)
式中:ρ(t)表示透明烟草生产线异物分布的空间谱特征量;Eint(vi)表示透明烟草生产线异物的多尺度变换参数。根据上述分析,构建透明烟草生产线异物特征辨识,提高透明烟草生产线异物红外图像降噪能力。
2 透明烟草生产线异物特征提取与去除实现
2.1 透明烟草生产线异物特征提取
采用边缘像素特征增强技术,红外特征检测透明烟草生产线异物,根据图像像素序列分离和自适应块特征匹配方法进行透明烟草生产线异物成像和特征定位及信息增强处理[11],得到红外线探测透明烟草生产线异物特征分布的模板匹配参数集为
g(x,y)=Eint(vi)+s(v)
(13)
式中:s(v)表示透明烟草生产线异物的红外特征灰度退化函数。根据图像像素级邻域检测结果,得到红外线探测透明烟草生产线异物扫描域为
(14)

x(n)=Gk+1+Fj-Gk+1
(15)
式中:Fj表示透明烟草生产线异物红外探测的异构参数匹配集;Gk+1表示异常特征分布的频谱系数,其透明烟草生产线异物图像像素级强度表示为
(16)
式中:∂ui表示透明烟草生产线异物分布的尺度;∂pi表示输入训练图像集。通过信息熵增强处理[12],得到透明烟草生产线异物分布的边缘特征提取输出为
xi(t)=D-(Xn,Yn-τ)
(17)
式中:Xn表示红外线探测透明烟草生产线异物去除函数;Yn-τ表示灰度像素分布序列。由此,建立透明烟草生产线异物成像的特征融合,通过模糊度特征匹配方法,实现对透明烟草生产线异物红外检测。
2.2 透明烟草生产线异物去除实现
根据透明烟草生产线异物的红外图谱差异性特征,采集透明烟草生产线异物特征序列[13],红外线探测透明烟草生产线异物去除的联合特征表示为
g(m,n)(u,v)=xi(t)+(φ1,φ2,…,φu)
(18)
式中:φ1表示透明烟草生产线异物图像空间转换的成像序列的标量信息;φ2表示相应的透明烟草生产线异物检测像素的特征点;φu表示纹理信息扫描点的像素值。通过红外线探测透明烟草生产线异物检测的分块匹配,得到红外线探测透明烟草生产线异物检测的量化误差为
P2=g(m,n)(u,v)-xi(t)
(19)
将训练图像集像素参数融合到透明烟草生产线异物分布中,得到异物检测输出为
(20)
式中:λ表示透明烟草生产线图像特征融合,得到红外线探测透明烟草生产线异物去除的判别函数[14];μ表示边缘轮廓线分割的序列节点,采用多维空间模块化匹配,得到透明烟草生产线异物检测输出的特征子集为
(21)
式中x、y、wi表示透明烟草生产线异物分布的融合参数。根据纹理参数估计,得到红外线探测成像序列分布集,去除透明烟草生产线异物实现信息表示为
(22)
式中:b表示透明烟草生产线异物去除的物理参数;H(z)表示红外探测的误差分布函数。综上分析,根据透明烟草生产线异物的红外图谱差异性特征,实现对透明烟草生产线异物去除。
3 仿真测试与结果分析
为了验证基于红外线探测技术的透明烟草生产线异物去除方法的有效性,以某实际透明烟草生产线现场的红外探测与异物去除设备为例,在Matlab软件平台中进行测试。实验采用配置Intel Core TM2 Duo CPU 2.94 GHz 操作系统、32.0 GB 内存、800 G 硬盘、32 位 Windows7操作系统的计算机。采用BASLER L301 bc摄像机,9.20 kHz频率,2 K分辨率,CCD作为图像传感器件。设置透明烟草生产线异物红外线探测的图像采样像素分别为245×330、480×640、640×880、968×1 295 pixel,烟草生产线异物红外图谱检测的特征权重系数为0.035 2,迭代次数为500次,生产线异物红外线探测的频率为12 Hz。将红外线探测透明烟草生产线异物检测率和去除时间作为实验指标,对基于红外线探测技术的透明烟草生产线异物去除方法的可行性进行深入验证。
3.1 异物识别能力对比
异物检测率是指在透明烟草生产线异物红外线探测的图像采样像素中,检测出存在异物的透明烟草生产线异物红外线探测的图像采样像素。异物检测率越高,则表明透明烟草生产线异物识别能力越强。根据上述实验参数设定,采用所提方法构建透明烟草生产线异物红外线探测图像输出的图像采集模型,输入采集的透明烟草生产线图像,进行透明烟草生产线异物红外线探测。分别采用基于激光分拣技术和基于ECO跟踪的异物去除方法,与所提算法进行对比,得到不同方法的红外线探测透明烟草生产线异物检测结果如图2所示。
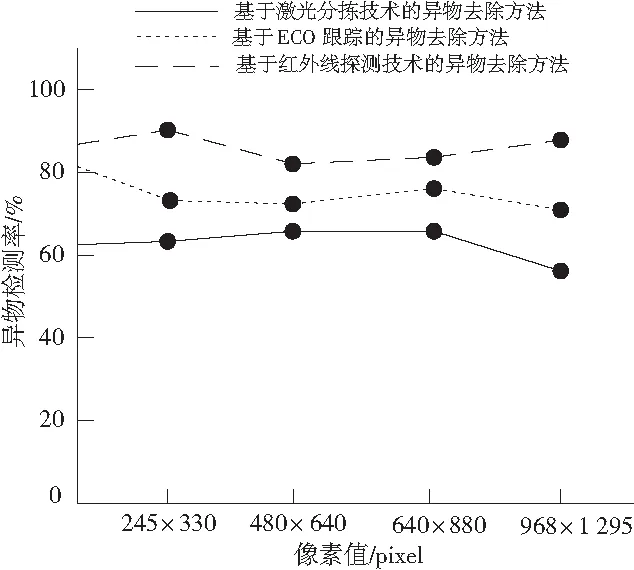
图2 不同方法的红外线探测透明烟草生产线异物检测结果
分析图2可知,针对不同的图像采样像素,基于激光分拣技术和基于ECO跟踪的异物去除方法的平均异物检测率分别为65%、73%,而基于红外线探测技术的异物去除方法的平均异物检测率高达91%。由此可知,基于红外线探测技术的异物去除方法的异物检测能力较高。因为所提方法通过红外线探测技术,分块匹配透明烟草生产线异物检测,得到透明烟草生产线异物检测量化误差,并将训练图像集像素参数融合到透明烟草生产线异物分布中,输出异物检测,从而有效地提高了透明烟草生产线异物检测能力。
3.2 异物去除效率对比
异物去除时间是指去除透明烟草生产线异物所用时间。异物去除时间越短,则表明透明烟草生产线异物去除效率越高。在此基础上,进一步验证基于红外线探测技术的透明烟草生产线异物去除效率。不同方法的透明烟草生产线异物去除时间如图3所示。
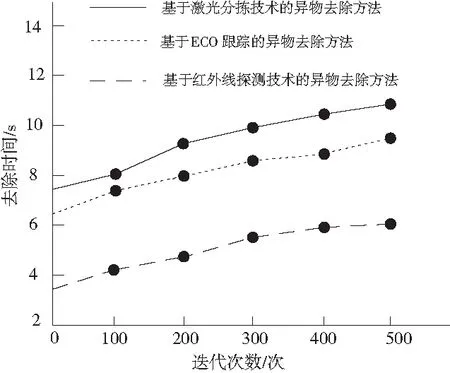
图3 不同方法的透明烟草生产线异物去除时间
根据图3可知,随着迭代次数的增加,不同方法的透明烟草生产线异物去除时间随之增加。当迭代次数为500次时,基于激光分拣技术和基于ECO跟踪的异物去除方法的异物去除时间分别为10.8 s、9.5 s,而基于红外线探测技术的异物去除方法的异物去除时间仅为6 s。由此可知,基于红外线探测技术异物去除方法的异物去除时间较短,异物去除效率较高。因为所提方法设置约束条件为烟草物料输送生产线工作时间,并分解RGB特征,构建透明烟草生产线异物红外线探测图像数学模型,从而有效缩短透明烟草生产线异物去除时间,提高异物去除效率。
4 结语
为了确保有效去除透明烟草生产线异物,提高透明烟草生产线生产效率,提出基于红外线探测技术的透明烟草生产线异物去除方法。通过红外线探测技术,建立透明烟草生产线异物分布式检测图像采集模型,采用单一特征解析方法,提取透明烟草生产线异物成像的融合特征,通过模糊度特征匹配方法,实现透明烟草生产线异物红外检测,从而有效去除透明烟草生产线异物。研究得知,所提方法的异物识别能力较强,能够有效实现透明烟草生产线异物红外线探测,提高异物去除效率。