自动扶梯梳齿板检测装置设计及有限元分析
2023-01-10张延斌封高歌甘斌梁骁施鸿均张立强
张延斌,封高歌,甘斌, 梁骁,施鸿均,张立强
(1.上海市特种设备监督检验技术研究院,上海 200026;2.上海工程技术大学,上海 201600)
0 引言
自动扶梯梳齿板保护装置是自动扶梯安全保护装置中的重要组成部分。根据国家检规《TSG T7005—2012电梯监督检验和定期检验规则——自动扶梯和自动人行道》6.2项要求[1],当有异物卡入梳齿板,并且梳齿与梯级或者踏板不能正常啮合,导致梳齿板与梯级或者踏板发生碰撞时,自动扶梯或自动人行道应当自动停止运行。据统计,发生在梯级与梳齿板间的夹人或物事故约占自动扶梯事故的 41% 以上,可见梳齿板防异物保护装置失效是造成梯级夹人或物事故最主要原因之一[2]。从风险评价的角度分析这些典型事故,有必要对梳齿板区域风险水平预判和检测有足够的重视。除了设计生产者应将这一风险有义务客观地告知设备的需方,并且要求使用管理人根据使用场合提醒做好宣传标识、相应的防护措施之外,设备的经营者给自动扶梯增加一些安全防护措施以及检测单位的提前预防性检查来提高自动扶梯的安全使用很有必要。
1 自动扶梯梳齿板保护检测装置的基本结构
《GB 16899—2011自动扶梯和自动人行道的制造与安装安全规范》[3]对梳齿板安全保护装置的安装、维护和检测均有明确要求。
自动扶梯梳齿板保护装置一般有两种动作形式,一种是水平方向动作,一种是垂直方向动作。在检验过程中发现,垂直方向动作大部分通过扳手或者螺丝刀向上翘动的方式验证[4],但这种方式往往需要很大的力才能实现,有的扳手和螺丝刀无法承受容易弯曲。水平方向动作一般把螺丝刀卡在两个梯级相交的缝隙,然后手动盘车把螺丝刀顶到梳齿板上,通过观察继电器吸合和安全回路信号灯验证,这种验证方式也需要提供很大的助推力,有可能会损坏梯级或者梳齿板,有的继电器吸合声音较小,安全回路信号灯亮度不够或者损坏,误判的可能性较大。故研究设计一种可靠的自动扶梯和自动人行道梳齿板动作开关安全检测装置,而且可以测量梳齿板水平以及垂直触发力的大小至关重要。
1.1 设计使用力的范围
现行测试方式不仅需要很多人力和物力,耗费的时间也较长,会造成在平时的维护保养过程中只测试梳齿板保护装置电气开关的有效性,不测试该装置机械动作有效性的结果。在使用过程中,如果机械部分发生卡阻,电气开关将无法被动作,一旦发生紧急情况(如梯级碰撞、小孩手被夹等),自动扶梯或人行道将不会及时停止运行,从而造成更加严重的后果[5-6]。
我国自动扶梯制造标准对梳齿板保护装置的动作力未做要求,但美国ASME A17.1—2016自动扶梯制造标准对梳齿板垂直和水平方向动作力有不同的要求,水平方向在梳齿板任一侧施加不大于1 780 N的水平力或者在梳齿板的中心施加不大于3 560 N的水平力,垂直方向在梳齿板前部的中心施加不大于670 N的垂直力。故在末端力传感器的选型上,确定水平力上限是3 560 N可测、垂直力上限是670 N可测为标准。
1.2 梳齿板保护检测装置机构设计
本单元主要介绍了自动扶梯梳齿板保护检测装置的整体设计思想和方案,描述了系统的总体结构以及校正控制系统的流程,重点研究了各部件的动作顺序以及反馈信息形成整个闭合回路的系统机制。
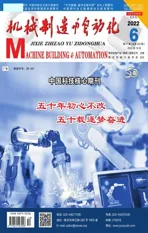
根据对梳齿板动作开关的安全检测装置动作要求,包括力的测试大小和方向,设计如图1所示的装置机构示意图。其中包括主体框架、机械螺杆推拉机构、末端测力传感器支撑板及水平和垂直力传感器。主体框架的外部设有两台测力显示器手持机。测力显示器通过信号线分别与设在推拉机构的末端水平测力传感器和垂直测力传感器相连。主体框架内设有机械推拉机构,推拉机构末端装有测力器支撑板,支撑板上分别装有水平和垂直两种压力测力器,推拉机构可以进行水平测力器位置的机械式水平前后移动,与梳齿板前端面接触并触发保护开关,完成整体框架的垂直移动同时带动垂直测力器接触梳齿板下端面进行触发开关。
1—装置框架;2—水平转动杆;3—水平螺杆头;4—传感器推拉支架;5—垂直力传感器;6—水平力传感器;7—水平力传感器支架;8—垂直螺杆头;9—水平螺杆;10—力传感器显示器;11—垂直压板;12—顶动连杆;13—垂直转动杆;14—垂直螺杆;15—固定方钢。
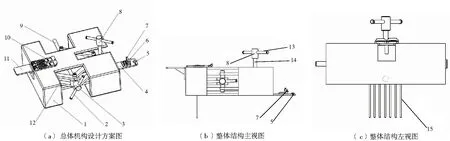
利用虚拟样机技术,基于SolidWords软件三维设计平台,对梳齿板保护检测装置进行三维参数化建模和虚拟自动扶梯的装配,见图2,并对模型的正确性和合理性进行检验。与现有的梳齿板保护检测装置相比,结构简单,易于制造与安装,提高了电梯检测的工作效率和设备工作的可靠性。
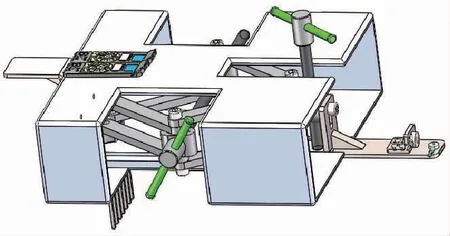
图2 结构模块三维装配图
1.3 梳齿板保护检测装置动作流程
首先使电梯处于检修状态,拆开梳齿板的前端梳齿,将固定方钢15插入梯级踏面的缝隙中。图3为检测装置与梳齿板接触时的示意图。
图3 梳齿板保护检测装置与梳齿板
以下文中表述的机构零部件及数字标识均可以在图1(a)-图1(c)中找到。通过检测装置一系列的机构运动推动末端的水平力传感器6和顶拉垂直力传感器5分别接触梳齿板的顶部端面和底部面,致使安全开关动作时显示器记录力传感器的数值。
水平和垂直的检测分两个时段。第一时段是检测水平方向的触发力,手动转动水平转动杆2,通过连接3带动水平螺杆9转动,水平螺杆头将动力方向变为顶动连杆12的水平前后的推力,推动传感器推拉支架4上的水平力传感器6顶住梳齿板的前端接触面,至安全开关动作后观察和记录水平力传感器对应显示器上的记录数值,完成水平安全开关检测和触发力大小的测量。第二时段是垂直检测触发力,待第一阶段完成后,转动调节水平转动杆2收回顶动连杆12,使水平力传感器和梳齿板前端面分离无接触,收回检测设备,重新恢复电梯运行,然后停止至检修状态。拆开梳齿板的前端梳齿,将固定方钢15插入梯级踏面的缝隙中,垂直转动杆13转动后带动垂直螺杆14垂直向下方向走,直至垂直螺杆14下端面顶到梯级的踏面,此时继续转动垂直转动杆13,由于螺杆结构的反作用力通过垂直螺杆块向反方向的垂直上方运动,同时带动连动传感器推拉支架4使垂直力传感器5接触顶起梳齿板的底面,直至安全开关动作,记录垂直力传感器对应显示器10上的记录数值,完成垂直安全开关检测和触发力大小的测量,从而实现梳齿板垂直安全开关和力的测试。
对于第二阶段失效备用方案,增加末端垂直压板11,当第二阶段较大力使得垂直转动杆13转动后,此时可采取以垂直螺杆14下端面为支点,用力向下推垂直压板11。由于杠杆作用使得另一端传感器推拉支架4的垂直力传感器5接触顶起梳齿板的底面,直至安全开关动作,记录垂直力传感器对应显示器10上的记录数值,完成垂直安全开关检测和触发力大小的测量,从而实现梳齿板垂直安全开关和力的测试。
2 有限元分析与验证
在我国现行标准规范中,对梳齿板安全开关的保护检测装置校核的方法、安全系数和许用应力没有给出明确规定,故校核压力值采用美国ASME A17.1—2016标准。强度计算和校核仍采用传统方法[7-8],将材料许用应力值与实际强度计算值进行对比,以计算和校核检测设备的安全性[6]。同时因梳齿板保护检测装置结构复杂,细小零部件繁多,局部连接处可能存在应力集中。本文设计的微型测力器安装在传感器推拉支架结构上,通过支架和螺栓固定方式进行连接,支架是力传感系统承载的重要组成部分,其承载能力是此检测装置安全性的决定性因素之一。
2.1 检测装置传感器推拉支架的有限元分析
检测装置的传感器推拉支架是个L型支架结构,是固定水平传感器和垂直传感器的连接装置,同时承载水平和垂直力传感器对外加荷载的主要承力结构,其性能也直接影响监测装置的安装及运行的可靠性及稳定性。传感器推拉支架也称测力计支撑板,以高强度的合金钢为材料,弹性模量为2.1×1011N/m2;泊松比0.3;抗拉强度为7.9×1010N/m2;屈服强度620×106N/m2。运用有限元分析软件对测力计支撑板结构受力进行一系列的性能分析,主要内容包括应力强度和位移挠度的变化,以此用于验证支撑板安装在其结构性能上的可靠性[9]。
按美国ASME标准对梳齿板垂直方向靠梳齿板的前部中心施加不大于670 N的垂直力。选择在微型测力计的固定位置施加最大670 N的垂直向下的力,在支架末端添加固定几何体夹具,然后生成高品质网络划分,且进行运行计算,得出有限元分析应力和位移形变结果。对有限元分析模型进行支架模型图以及加载外部条件和划分网格如图4所示。
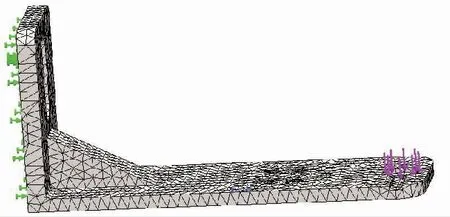
图4 支架模型图以及加载外部条件和划分网格
2.2 强度与挠度分析
图5为支架结构有限元分析静应力和位移形变结果,通过图5得到有限元分析数值(表1)。
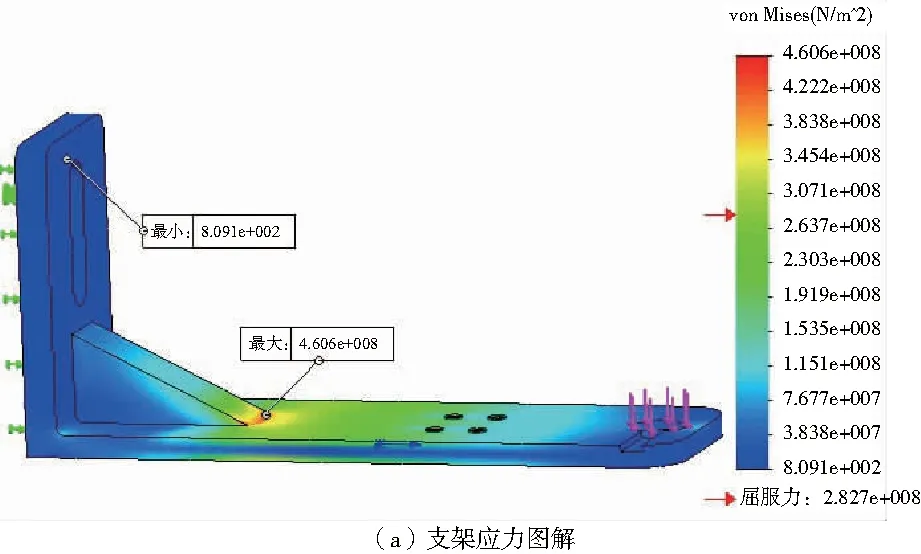
图5 支架结构有限元特性分析结果
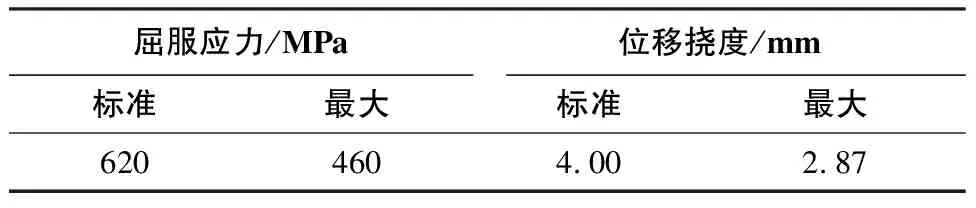
表1 有限元分析数值
由分析结果可知:
1)推拉支架最大静应力是460 MPa,高强度合金钢的应力屈服极限是620 MPa,强度满足设计安全要求的[7];
2)参照表1内相关最大数值,最大位移挠度为2.87 mm,根据《G16899—2011 5.3.3.3》标准规定,制动试验踏面表面不应产生大于4 mm的永久变形,所以挠度也满足安全设计要求;
自动扶梯梳齿板保护检测装置的传感器推拉支架模型有限元应力特性分析结果表明,根据《扶梯安全规范》[10],此L型支架结构强度、刚度都能达到安全设计规范要求。
3 结语
分析自动扶梯梳齿板保护检测现状问题,提出研究设计一种检测梳齿板安全开关动作以及作用力大小检测装置的必要性,基于虚拟样机技术对检测装置的整体结构设计,建立其整体机构三维模型。通过有限元法对检测装置的传感器推拉支架进行分析,得出应力屈服极限和挠度位移形变结果,并针对传感器推拉支架的安全设计规范及其材料特性进行比较和验证,确定方案的安全合理和有效性。