去除离群点的五轴联动机床自动标定算法研究
2023-01-10黎永杨刘远凯王科葛鹏遥黄国辉
黎永杨,刘远凯,王科,葛鹏遥,黄国辉
(1.深圳众为兴技术股份有限公司,广东 深圳 518052;2.上海新时达电气股份有限公司,上海 201802)
0 引言
五轴联动机床在传统三轴机床的基础上添加两个旋转轴,从而获得加工复杂曲面的能力,被广泛用于飞机零部件、叶轮螺旋桨等高精度工件的加工[1]。旋转刀具中心控制(rotation tool center point,RTCP)功能是五轴联动机床的关键技术指标[2],RTCP参数标定的准确性直接影响到刀尖轨迹控制的精度。
目前,国外高档五轴联动数控系统如Siemens、FANUC等配备RTCP参数测量循环系统,可以做到精密测量RTCP参数[3-4]。如Siemens 840D,其CYCLE996几何矢量标定循环,基于测针和标准球自动测量球心的三维位置来计算RTCP参数,而没有装备这种高档数控系统的五轴联动机床,只能采用传统的方法来测量RTCP参数。
传统的测量方式中,第一种方法是机床厂家在机械结构设计图样获得RTCP参数。该方法的缺点是不可避免实际机床零件加工和装配过程中产生的误差,导致获得的RTCP参数精度不高。第二种方法是手工测量的方法[4],使用检棒、百分表和方规进行手工测量。该方法存在三方面不足:1)手工测量方法的前提是默认两个旋转轴线与坐标轴平行且互相正交,实际中由于装配误差的存在,旋转轴的轴线不一定与坐标轴平行,也不一定相互正交;2)操作步骤繁琐,自动化程度低,测量结果好坏与机床测试人员经验有很大关系;3)不同的机床结构对应的测量方法不同,测量流程不具备通用性。第三种方法是采用激光跟踪仪等[5]昂贵设备进行测量,该方法可以较准确地测量出RTCP参数,但是设备安装操作复杂,成本极高,以致于难以推广。
另有黄玉彤等[6]通过数控系统驱动测针与标准球进行碰撞并锁存碰撞点的标准球球心坐标,使用最小二乘数据处理方法计算得到RTCP参数。该方案对球心数据单纯地采用最小二乘方法处理,对错误数据点很敏感,特别是使用机械式标定球时,由于人为因素难免会出现一些错误的采集数据点,进而导致该方法稳健性不足。
由此可见,一种低成本、操作简单、稳健高精的五轴联动机床RTCP参数标定方法是目前国内数控系统所缺乏的。本文针对五轴联动机床的现场标定问题,从采集的标定数据点中去除离群点后,再通过最小二乘法进行求解,获得真实有效参数值,使设计的自动标定算法成功应用于五轴联动数控机床上。
1 五轴联动机床的RTCP参数
RTCP功能使数控加工代码和编程效率得到极大提升。RTCP功能可以通过运动学变换,把基于工件坐标系的编程指令转换为机床坐标系下5个运动轴的运动指令,用户编程时无需关注5个运动轴的复杂运动[7]。RTCP参数是进行运动变换的必须参数。以图1所示双转台五轴联动机床为例,该机床包括两个旋转轴:第一旋转轴(C轴)和第二旋转轴(A轴)。工作台固连在第一旋转轴上,待标定参数为:1)第一旋转轴的轴线矢量方向;2)第一旋转轴的轴线偏移坐标;3)第二旋转轴的轴线矢量方向;4)第二旋转轴的轴线偏移坐标。
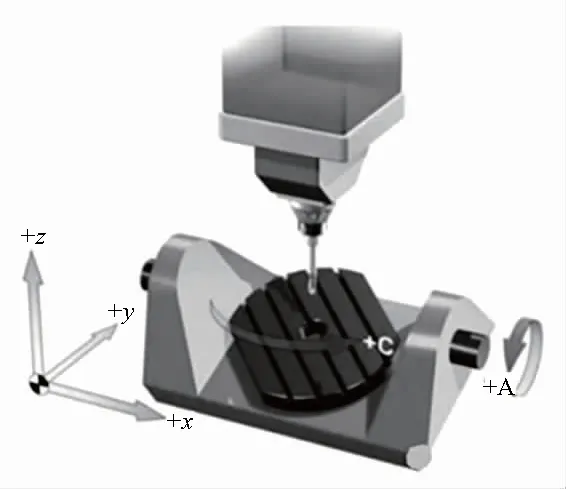
图1 双转台五轴机床结构简图
2 标定数据采集方法
2.1 仪器安装
如图2所示,主轴上安装触发式测针,C转台上通过磁座吸附标准球。用杠杆表校准测针,使测针末端小球与主轴轴线尽可能重合。
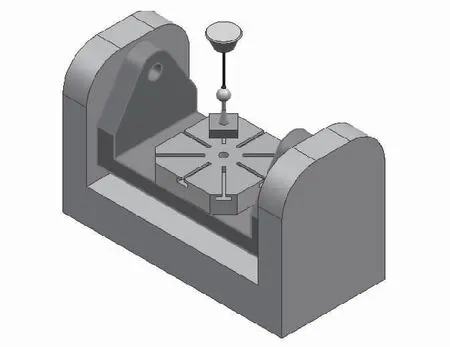
图2 标定仪器安装示意图
2.2 测量点的设置及坐标获取
机床回零后,将机床坐标清零,设置第一旋转轴对应的测量点和第二旋转轴对应的测量点,为后期进行空间圆弧拟合准备采集数据。每个旋转轴测量点的个数至少为3个。另外为提高拟合精度,要求测量点在行程范围内,并尽可能均匀分布。
假定每个旋转轴测量点坐标为12个,对于C轴,通过编程让数控系统驱动测针运动到测量点,如图3所示,驱动平动轴运动,使测针与标定球进行碰撞并锁存碰撞点机床坐标系下的x、y、z坐标值(xi,yi,zi),i=1,2,3,4,得到每个测量点对应的4个碰撞点坐标。同样的方式可以得到A轴碰撞点的坐标。
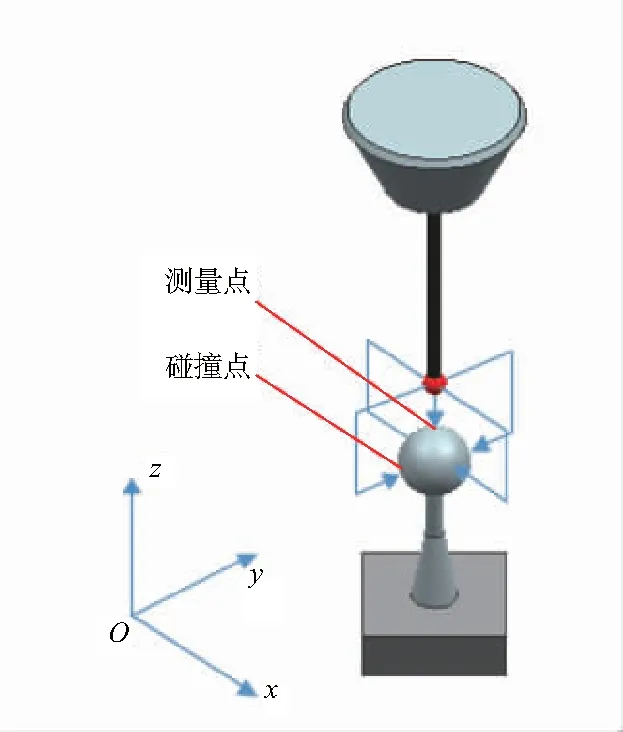
图3 测针与标准球碰撞路径示意图
3 离群点的去除方法及RTCP参数计算
3.1 轴线矢量方向计算时的离群点去除
根据第一旋转轴和第二旋转轴上每个测量点对应的4个碰撞点坐标(Xi,Yi,Zi),i=1,2,3,4,计算每个测量点对应的球心坐标(Xsj,Ysj,Zsj),j=1,2,…,12,然后从球心坐标中随机提取3个点,并判断随机提取的3个球心坐标是否共线。若随机提取的3个球心坐标不共线,计算所述3个球心坐标对应的初始平面:
ax+by+cz=d
(1)
计算每个球心坐标到式(1)所述初始平面的距离[8]:
(2)
利用方均根误差[9]受异常值影响更大的数学原理,设定计算轴线矢量方向的离群点距离阈值t为
(1)总结了与电动汽车出行路径相关的影响因素,包括电动汽车本身、道路交通以及充电站三方面的因素,有利于对电动汽车出行方案的制定。
t=2σ0
(3)
式中σ0是式(2)所述距离集的方均根误差,计算方式为
(4)

若某采样点的球心坐标到式(1)所述初始平面的距离大于式(3)所述阈值范围,则该采样点可作为离群点去除。
去除离群点后,将非离群点依据特征值法[10]进行平面拟合,即可获得第一旋转轴的轴线矢量方向Vc(Ac,Bc,Cc)。
3.2 轴线偏移坐标计算时的离群点去除
对于第一旋转轴对应的每个球心坐标在拟合平面上的投影点数据,可以依据最小二乘法原理进行圆弧拟合[11],得到初始圆心坐标(X0,Y0,Z0)和初始半径R0。计算投影点数据中每个坐标到初始圆心坐标(X0,Y0,Z0)距离与初始半径的差值ΔDi:
(5)
同样利用方均根误差[9]受异常值影响更大的数学原理,设定计算轴线偏移坐标的离群点距离阈值t1为
t1=2σ1
(6)
(7)
式中K是式(5)所述距离差值集的平均值。
若某投影点坐标到初始圆心坐标距离与初始半径的差值大于式(6)所述阈值范围,则该投影点数据可作为离群点去除。
去除离群点后,对剩余投影数据点依据最小二乘原理[11]进行圆弧拟合,获得第一旋转轴的轴线偏移坐标Cc(Xc,Yc,Zc)。
根据同样的计算原理,可获得第二旋转轴的轴线方向矢量VA(Aa,Ba,Ca)及轴线偏移坐标CA(Xa,Ya,Za)。
3.3 RTCP参数计算
通过数据采样,并去除异常离群点,获取RTCP参数的数据处理流程如图4所示。
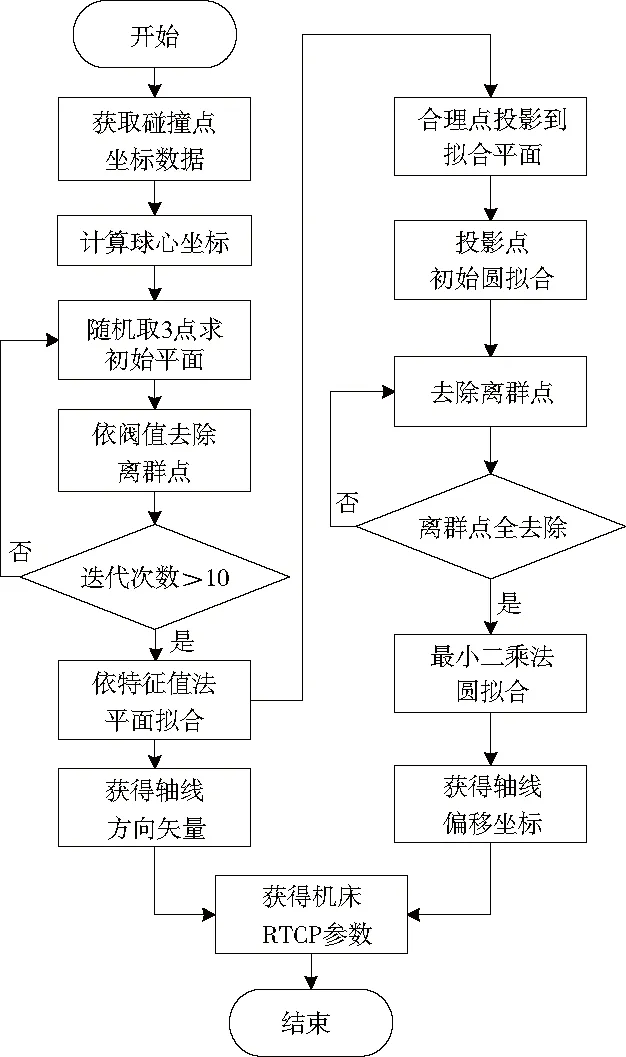
图4 离群点去除及RTCP参数计算流程
通过图4所述五轴联动机床自动标定算法计算流程,即可获得高精度的轴线偏移坐标和轴线矢量方向,为后期机床进行的高精度工件加工打下坚实基础。
4 实际实验
为了验证本算法与传统最小的二乘法计算的对比优势,基于双转台五轴联动机床进行了相关实际实验。图5是所用标定球及测针实物图。其中,测针杆长50 mm,测针的测球直径6 mm,标定球直径25 mm。图6是实验所用五轴联动机床。
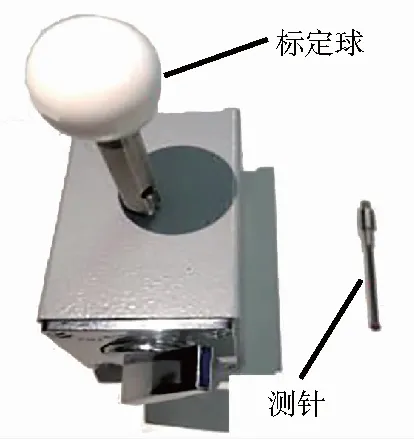
图5 标定球及测针
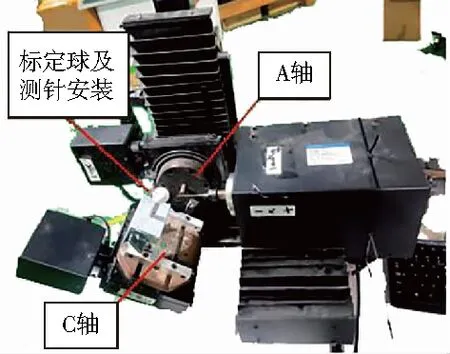
图6 双转台式五轴联动机床
图6所示的双转台五轴联动机床包括两个旋转轴:第一旋转轴(C轴)和第二旋转轴(A轴),工作台固连在第一旋转轴上。第一旋转轴和第二旋转轴上每个测量点对应的4个碰撞点坐标(Xi,Yi,Zi),i=1,2,3,4,计算每个测量点对应的球心坐标(Xsj,Ysj,Zsj),j=1,2,…,12。表1所示为第一旋转轴的测量点对应的球心坐标。

表1 第一旋转轴的测量点对应的球心坐标 单位:mm
表1所述数据通过如图4的数据处理流程,可准确识别出离群点是表1的第5点,去除离群点后可计算得到RTCP测量参数。本文所述方案得到的参数值与机床出厂参数、传统的最小二乘法测量值比较结果如表2所示。

表2 C轴拟合的轴线方向矢量及轴线偏移坐标
机床出厂值参数经过厂家校调,在此作为理想参考值用于做数据比较。与出厂值比较时利用距离误差作为评价标准,通过表2数据可得本次实验中表3所示的距离误差。

表3 对比实验测得参数与出厂值的距离误差 单位:mm
由表3数据可见,本方案获得的RTCP参数更接近真实值,是精度更高的机床参数值。将采样计算得到的圆心数据和RTCP参数,进一步使用Matlab图形数据描绘,可得如图7所示的第一旋转轴RTCP参数三维对比图。将A、C两轴的RTCP参数使用不同测算方案对比,取得如图8所示的三维对比效果图。

图7 C轴RTCP参数Mablab对比效果图
由图7、图8可见,通过采样点计算得到的球心坐标中明显存在异常离群点,本方案所述的去除离群点的五轴联动机床自动标定算法获得的拟合圆弧与真实轨迹更为贴切。
5 结语
本文以工程实际技术问题为背景,首先在五轴联动机床主轴上安装触发式测针,工作台通过磁座吸附标定球,两旋转轴在行程范围内均匀设置测量点后,驱动平动轴运动使测针与标定球进行碰撞,以获得采样点坐标;然后利用方均根误差受异常值影响更大的数学原理,合理设定离群点的去除阈值;最后依据特征值法和最小二乘法的拟合原理,获得机床RTCP参数。实验结果表明:去除离群点的五轴联动机床自动标定算法稳健性较高,可有效避免个别异常数据对标定结果的影响,可测量计算得到更高精度的RTCP参数。本文开发的标定算法已成功应用于五轴联动机床系统中,并已在高精密点胶、抛光打磨行业中投入了实际应用。
