方位远探测声波测井仪电子系统设计
2023-01-10卢俊强鞠晓东门百永刘先平杨佐新
卢俊强,鞠晓东,门百永,刘先平,杨佐新
(1.中国石油大学(北京)油气资源与探测国家重点实验室,北京102249;2.北京市地球探测与信息技术重点实验室,北京102249;3.中国石油集团测井有限公司测井技术研究院,北京100200;4.中国石油天然气集团有限公司测井技术试验基地,陕西西安710077;5.中国石油集团测井有限公司制造公司,河北任丘062550)
0 引 言
传统声波测井采用的声源主要是单极子声源和偶极子声源。单极子发射单极子接收声波测井仪器所用的单极子声源为对称声源,该类仪器在周向上无明显指向性,仅能在二维空间(轴向和径向)内对井下地层构造或者地质体进行成像,但无法确定其方位[1-3]。偶极子声源的指向性具有180°对称的“8”字特征,因此,基于该类声源的四分量偶极子声波测井技术在井下地质体方位确定方面存在一定的局限性,在方位识别上存在多解性[4-6]。远探测声波成像测井仪器能够实现对井旁远距离范围内的地层界面、孔洞或裂缝的探测[7],但现有的远探测声波成像测井仪器只是加大了径向探测的深度,仪器的方位分辨特性并未得到改进。为了解决传统单极子声源和偶极子声源的远探测声波测井无方位分辨特性或方位分辨特性有限的问题,近年来前人基于多方位接收以及传感器与电子系统集成技术,研发了具有方位探测能力的方位远探测声波测井仪器[8-11]。
方位远探测声波测井仪采用阵列化的接收器和多模式发射器[12],这种结构特点要求其电子系统具有较大规模的并行处理功能。为了提高信噪比并解决多传感器承压连接的问题,必须将传感器与电子系统进行有效集成,实现多通道功能电路的互联和同步,解决大规模阵列接收及大深度采集带来的数据量大幅度增加与电缆传输带宽有限的问题。根据仪器结构的这些特点,本文设计的仪器电子系统由主控电路、多节点接收采集电路、相控激励电路构成,电子系统各部分的互联基于主节点和多节点的模式,将电子系统设计为多个数字化功能节点,通过专用的仪器模块互联总线实现仪器内部各节点互联。
1 系统总体构成
方位远探测声波测井仪的接收站多,发射换能器工作有多种模式,电子系统复杂,对接收数据的信噪比要求高。传统的声波测井仪器结构难以满足该类仪器的需求,甚至短节连接器等部件也无法实现仪器内部各个功能电路的互联。因此,必须突破现有仪器的结构,从换能器与电子系统的高度集成化方面进行设计,最终实现有源发射声系和有源接收声系的结构设计。图1为方位远探测声波测井仪系统构成原理示意图,井下仪器由有源发射声系、隔声体、有源接收声系和主控短节构成。每个声系内部不仅装有阵列化的压电振子元件,还分别集成了对应的测控电子系统,这些高密度组装的电路与压电振子构成直接承压声系,所有声系两端均设计有过线承压盘。有源发射声系可实现交叉偶极子发射和线控单极子发射。有源接收声系包括10个接收站,每个接收站包括8个方位接收器。方位远探测声波测井仪提高了测井作业的适应性,实现了与大多数测井系统的顺利配接。基于有源发射声系和有源接收声系工作方式的不同组合,仪器可工作于单极模式(单极发射单极接收)、单极方位模式(单极发射方位接收)、交叉偶极模式(四分量偶极)、交叉偶极方位模式(交叉偶极发射方位接收),这4种模式都能实现远探测测量功能。
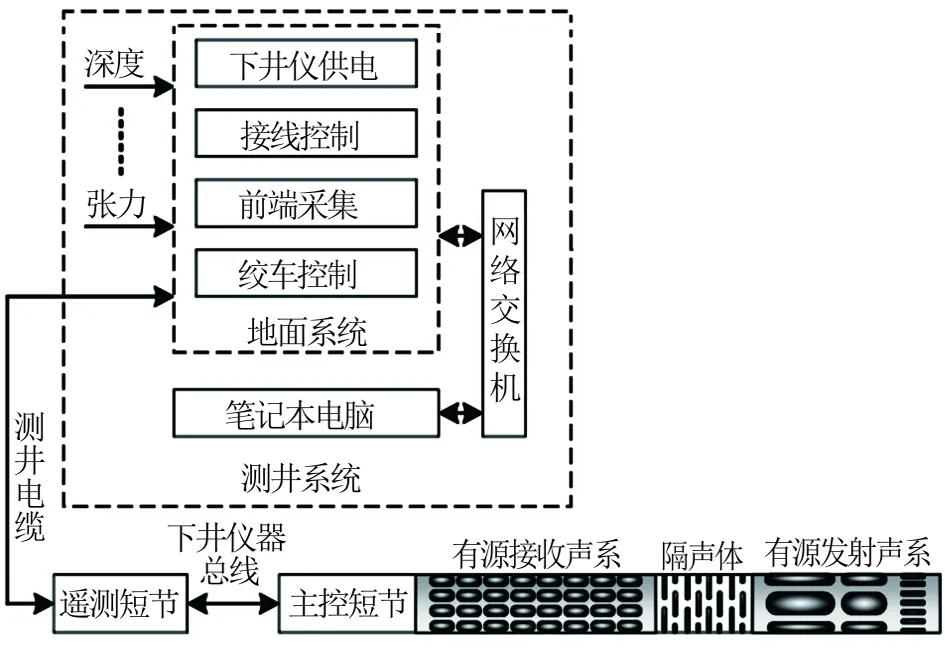
图1 方位远探测声波测井仪系统构成原理示意图
图2为方位远探测声波测井仪电子系统构成原理图,仪器电子系统由主控电路、多节点接收采集电路、相控激励电路构成,实现了换能器激励、信号接收放大、模式选择、有源滤波、数据采集和数据通讯等功能。方位远探测声波测井仪采用多个数字化功能子模块(如相控激励,方位接收站等)组成整个电子系统,仪器电子系统互联是实现数字化功能化子模块管理的重要环节,为此,设计了一种专用的仪器模块互联总线(Tool Module Bus,TMB)。为了提高接收信号的信噪比、完成仪器各部分电路的连接并有利于仪器的升级扩展,设计了由多个有源接收站(也称为采集节点)构成的有源接收声系,每个有源接收站包括方位接收换能器和处理电路,方位接收波形经有源接收站处理后转化为数字化结果,有源接收站通过仪器模块互联总线发送采集数据并接收控制命令。通过仪器模块互联总线完成了主控电路与多个接收采集电路和相控激励电路的连接,该通讯总线是一种由时钟和数据构成的高速串行总线,占用的连接资源较少,解决了井下仪器系统内部各个功能模块的高速通讯。可以看出,仪器电子系统的这种结构和通讯方式在理论上可以连接多个采集和发射节点,为仪器的功能扩展提供了可能。
图3为方位远探测声波测井仪遥测系统接口构成原理图,仪器的遥测接口以数字信号处理器(Digital Signal Processing,DSP)和现场可编程门阵列(Field Programmable Gate Array,FPGA)为核心控制电路,设计了多种接口方式,通过控制器局域网(Controller Area Network,CAN)总线接口引擎可与中国石油集团测井有限公司的CPLog测井系统进行互联。同时,设计了以太网(IEEE802.3)接口,能够与当前基于Ethernet互联的其他高速遥测系统挂接,传输较大批量的数据,有利于地面系统对测井数据进行实时处理,得到更多的工程参数。

图2 方位远探测声波测井仪电子系统构成原理图

图3 方位远探测声波测井仪遥测系统接口构成原理图
2 多节点接收采集电路
有源接收声系采用直接承压有源阵列结构,共包括80个片状宽带接收换能器单元。每个片状宽带接收换能器单元都使用独立的信号调理和数据采集通道,共80个通道,每个通道的增益动态调节范围为0~90 dB,16位的模拟数字转换器(Analog to Digital Converter,ADC)全并行同步采集,整个有源接收声系通过多个独立的数字化节点与仪器模块互联总线相连。
图4为多节点接收采集电路的单个接收采集节点原理示意图,主要包括前置放大、程控放大、有源滤波、多通道同步数据采集、数据采集控制、缓存和节点通讯控制这7个模块。接收换能器的任何一路均可进行独立的放大、滤波等模拟处理和数据采集。

图4 多节点接收采集电路的单个接收采集节点原理示意图
方位远探测声波测井仪的全部有源接收站同步工作,获得接收阵列的时域波形信号序列。仪器的数据采集通道能对所有信号进行16位高速全并行同步数据采集,每秒最多有500千次采样,前端和公共放大器提供量程为90 dB、步进为6 dB的程控放大能力,每个放大通道均可独立受控。通过实时增益控制和多级有源滤波,能够在较大动态范围内获得最佳信噪比。
方位远探测声波测井仪在井中径向探测距离较远,具有8个方位的周向探测能力,要求仪器能够具备多通道、大数据量并行的数据采集功能,仪器的实时数据缓存空间要与数据的采集和处理匹配。仪器在每个深度点可同时工作于单极方位模式和交叉偶极方位模式,产生的数据量为每个深度点480 kB。
3 主控电路
主控电路是仪器的控制中心,采用典型的嵌入式架构(见图5)。主控电路主要由核心DSP、SRAM(Static Random-Access Memory)、FLASH存储器、仪器通讯控制器、井下仪器总线控制器及链路接口等模块构成。

图5 主控电路原理示意图
主控电路采用具有32位定点和32位浮点处理功能的高速DSP作为主控元件,完成仪器控制和本地数据处理。采用百万门级FPGA作为系统控制逻辑,实现仪器模块互联总线主控节点的功能和井下仪器总线接口的控制。方位远探测声波测井仪可通过CAN接口引擎和以太网(IEEE802.3)接口与遥测短节挂接,实现与井下仪器串的系统互联。
仪器模块互联总线的特点是采用了“一主多从”的总线式多点互联方式,主控节点由仪器主控电路承担。工作时主节点与某从节点形成一对一的连接,其余的从节点处于挂起状态,这种主节点主动的方式能够完全避免总线竞争,从而有效地利用信道带宽提高数据传输效率。主控节点可通过广播方式同时对所有子节点发布命令,以获得系统内多个子模块对激励和采集的时间同步。
方位远探测声波测井仪典型的深度采样间隔是20 cm,当测井速度为400 m/h,每个深度点典型数据量为480 kB,则对应的理论数据传输速率要求为4.3 Mbit/s,但当前的测井电缆数据传输速率无法满足此要求,采用存储容量大、可靠性高的FLASH存储器进行井下数据存储是一种有效的解决方案。
4 相控激励电路
有源发射声系包括发射器和相控激励电路,发射器分为单极和偶极,单极可以工作于相控线阵模式,偶极可以工作于正交激励模式。图6为相控激励电路的原理示意图。
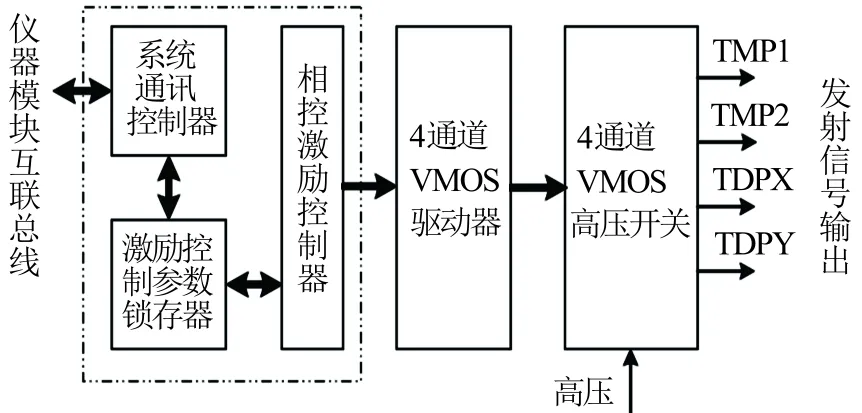
图6 相控激励电路原理示意图
系统通讯控制器是一个独立的通讯节点,实现与主控电路的双向连接;激励控制参数锁存器对接收到的控制命令进行译码并生成控制参数,同时给系统主控节点发送该节点的状态;相控激励控制器根据接收到的激励控制参数产生单极子换能器的相控激励时序信号,并根据工作模式确定偶极子换能器的激励控制脉冲;4通道VMOS驱动器和4通道VMOS大功率高压开关对相控激励控制器产生的激励控制脉冲进行驱动放大,并产生高压激励信号驱动发射换能器。通过对压电振子和相控激励电路的优化设计,可使仪器能够在更长的源距和更宽的频带下工作,以获得高质量的井筒模式波。
相控激励电路能够实现对单极和偶极换能器的大功率激励。单极激励可以工作于相控线阵模式,为了提高仪器的可靠性,减小仪器电路的规模,设计了由两组单极换能器构成的相控线阵激励系统,该激励系统由两个相控线阵激励通道进行控制。这两个相控线阵激励通道的电路结构完全相同,相控激励由两个通道输出的激励驱动信号的相对相位差实现,该信号的相对相位差可由地面系统进行实时控制,系统通讯控制器接收到控制信号后译码为激励信号相位差控制参数,通过相控激励控制器输出具有相对相位差的激励驱动信号,从而实现两个通道的相控线阵激励。
5 测试实例
方位远探测声波测井仪在塔里木油田、大港油田多个区块开展了多井次测试,均取得了合格的现场测试资料。图7为仪器在塔里木油田某井测量得到的单极方位模式下的数据,测量深度范围约为X 910~X 010 m,共计100 m,测量时采用了井下存储、地面监测的快速测量模式。图7的第1道为方位和伽马测井曲线,第3道到第10道为最小源距接收站的8个方位接收器分别接收到的波形。图8为测量该井得到的最小源距接收站第1个方位接收器在某个深度点的测量波形。
从图7和图8可见,声波信号信噪比高,首波到达之前的基线几乎没有干扰,模式波特征清楚,模式波后边的其他波形(包括可能存在的反射波)幅度明显减小,波形幅度随着径向距离的增大按照指数规律减小,但是测量距离最远的波的形态依然非常清晰,有利于波形资料的处理及对远距离地质体的成像。同时,在单极方位模式下仪器测量数据的时间范围为0~16 ms,测量井段的纵波声速约为5 000 m/s,测量深度约达40 m。仪器在交叉偶极模式下的测量数据的时间范围为0~32 ms,对应的探测深度要大于单极方位模式下的探测深度。仪器的测控电子系统满足方位远探测声波测井仪的测量要求,能够为仪器在多方位、大探测深度测量场景下提供可靠且高信噪比的测量数据。

图7 单极方位模式下的测井数据

图8 单道单深度点测量数据
6 结 论
(1)方位远探测声波测井仪采用了有源发射声系和有源接收声系的结构,这种结构对应的电子系统比较复杂,该文设计了基于主节点和多个子节点互联的仪器电子系统。每个节点对应一个数字化功能模块,通过专用的仪器模块互联总线实现电子系统各个节点之间的互联。这种井下仪器内部的多节点连接方式解决了具有阵列化传感器的井下仪器互联的难题,有利于仪器功能的升级扩展,为仪器进行多功能组合测量提供了可能。
(2)方位远探测声波测井仪的电子系统以DSP和FPGA为核心控制电路,设计了多种接口方式,实现与现有主流遥测系统的互联,扩展了仪器的适用性。采用容量大、可靠性高的FLASH井下数据存储器解决遥测电缆传输带宽的限制,提高了仪器测量的时效性。
(3)多节点接收采集电路包含多个并行接收采集处理通道,为每个通道提供了大容量波形数据缓存空间,实现了多方位阵列化远探测声波接收信号的并行处理和采集。
(4)方位远探测声波测井仪电子系统与阵列化传感器的有源集成结构为其他类型测井仪器,特别是成像类声波测井仪器的研发提供了可参考的解决方案。
