高阶微分反馈控制及在四旋翼飞行器中的应用
2023-01-10李霞齐国元郭曦彤赵旭
李霞,齐国元,郭曦彤,赵旭
1. 天津工业大学 机械工程学院,天津 300387
2. 天津工业大学 天津市电气装备智能控制重点实验室,天津 300387
四旋翼飞行器以其体积小,灵活度高,易于操控等优点被广泛应用于军事和民用等领域[1-2]。近年来,基于飞行器的集群技术也吸引了越来越多研究者的关注[3]。在飞行器实现自主避障及编队等集群协同任务过程中,单个飞行器的控制精度和响应速度等影响着集群控制的效果,因此单个飞行器的高性能控制尤为重要。
四旋翼飞行器(Quadrotor Unmanned Aerial Vehicle, QUAV)是典型的欠驱动系统,动力学模型具有强耦合性、非线性且开环不稳定特点。尤其是其姿态系统,如果没有有效的控制,会产生复杂的动力学,甚至混沌振荡行为[4-5]。飞行器实际的飞行环境复杂多变,系统结构参数和动力系统参数时刻变化,且容易受到阵风等未知扰动的影响,因此很难建立其精确的数学模型[1]。目前市场上的四旋翼飞行器产品大多还是采用经典的PID控制,主要原因在于它只依赖系统的输入输出数据,不需要系统内部状态已知或可测,且不依赖系统精确的数学模型。但是,PID参数整定一直是个问题,另外,系统未知不确定项,外界扰动等信息都没有在PID控制器中考虑和引入,甚至已知的模型也被忽略,容易产生稳态误差,出现暂态跟踪超调过大等问题。因此,PID在系统受未知扰动影响时鲁棒性就会变差[6]。针对旋翼飞行器模型不精确且易受未知扰动影响的特点,很多学者提出了不依赖系统精确数学模型,并具有抗干扰能力的控制算法。
鲜斌等[1,7]采用基于侵入-不变集(Immersion and Invariance, I&I)原理的自适应算法估计飞行器模型中的非线性化参数,并设计误差符号函数积分的鲁棒控制方法抑制未知扰动和补偿估计偏差,实现飞行器的稳定控制。Zhang等[8]采用基于模糊估计器的自适应模糊量化控制方案,实现四旋翼飞行器的位姿跟踪控制。仅依赖系统输入输出数据的数据驱动控制技术,如自适应动态规划,强化学习,无模型自适应控制和迭代学习控制等[9-12]也被成功应用于模型具有不确定性和受外部扰动的四旋翼飞行器控制中,提高了系统的鲁棒性。此外,基于扰动观测器的不依赖模型控制策略,通过设计观测器估计系统的未知扰动,也被广泛应用于飞行器系统的控制器设计中[13-15]。其中具有代表性的是由韩京清[16]提出的自抗扰控制器(Active Disturbance Rejection Control, ADRC),高志强[17]将其线性化后促进了自抗扰控制器的推广应用,目前已逐渐发展成熟为一种可用的工业控制策略。文献[18-21]采用自抗扰控制器抑制系统所受的内外扰动实现了飞行器位姿的鲁棒控制。
作为自抗扰控制器的核心部分,扩张状态观测器(Extended State Observer, ESO)的估计精度影响着系统的控制性能。郭宝珠等[22-23]对ESO的收敛性进行了证明,表明当总扰动及总扰动的导数有界时,增加观测器带宽能保证估计误差收敛到有界值。陈增强等在文献[24]中指出,增加带宽会引入测量信号的高频噪声,实际系统中不适宜选取高增益的观测器参数。Qi等[25]证明了当总扰动为抛物线及更高阶次信号时,ESO的收敛性是不能通过增加带宽改善的,并指出了其估计精度受限的具体原因。
Qi等[26]提出了高阶微分反馈控制器(High Order Differential Feedback Controller, HODFC),该方案应用设计的高阶微分器(High Order Differentiator, HOD)估计参考输入和输出的微分以及高阶微分信息,提出了应用控制滤波器间接补偿系统未知模型的方法,并通过微分反馈控制和控制滤波补偿使闭环系统渐近稳定。HODFC是一种新型的不依赖模型控制策略。近年来已经成功应用于机械臂,斯图尔特(Stewart)平台,自动电压调节器等系统的控制[27-29]。文献[30]基于半自主自驾仪应用高阶微分反馈控制器实现了飞行器的位置跟踪控制及编队飞行,且控制性能优于传统的PID控制。迄今为止,采用ESO估计系统总扰动精度有限,HOD仅用于信号的高阶微分估计,尚没有研究将其用于估计系统的总扰动或未知模型函数。为了方便,我们统称系统模型中所有未知不确定性和未知扰动为系统的未知模型函数。本文的创新和贡献在于:
1) 研究发现,HOD可以用于估计未知模型函数,在HOD基础上,引入控制输入信息,设计了改进的高阶微分器(Improved High Order Differentiator, IHOD)。分析了IHOD对未知模型函数估计的收敛性,证明IHOD较ESO高1个类型,仿真验证了该结果。另外,对具有高阶无穷小量一般未知正弦函数进行了测试,表明IHOD估计精度比ESO提高14倍。
2) 针对具有未知扰动和不确定性的四旋翼飞行器姿态系统设计了双闭环不依赖模型控制策略。内环应用IHOD估计未知模型和输出微分,设计了带有模型和扰动补偿姿态角速度的跟踪控制器。外环直接通过比例控制实现姿态角的跟踪控制。应用Lyapunov稳定性理论,证明了所设计的基于IHOD的双闭环不依赖模型控制器的闭环系统稳定性。
3) 通过基于Pixhawk的四旋翼飞行器姿态系统控制测试平台,实验验证了所设计的基于IHOD的双闭环不依赖模型控制策略对不同参考姿态角的跟踪性能及抗扰性能。同时分别设计了PID,ADRC和传统HODFC的双闭环不依赖模型控制器,并与所提出的基于IHOD的双闭环控制策略进行了性能对比分析,进一步验证了所提出的改进的高阶微分器在控制性能上更具优势。
1 四旋翼飞行器姿态系统模型
对“×”型结构四旋翼飞行器进行研究,如图1所示,其中,E={x,y,z}表示惯性坐标系,B={xb,yb,zb}表示机体坐标系,xb指向机头方向,zb垂直机体平面指向地面,yb与xb、zb满足右手定则,Fi(i=1,2,3,4)表示电机旋转产生的升力。
考虑系统的不确定性,四旋翼飞行器的姿态动力学模型描述为
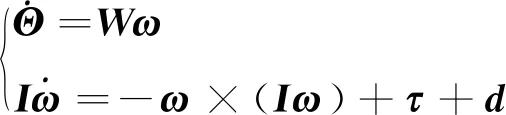
(1)
式中:Θ=[φθψ]T为四旋翼飞行器在惯性坐标系中的欧拉角;ω=[pqr]T为机体角速度;τ=[τxτyτz]T为螺旋桨产生的控制输入力矩;d=[dxdydz]T为系统的不确定性,它包括两部分,一部分是未建模动态,如陀螺力矩、机体部分坏损、负载和气动阻力等,另一部分是可能存在的内部或外部未知时变扰动。矩阵W表示为
(2)
四旋翼飞行器的转动惯量矩阵为
(3)
实际中,不能保证四旋翼飞行器结构完全对称,其质心与机体几何中心可能不完全重合。因此,考虑惯量积不为零,系统式(1)中第2个式子描述的每一个子系统都可以统一表示为如下一阶形式:
(4)

(5)
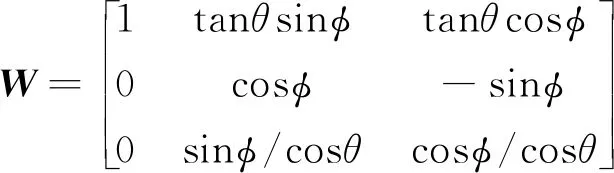
为了方便控制器的设计,省略式(5)中的下标i和j,有:
(6)
式中:f为未知函数,包括系统结构和参数不确定性,已知和未知扰动,未知控制输入部分等;b是与系统结构参数相关的可调参数。一阶系统式(6)所表达的无人机姿态系统具有一定的普遍性。尽管很多系统用二阶微分方程表示,但是如果采用双闭环方案,内环仍然是一个一阶系统。关于未知函数f的估计将在第2节给出。
给定参考姿态角Θr=[φreθreψre]T,定义eΘ=Θr-Θ为姿态角跟踪误差,控制目标是设计控制输入τ,使得系统姿态角渐近跟踪参考值,即
(7)
2 改进的高阶微分器设计及收敛性分析
针对式(6)描述的一阶系统,设计IHOD在线实时估计未知函数f,分析和比较设计的IHOD与ESO的收敛性。

将一阶系统式(6)中的未知函数f扩张为1个新的状态,则系统式(6)扩张为1个新的二阶系统,即
(8)
式中:[x1x2]T=[yf]T为系统的状态。
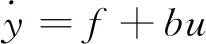
HOD[21]能够估计参考输入和输出的微分以及高阶微分,但是不能估计系统未知模型。研究发现,如果引入系统的输入量,可以作为未知模型的观测器。系统输出y可测,因此使用测量得到的y,针对一阶系统式(6),设计的IHOD为
(9)

图2 二阶IHOD与ESO原理对比图

(10)


定理1对于系统式(6),当未知函数f是二阶无穷小函数时,所提出的IHOD对f的估计无差收敛,即

(11)
IHOD对f的估计是二型系统,当未知函数f的二阶导有界时,所提出的IHOD对f的估计误差有界。
证明定义未知函数f在t和t*=t-Δt时刻分别为f(t)和f(t*),其中Δt为采样长度。假设f(t)是二阶无穷小,即f(t)的一阶导有界,则f(t)在t*时刻的泰勒展开式为
(12)

(13)
其中:A是Hurwitz矩阵,有
(14)
即
(15)
(16)
其等效的单位负反馈系统的开环传递函数为
(17)
即式(9)设计的IHOD对未知函数f的估计是二型系统。证毕。■

注2针对系统式(6),现有最为常用的二阶ESO可以表示为
(18)

(19)
(20)
其等效的单位负反馈系统的开环传递函数为
(21)
由式(21)可知,ESO对未知函数f的估计是一型系统,只有当f是常值时,ESO的估计才能实现无差收敛;当f是斜坡函数时,ESO的估计误差有界,虽然该界值随观测器带宽的增大而减小,但带宽增大会带来量测噪声的放大,因此采用增大带宽方法不可取;当f是二阶及以上函数时,ESO的估计误差发散。
注3系统式(9)设计的IHOD对未知函数的估计比ESO高1个类型,主要原因是2个观测器的输出方程不同。
3 四旋翼飞行器姿态系统控制器设计
针对四旋翼飞行器的姿态系统,本节设计了基于不依赖模型控制策略的双闭环控制器。图3为四旋翼飞行器姿态系统的控制结构框图,其中P表示比例控制器,MFC表示不依赖模型控制器(Model-free controller, MFC)。外环设计参考角速度指令,使四旋翼飞行器的姿态角渐近跟踪参考的姿态角;外环控制器发出的角速度指令将作为内环控制器的参考值,通过内环设计高阶微分反馈控制器得到控制力矩,使飞行器的姿态角速度渐近跟踪该参考角速度。

图3 QUAV姿态系统控制结构图
3.1 双闭环不依赖模型控制器设计
为方便控制器设计和闭环系统稳定性分析,假设姿态系统的运动学方程满足
(22)
即欧拉角变化率等于机体角速度。
实际姿态实验中遥控器的4个通道指令分别转化为滚转角、俯仰角的参考指令,偏航角速度参考指令和能使飞行器悬停的升力,因此外环只需考虑滚转角和俯仰角的跟踪控制。设计的滚转角和俯仰角的角速度指令为
(23)
式中:kφ、kθ为外环比例控制器的增益,这2个角速度控制输出量与遥控器发出的偏航角速度指令一起作为内环控制的参考角速度pr、qr、rr。针对式(6)描述的姿态系统动力学方程,本文设计基于IHOD的不依赖模型高阶微分控制,即IHODFC,其控制力矩τ=[τxτyτz]T为
(24)
综上,所设计的双闭环控制策略仅依赖系统的参考信号和可测输出,系统中的未知模型函数和微分信息通过改进的高阶微分器估计得到,不需要已知系统精确的数学模型。下面将分析基于该控制策略的闭环系统稳定性和收敛性。
3.2 闭环系统稳定性和收敛性分析
四旋翼飞行器姿态系统中每个子系统的模型都可以用如下二阶系统描述(以俯仰角为例):

(25)
定义姿态角跟踪误差eθ=θr-θ,角速度跟踪误差eq=qre-q,针对该二阶系统,设计的基于IHOD的IHODFC双闭环控制策略为
(26)
定理2当四旋翼飞行器姿态子系统式(25)中未知函数f的一阶导有界时,基于IHOD估计的未知模型函数,应用所设计IHODFC(式(26))控制四旋翼飞行器跟踪参考姿态角,能实现闭环系统渐近稳定,姿态跟踪误差渐近收敛,即
(27)


(28)

(29)
设计Lyapunov函数为
(30)
式中:P是对称正定矩阵且满足如下Lyapunov方程
ΛTP+PΛ=-Q
(31)
其中:Q>0。

(32)
从而
(33)
4 数值仿真
4.1 IHOD和ESO估计未知函数的对比
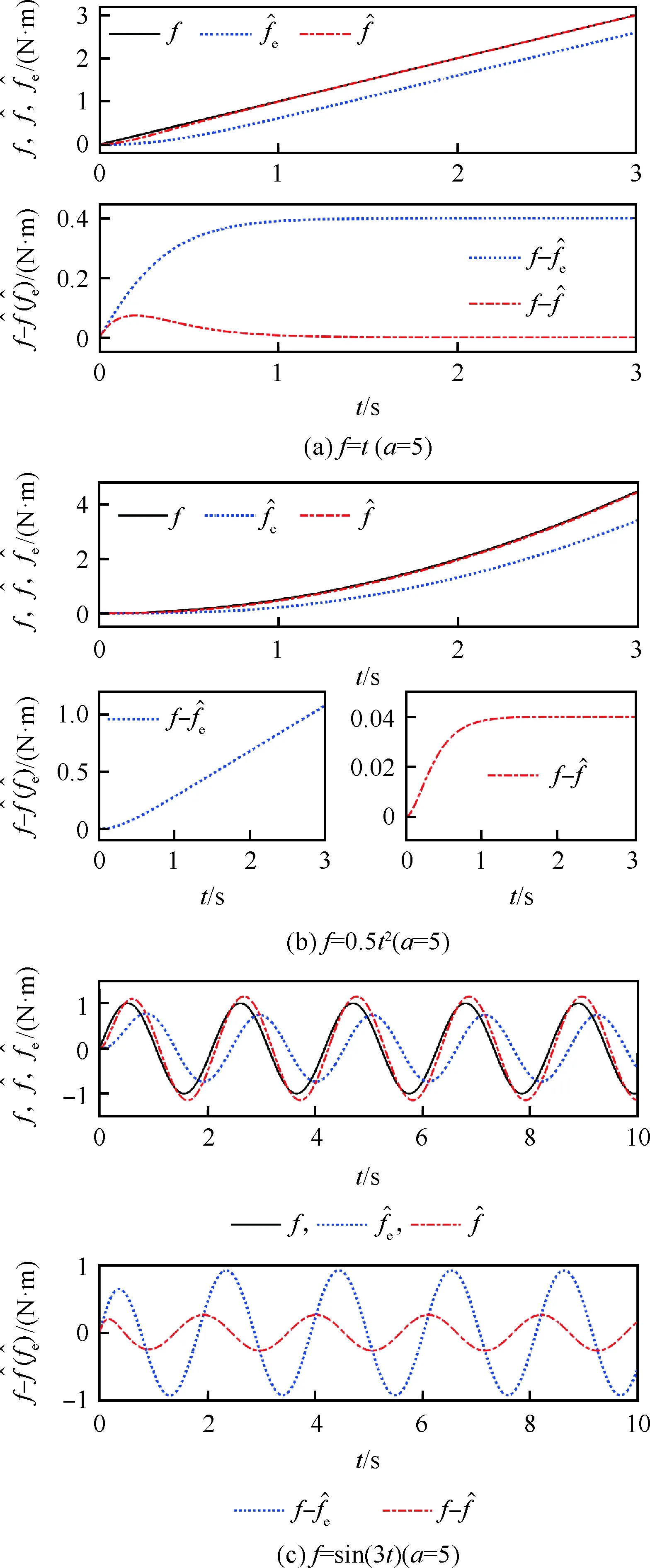
图4 IHOD和ESO分别估计3个类型未知函数的效果
由图4可知,当未知函数f=t(一阶导有界)时,IHOD估计f实现无差收敛,ESO估计f的误差是非零有界的;当未知函数f=0.5t2(二阶导有界)时,IHOD估计f的误差有界,而ESO估计f的误差发散;对于一般的未知函数f=sin(3t),IHOD估计f的平均绝对误差为0.034 7,ESO的平均绝对误差为0.4907,在相同参数条件下IHOD的估计精度比ESO提高了约14倍,这个估计精度的提高是非常可观的,在控制中,如果未知函数估计精度低会影响控制暂态性能,甚至稳态误差。
4.2 四旋翼飞行器姿态角跟踪仿真测试
将3.1节设计的基于IHODFC的双闭环控制策略应用于四旋翼飞行器的姿态控制,并与传统的PID,ADRC和HODFC方法比较,测试了本文所提方法的可行性和优越性。仿真中将系统式(1)作为四旋翼飞行器姿态模型,其中惯量积取主惯量的10%,即
Ixy=Ixz=0.1Ixx=0.002 11(kg·m/s2)
Iyx=Iyz=0.1Iyy=0.002 19(kg·m/s2)
Izx=Izy=0.1Izz=0.003 66(kg·m/s2)
d=-0.03ω+d0,其中d0为外部扰动。系统的初始状态取Θ0=ω0=0。仿真中4种控制算法外环采用的比例控制参数均为6.5,内环选取的控制器参数如表1所示。由于参数b与系统结构有关,准确来说与主惯量有关,所以首先确定b的取值;观测器ESO,HOD和IHOD的参数越大,估计精度越高。为公平起见,在参数一致的条件下,比较了4种控制算法的跟踪性能和抗扰性能。以滚转通道为例,设置期望滚转角度为φre=0.15 rad≈8.60°,6~10 s之间的外部扰动为dφ0=0.01sin(5t),滚转通道的跟踪及抗扰效果如图5所示。
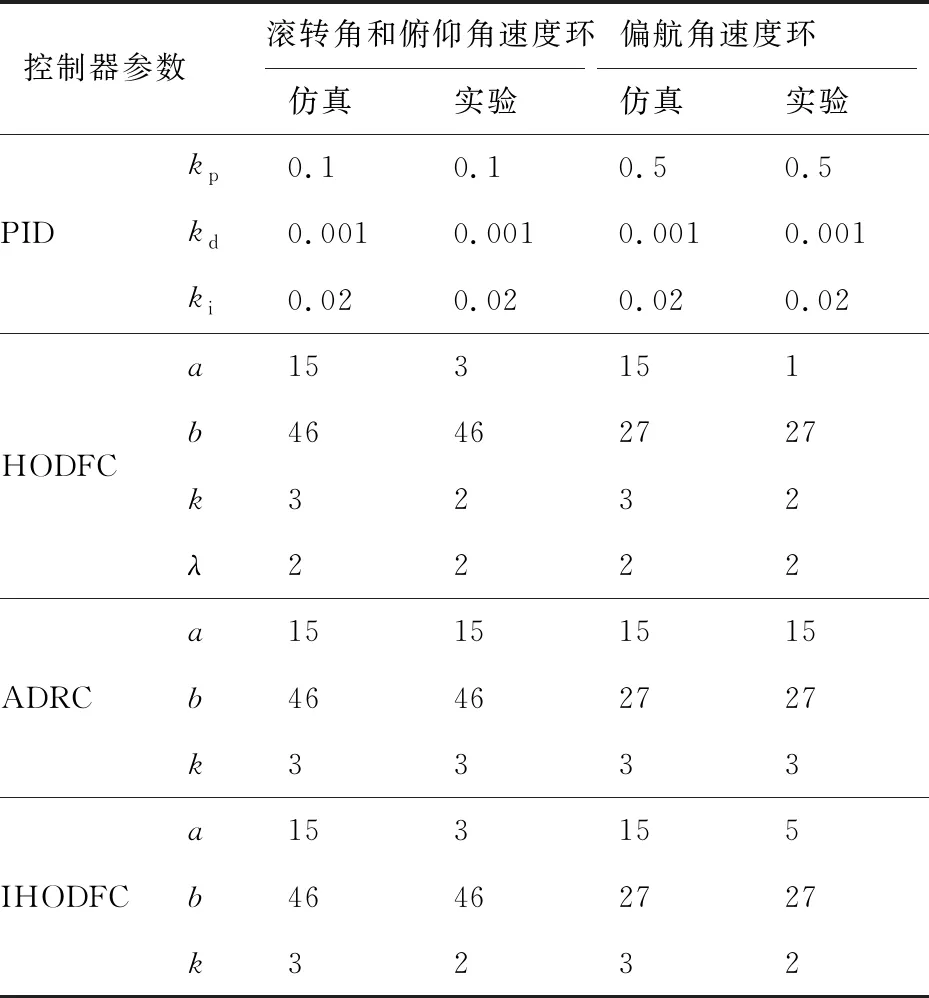
表1 姿态角速度环4种控制算法的参数
图5(a)结果表明,具有未知函数补偿能力的HODFC、ADRC和IHODFC控制效果优于PID。在相同参数条件下,所提出的IHODFC在暂态响应和抗扰能力方面比HODFC和ADRC都好;且仿真发现,增大观测器参数和控制增益参数,这3种方法控制性能都有所提高,因此本文所提出的IHODFC能实现其他控制器需在“大带宽,大增益”条件下的控制性能。对比图5(b)和图5(c),进一步说明IHOD对实际系统中外部扰动和耦合项等未知模型函数的估计精度要比相同参数条件下的ESO精度高,从而表明IHODFC在暂态性能和抗扰能力方面的优势。

图5 滚转角跟踪及未知模型函数估计对比
5 实验验证
实验验证闭环控制系统。实验采用基于Pixhawk的四旋翼飞行器控制算法开发平台,被控对象为大疆F450机架四旋翼飞行器,实验室搭建了四旋翼飞行器姿态系统控制的测试架,如图6所示。进行3组实验,分别是滚转角跟踪阶跃参考、俯仰角跟踪柔化的阶跃参考、以及滚转角的抗扰测试。控制策略是双闭环控制,外环控制方案相同,即比例控制,内环分别采用4种控制方案,即PID、ADRC、HODFC和所提出的IHODFC(式(26)),并进行对比分析,实验验证了所提控制算法在控制性能上优于其他控制策略。

图6 基于Pixhawk的QUAV姿态系统控制测试平台
四旋翼飞行器在万向节底座上的初始状态约为[φ0θ0ψ0]T=[0° -35° 0°]T,参考的初始状态为[φre0θre0ψre0]T=[0° 0° 0°]T,四旋翼飞行器在万向节底座上的滚转角和俯仰角最大值为φmax=θmax=±35°。
实验中的控制器参数参考仿真参数,再根据飞行器实际飞行效果进行了调整,最终采用的参数如表1所示。
5.1 滚转角跟踪阶跃参考
本组实验测试4种控制算法跟踪阶跃参考的性能,滚转角的参考值φre通过遥控器实时设置
(34)
式中:ch1代表遥控器的滚转通道摇杆,对应的PWM值范围是1 100~1 900 μs。首先通过遥控器的油门通道(ch4)使机体到达参考的初始姿态[φre0θre0ψre0]T=[0° 0° 0°]T,并保持悬停一段时间,当ch1值大于1 700 s时,滚转角的参考值变为8.6°。基于4种控制算法跟踪参考滚转角的结果如图7所示。
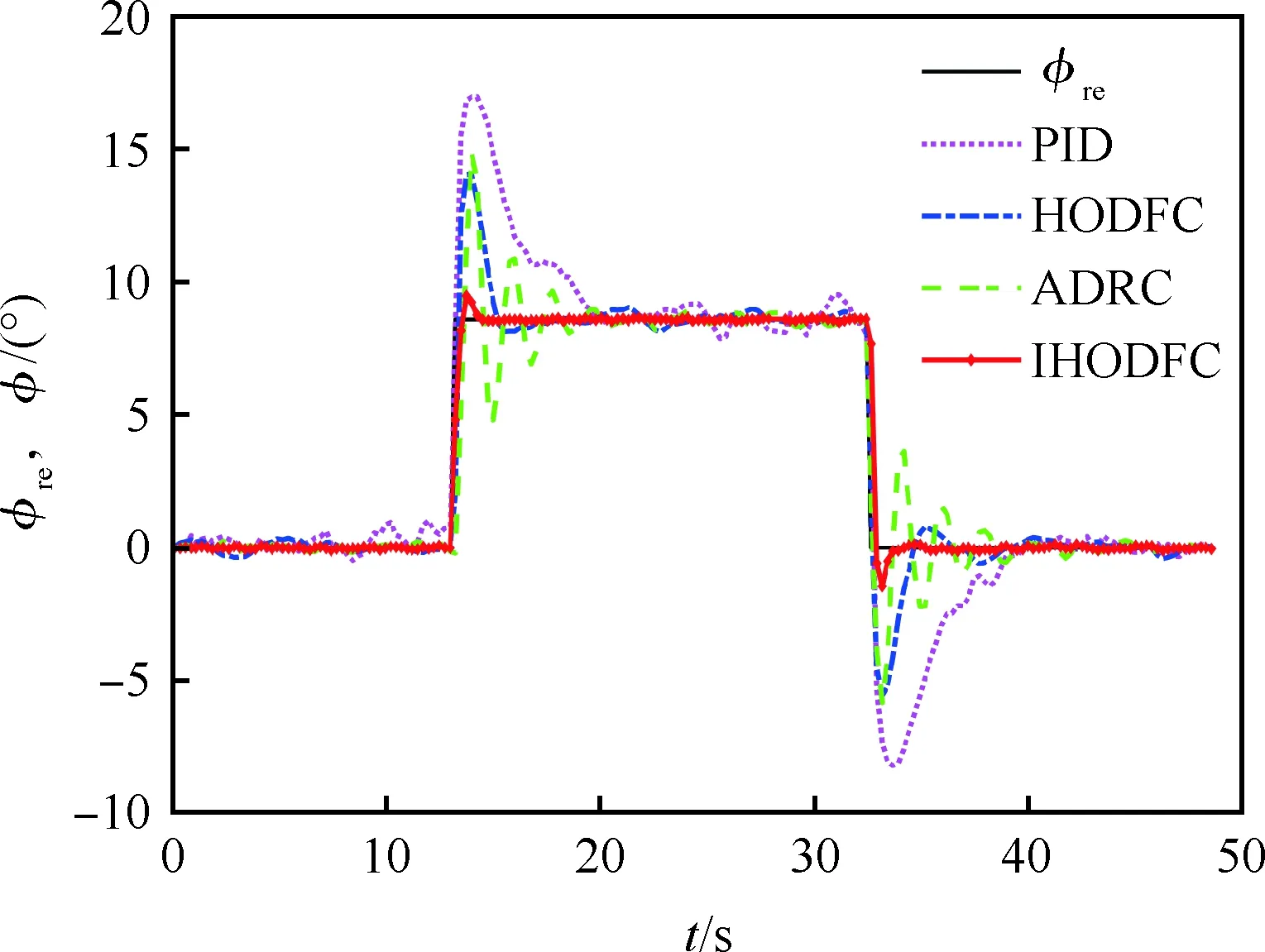
图7 滚转角基于4种控制算法跟踪阶跃参考
该组实验与图5所示的仿真结果相比,在控制器参数完全相同或类似的情况下,实际系统跟踪参考姿态角的超调更大,响应速度更慢。其中ADRC的暂态表现出明显振荡,主要是由于ESO的观测器参数较小,面对实际系统中更大的不确定性还需要继续增大参数来提高估计精度,但观测器参数越大容易引入高频噪声。相比之下,HODFC和IHODFC在选择比仿真时更小的观测器参数条件下,响应速度也要比前两者快,且IHODFC的超调更小。
5.2 俯仰角跟踪柔化的阶跃参考
本组实验测试俯仰角跟踪柔化的阶跃参考的控制性能,俯仰角的参考值通过实时改变遥控器的舵量给出,以模拟实际中给定的缓慢变化的参考信号。4种控制算法下飞行器跟踪参考俯仰角的结果如图8所示。

图8 俯仰角基于4种控制算法跟踪柔化的阶跃参考
与图7相比,参考信号变化较小,在跟踪缓慢变化的参考信号时,四种控制方法的超调均有所减小。IHODFC的控制效果仍然是最佳的,几乎没有超调,且响应更快,跟踪精度更高。
5.3 滚转角抗扰测试
本组实验测试控制算法对扰动的抑制能力。实验前在飞行器机体左侧悬挂同一重物,并且先将其托起,使它不影响飞行器的正常飞行。在飞行器保持悬停一段时间后,瞬间释放机体左侧悬挂的重物,且该重物不移除,模拟机体可能受到的外部扰动。4种控制算法的抗扰测试结果如图9所示。
可以看出,在PID控制下,滚转角受到扰动之后,有很大的超调,且无法克服扰动影响重新回到原来的平衡位置,即有稳态误差;HODFC和ADRC较PID的超调小,但ADRC有长时间的振荡,二者都能克服扰动影响重新回到平衡位置;IHODFC能快速抑制扰动,以更高精度重新保持平衡状态,抗扰能力有很大提升。

图9 基于4种控制算法的抗扰测试
因此,通过测试四旋翼飞行器的姿态角跟踪阶跃参考和柔化的阶跃参考控制,与其他3种不依赖模型控制方案对比,提出的IHODFC控制策略大幅减小了超调,提高了飞行器的跟踪速度和稳态精度,且具有更强的抗干扰能力。
6 结 论
1) 估计误差收敛性分析表明,改进的高阶微分器(IHOD)对于未知函数的估计比扩张状态观测器(ESO)高1个类型。对于二阶无穷小函数,IHOD的估计误差能收敛至零,而ESO的估计误差有界;当未知函数二阶导有界时,IHOD的估计误差有界,而ESO发散。仿真验证了IHOD的收敛性和较高的估计精度。
2) 利用Lyapunov函数证明了基于改进的高阶微分反馈控制策略的闭环系统的稳定性和收敛性。
3) 在基于Pixhawk的四旋翼飞行器控制测试平台上,验证了所提出的改进的高阶微分反馈控制策略的有效性,并与经典的PID控制,自抗扰控制,传统的高阶微分反馈控制做了对比。实验结果表明所提方法使四旋翼飞行器跟踪参考姿态的超调大幅减小,响应时间大幅缩短,跟踪参考姿态的精度比PID、ADRC和HODFC都有所提高;且抗扰能力较PID、ADRC和HODFC更强。
