柔性压阻式压力传感器应用与展望
2023-01-09汪康,喻研
汪 康,喻 研
(华中科技大学 光学与电子信息学院,武汉 430000)
0 引言
相比于硅基传感器而言,柔性传感器由于机械灵活性、质量轻和可穿戴的优点而受到人们的青睐,除了能够检测常见的物理信号:声学信号[1]、光学信号[2]、热学信号[3]、力学信号[4],还能够对化学信号进行检测,如葡萄糖[5]、pH[6]、汗液[7]、气体[8]等。自然界中的任何动作都伴随着力的作用,因此柔性传感器对压力的检测最为广泛。许多原理已经被用来解释柔性传感器对压力的检测,包括压阻式[9-10]、电容式[11-12]、压电式[13-14]、摩擦电式[15-16]、晶体管[17-18]、光纤[19-20]。其中柔性压阻式压力传感器只需要考虑衬底材料与导电材料间的相互融合,同时可以通过设计各种微结构提升传感器的灵敏度,并且其结构简单、易于制备、成本低,在生活、工业、医疗等方面被广泛使用。易弯曲是柔性压阻式压力传感器的典型特征,它可以在弯曲或拉伸状态下保持传感器优异的性能,这决定了它在可穿戴设备中的应用潜能,贴在人的身体表面通过电学信号传递身体内部信号用以健康监测[21-24]。除了与人体相兼容获取健康状态信息,柔性压阻式压力传感器还可以作用在机器人表面模仿真实皮肤赋予机器人触觉感知能力[25-27]。同时物联网技术与人工智能的飞速发展加大了柔性压阻式压力传感器在工业领域的需求,使其通过力学信号感知-电学信号处理-力学信号反馈实现对设备的监测和精准控制[28]。
灵敏度是衡量传感器性能的一个重要参数,科研人员致力于通过结构设计不断提升柔性压阻式压力传感器灵敏度实现小压力检测[29-31]。尽管相关研究工作已经取得较大进展,然而传感器在实际应用时仍面临着许多挑战,例如小型化、抗干扰能力、耐久性、生物兼容性、透气性、信号的传输与处理和低成本大规模制备等。本文首先在第一节中,对柔性压阻式压力传感器的常见应用进行归纳;在第二节中对柔性压阻式压力传感器的未来发展方向进行展望,在提升传感器性能的同时需要考虑到实际应用;最后对本文工作进行总结,表明柔性压阻式压力传感器从制备到应用是多学科交叉的结果。
1 应用
柔性压力传感器的应用包括健康监测、植入式医疗、触觉感知和形状识别,但考虑到传感器植入到人体内部时电源供给困难,植入式医疗传感器理想情况下是从周围环境中获取能量,大多都是基于压电材料和摩擦电材料实现压力感知[32-35],因此本节主要介绍柔性压阻式压力传感器在健康监测、触觉感知以及形状识别上的应用场景。
1.1 健康监测
人的皮肤是柔软有弹性的,柔性传感器由于其柔韧性和可拉伸性能够与人体皮肤相兼容,一个典型应用就是作为可穿戴器件贴在皮肤表面用以健康监测,如呼吸、脉搏、血压、发音以及肢体运动等。
对压力的检测中,表皮的振动信号是极其微弱的,需要传感器具备高的灵敏度。为了实现对微弱信号的检测,Wu等[36]通过激光刻划石墨烯在Eco-flex衬底上制备了高灵敏度宽检测范围的压力传感器并展示其对生理信号的检测:在70 kPa-1范围内灵敏度高达67.43 kPa-1,检测范围达到200 kPa。该传感器有类似三极管信号放大的功能,如图1(a)所示,将压力传感器贴在手腕处,通过外力调控能够将脉冲信号放大,图1(b)展示了外力调整下输出的脉冲波形,对应的单周期波形如图1(c)所示,可以看见传感器能够区分“S”、“P”、“T”和“D”特征峰。由于传感器的高灵敏度,使其同时能够对颈动脉(CA)、肱动脉(BA)、桡动脉(RA)和足背动脉(DPA)的血压波形进行采集。

图1 高灵敏度压力传感器检测生理信号:(a) 通过外界压力调节传感器灵敏度;(b) 不同压力下的脉冲波;(c) 单周期脉冲波;(d) 颈动脉、肱动脉、桡动脉、背动脉血压采集[36]Fig. 1 High sensitivity pressure sensor detects physiological signal: (a) Schematic diagram of sensitivity adjustable by external pressure; (b) Pulse waves at different pressure; (c) The single period pulse wave; (d) Blood pressure waveforms and values collected at the carotid artery (CA), brachial artery (BA), radial artery (RA), and dorsalis pedis artery (DPA)[36]
Tang等[37]将可控石墨烯纳米片与褶皱聚二甲基硅氧烷(Polydimethylsiloxane, PDMS)弹性体相结合开发出一种高灵敏度低成本的柔性压阻式压力传感器,将传感器贴在手腕处能够检测到腕部脉冲信号。同时将传感器贴在喉咙处测试声带振动,能够对 “Hello”和“Senor”发音有不同的电流输出,这是发音使传感器发生形变引起电阻变化的结果,然而该器件不能判断出具体发音。为了帮助发音困难的患者开口“讲话”,Wei等[38]研发出一种可穿戴超高灵敏度石墨烯人工喉,如图2所示,通过构建双模系统能够对喉咙轻微运动和真正发音进行区分,不同的发音产生不同的电阻变化,电阻变化经过信号放大转化为电压变化驱动声音发射器发出声音。
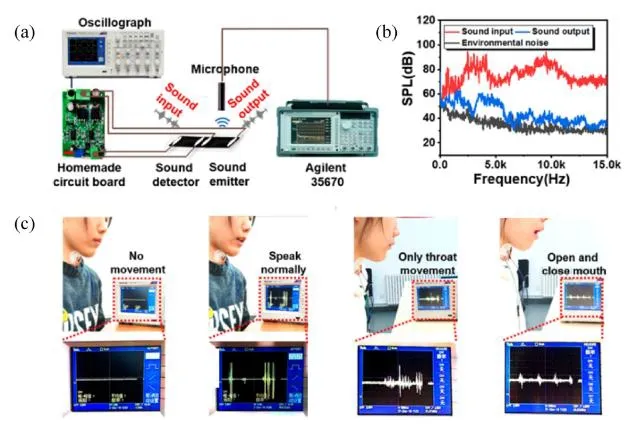
图2 石墨烯人工喉咙:(a) 声音检测和发射装置;(b) 石墨烯声探测系统的声响应;(c) 不说话、正常话、仅喉部运动和张闭嘴时不同的输出波形[38]Fig. 2 Graphene artificial throat: (a) Device for sound detection and transmission; (b) Acoustic response of graphene sound detection system; (c) Device for sound detection and transmission; (d) Different output waveforms when no speaking, normal speaking, laryngeal movement and opening or closing mouth[38]
压力传感器也经常用来检测肢体运动,Yu[29]等通过在三维网状热塑性弹性衬底(TPE)嵌入碳纳米管(CNTs)制备压力传感器,传感器在拉伸和压缩下具有优异的综合性能。如图3所示,当面部作出不同的表情如微笑和大笑时传感器能够产生不同的输出信号,将传感器安装在肘部时,传感器电阻随着肘部运动幅度的增加而显著增加,表明传感器在肢体运动检测上具有潜在应用。然而肢体运动往往伴随着大幅度的应变,运动恢复后传感器能否回到初始状态以及重复性运动后对传感器稳定性的检测也是有必要的。
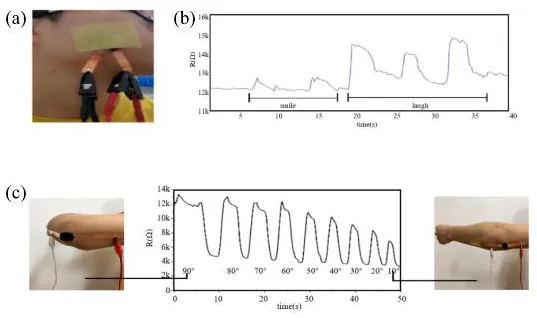
图3 压力传感器检测肢体运动:(a) 将传感器贴在面部检测面部表情;(b) 不同面部表情时传感器的输出; (c) 不同肢体动作时传感器的输出[29]Fig. 3 Pressure sensor detect body movements: (a) Photograph of the sensor attached to a face; (b) Output of the sensor for different facial expressions; (c) Output of the sensor for different body movements[29]
1.2 触觉感知
假肢虽然给予患者一定的行动能力,但缺乏皮肤的真实感,最典型的就是无法接受外界的触觉信号。触觉的缺失使患者无法对危险信号做出判别,同时会对心灵造成创伤,柔性压力传感器有望让假肢患者恢复触觉。如图4(a)所示,Chen等[39]将压力传感器贴在机械手上,机械手与电机连接,在机械手前方悬挂一个乒乓球,机械手往前移动碰到乒乓球后接收到触觉信号,电流迅速增加,超过电机阈值电流则机械手停止前进并后退,此时乒乓球并未发生移动,表明机械手能够对微小力进行响应。传感器对应输出如图4(b)所示,可以看见传感器具有良好的响应时间与可重复性。这虽然赋予了机械手对触觉信号的感知能力,然而如何将触觉信号通过传输、处理传递到大脑仍面临着挑战。
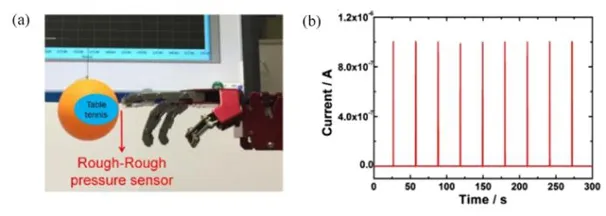
图4 压力刺激调整机械手运动:(a) 悬挂乒乓球与带有压力传感器的机械手图片; (b) 机械手碰到乒乓球电流响应[39]Fig. 4 Pressure stimulation adjusts manipulator motion: (a) Photograph of hanging table tennis with and manipulator with pressure sensor; (b) Current response of the sensor when manipulator encounters the table tennis[39]
在工业机器人领域,机械手抓取物体时需要调节抓取力的大小做到精准抓取。如图5(a)所示,Sun等[28]在机械手上安装两个压力传感器,分别展示了抓取5 g和50 g不同质量物体时的应用场景。输出结果对应图5(b)和5(c),可以看出抓取50 g物体时所需要的抓取力明显大于5 g,传感器在抓取和释放过程中很快得到力的反馈,并且释放后能够回到初始状态,机械手可以借助传感器调整抓取力的大小抓取不同质量的物体。
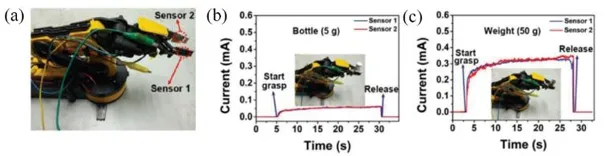
图5 压力刺激调整机械手抓取力大小: (a) 安装两个压力传感器的机械手; (b-c) 抓取再释放5 g和50 g物体时传感器的输出[28]Fig. 5 Pressure stimulation adjusts the grasping force of the manipulator: (a) Photograph of the manipulator with two pressure sensors; (b-c) Output of the sensor when grabbing and releasing 5 g and 50 g objects[28]
柔性压力传感器在生活娱乐中也能发挥作用。Kim等[22]将13个压力传感器嵌入键盘模仿柔性钢琴垫,如图6(a)所示,钢琴垫具有良好的柔韧性并且对弯曲不敏感。通过手指按压钢琴垫改变负载电阻的大小调节电压,当电压超过阈值电压时钢琴垫将曲线斜率转化为音量输出(图6(b))。图6(c)展示了音量与压速的关系,音量随着压速的增加而增加,并且可以同时按压不同键实现不同音符的播放。
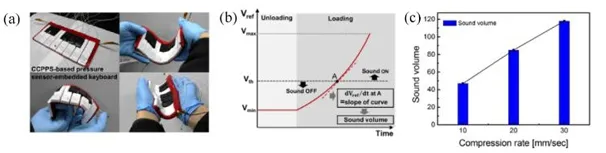
图6 压力传感器在柔性钢琴垫中的应用:(a) 柔性钢琴垫实物图; (b) 将传感器信号转为音量的方法; (c) 输出音量随着压速的增加而增加[22]Fig. 6 Flexible piano pad based on flexible pressure sensors:(a) Photograph of the flexible piano pad with good flexibility; (b) The method of converting sensor signal to volume; (c) The output volume increases as the pressure rate increases[22]
1.3 形状识别
人的皮肤除了能够感受触觉信号外,还能判断受力区域以及识别施力物体形状,这是因为皮肤内存在丰富的敏感神经细胞。为了模仿真实皮肤,科研人员通常将压力传感器集成阵列的形式协同工作来识别物体形状。
Chen等[40]通过丝网印刷在印刷纸上集成4×4导电银浆电极矩阵,接着将碳化绉纸作为压力传感器敏感层与导电银浆结合并用聚酰亚胺(PI)胶带封装。如图7所示,在传感器阵列上放置钥匙一样不规则物体,通过对应位置颜色变化模仿钥匙物体形状。同时传感器还能对受力位置进行区分,将两个不同质量的砝码放置在传感器阵列上,可以看见传感器在受力区域有明显的电阻变化。然而该4×4传感器阵列具有较大尺寸,每个敏感单元宽度为10 mm,一共有17个输出端口。

图7 传感器阵列对施力物体形状识别以及受力区域区分:(a) 一个钥匙放置在传感器阵列上;(b) 通过颜色识别钥匙的形状;(c) 两个不同质量的砝码放置在传感器阵列上;(d) 放置砝码时传感器电流变化三维柱状图[40]Fig. 7 Sensor array recognize the shape of the applied object and distinguish the force area: (a) A key is placed on the sensor array; (b) Recognize the key shapes by color; (c) Two weights of different masses are placed on the sensor array; (d) Three-dimensional bar diagram of sensor current change with weight placement[40]
小型化是传感器阵列的一个发展趋势,人类身体触觉传感密度一般每平方厘米有30~40个敏感元素[41],当敏感元素间的距离变小时,电极制备会变得困难。为了解决这一问题,科研人员通常采用上下电极、中间敏感层的三明治结构,同时这种结构还可以减少输出端口的数目。He等[42]研发了一种8×8传感器阵列,如图8(a)所示,传感器阵列边长小于14.52 mm,封装边长小于20.54 mm。将传感器放在纯的光滑凝胶以及中间有异物的凝胶上并施加相同的压力,输出结果如图8(b)和8(c)所示,传感器放在表面有异物的凝胶上时,中心受到压力大于边缘压力,如同皮肤触摸到异物,这对肿瘤的检测有重大意义。
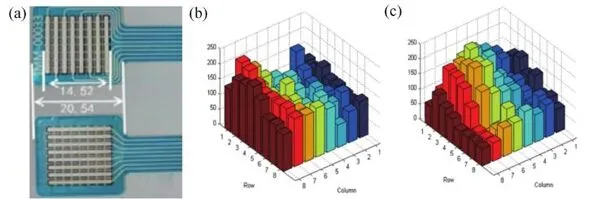
图8 传感器阵列小型化:(a) 8×8传感器阵列; (b-c) 将传感器放在光滑凝胶和中间有异物凝胶上的输出[42]Fig. 8 Seneor array miniaturization: (a) Photograph of 8×8 sensor array; (b-c) Sensor outputs when placed on smooth gel and gel with foreign bodies in the middle[42]
传感器阵列元素小型化有助于形状识别精度,然而对于生活中抓取形状较大的物体如苹果、水杯则需要大规模集成传感器阵列。如图9所示,Sundaram等[43]在针织手套上集成548个压阻式压力传感器阵列,结合卷积神经网络获取抓取时产生的大规模数据,传感器阵列能够同时与26个不同的物体交互,通过数据与物体关联可以识别单个物体,并估计他们的重量。
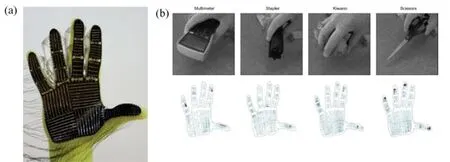
图9 针织手套上大规模集成传感器阵列:(a) 针织手套上集成548个传感器阵列; (b) 抓取万用表、订书机、火龙果和剪刀时的压力分布[43]Fig. 9 Large-scale integrated sensor array on knitted gloves:(a) A array of 548 sensors integrated on knitted glove; (b) Pressure distribution for grabbing multimeter, stapler, pitaya and scissor[43]
2 展望
上述通过提升传感器性能已经展示了诸多场景的应用,然而传感器在实际应用时面临着环境中的许多干扰,从实际应用角度出发,我们对未来传感器的发展方向做出几点展望,并围绕着这些方向介绍近几年工作进展。
2.1 多模态感知
人的皮肤除了可以感知压力信号,还可以感知剪切力、应变、温度、湿度和pH等其他信号。传感器的功能是实现信号的感知,为了使它更接近人体皮肤,多模态感知是一个重要的发展趋势。
Meng[44]等制备了一种石墨烯片/硅橡胶弹性体传感器,能够同时对压力、应变和温度敏感,当石墨烯片体积分数为3.75%时,传感器在0%~5%应变范围内应变系数达到100,在0~10 kPa压力范围内灵敏度为2.7×10-2kPa-1,在温度上升到75 ℃时电阻迅速增加,这对传感器的温度使用范围是可以接受的。然而应变和压力的检测都是通过电阻变化实现的,该传感器无法对应变和压力信号进行区分。
Zu[45]等将(3-氨基丙基)三乙基硅烷(APTES)修饰的还原氧化石墨烯(rGO)与聚乙烯基二甲氧基硅(PVMDMS)、乙烯甲基二甲氧基硅(VMDMS)共缩聚共价交联得到还原氧化石墨烯/聚有机硅氧烷气凝胶,其制备的传感器能够同时对应变(0.1%~80%)、压力(10 Pa~110 kPa)和温度(20~100 ℃)进行检测,1 000次压缩循环后对温度敏感特性不变。图10展示了该传感器的三种应用场景,研究者试图通过多个传感器配合工作消除温度对应变和压力的影响,然而应变和压力的影响是共同作用的。未来可以考虑通过小面积集成不同传感器阵列的形式,将多模态感知与单一模态感知相结合实现不同信号间的解耦。

图10 传感器阵列多模态感知:(a) 传感器附着在有热水的玻璃杯中电信号输出; (b) 手链放在弯曲传感器上电信号输出; (c) 昆虫在传感器上爬行时电信号的输出[45]Fig. 10 Sensor array multimodal sensing: (a) Electrical signals output when the sensor is attached to the surface of glass with hot water; (b) Electrical signals output when the bracelet is placed on the bending sensor; (c) The output of electrical signals as the insect crawls on the sensor[45]
2.2 抗干扰能力
多模态感知的传感器对于不同信号间的解耦是一大挑战,而单一模态感知的传感器则需要有良好的抗干扰能力。实验中传感器性能的测试都是在理想环境下进行的,然而传感器在实际应用时会受到一系列的干扰如振动、汗水和湿气等,如何避免外界的干扰需要被考虑在内。
Gao等[46]将丁腈橡胶(NR)、多壁碳纳米管(MWCNTs)和石墨粉(GPs)溶于甲苯磁力搅拌形成均匀溶液,在聚对苯二甲酸乙二醇酯(PET)上蒸发Au作为顶部电极和底部电极,将导电溶液旋涂在下极板上,PET衬底用乙烯-乙酸乙烯共聚物(EVA)密封。MWCNTs具有负温度系数,GPs具有正温度系数,通过材料补偿以及EVA密封达到消除温度和湿度的影响,制备的压力传感器在不同的温度和湿度环境下I-V特性可重复。
Wang等[47]以石墨烯纳米片(GNPs)/多壁碳纳米管(MWCNT)/聚乙烯氧化物(PEO)作为活性材料,设计双层PDMS岛状结构消除应变的影响,并在上面覆盖PI膜,PI膜的杨氏模量较高可以有效减少变形,通过设计四个形状相同的元件组成惠斯通电桥来抑制热干扰,覆盖层使传感器抵抗湿度的干扰。如图11所示,将传感器镶嵌在手套上抓取含有不同温度水的玻璃瓶时,输出电压基本一致,消除了温度对传感器的影响,分别用干燥和潮湿的手去抓取正常和拉伸状态的传感器,重复多次,输出电压几乎没有发生变化,可见应变和湿度对传感器捕捉压力信号没有影响。

图11 传感器抵抗温度、应变和湿度的干扰:(a) 抓取和释放装有不同温度水的玻璃瓶时传感器输出电压变化; (b) 用干燥和潮湿的手分别去抓取不同拉伸状态下传感器时输出电压变化[47]Fig. 11 Sensor resist to temperature, strain and humidity:(a) The sensor output voltage changes when grabbing and releasing glass bottles with different temperatures water; (b) The output voltage changes of the sensor under different tensile states were captured by dry and wet hands [47]
2.3 自愈功能
柔性传感器在使用过程中由于大幅度的变形和尖锐物体的划伤会不可避免的对导电网络产生破坏,理想中的传感器是能够像皮肤一样在一定范围内具有自愈能力,这会增加传感器的使用寿命。
水凝胶是典型的自愈材料,通过物理交联和化学交联的可逆动态连接从而具有自愈功能,目前报道的具有自愈功能的柔性压力传感器大多是基于导电水凝胶实现的[48-51]。Xia等[52]将壳聚糖(CS)和羧基功能化多壁碳纳米管(c-MWCNTs)与疏水缔合交联的聚丙烯酰胺(HPAAm)网络相互渗透形成杂化网络水凝胶,当水凝胶断口接触时,通过疏水缔合、静电相互作用和氢键的修复使其恢复力学和电学性能。然而基于水凝胶的柔性压力传感器由于水分的挥发容易造成传感器性能下降,并且水凝胶在潮湿环境中容易吸收水分,许多措施已经被用来增强水凝胶的保水性[53-54]。除了水凝胶外,聚合度高的弹性体也被用来制备自愈传感器,Tian[55]等将聚苯乙烯(PS)微球结构夹在两个激光诱导的石墨烯/聚氨酯(LIG/PU)薄膜之间,如图12所示,当传感器切割未完全分离后,PU链上暴露的氨基和羧基可以重新建立氢键,室温下30 min内传感器可修复形成稳定的导电网络,并且修复后的传感器可以承受100 g的重量。
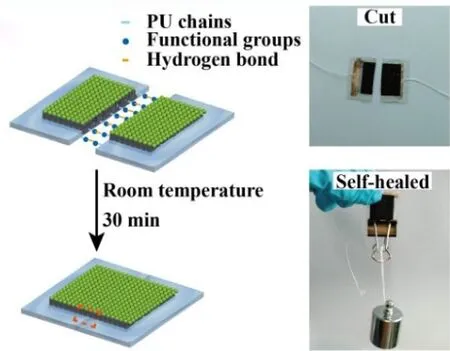
图12 传感器切割后室温下30 min可愈合,并能承受100 g的重量[55]Fig.12 The sensor heals up to 30 min after cutting at room temperature and can hold up to the weight of 100 g[55]
2.4 零待机功耗
柔性压力传感器即使在无外界压力时由于体电阻的存在也会使电路导通,造成不工作时能源的浪费。尽管可以通过控制功能层间的接触使传感器具有大的体电阻,然而柔性传感器一旦弯曲就会打破大电阻的局面。目前常用的方法是在功能层间添加间隔层使传感器在静态时绝缘,压力作用下导通从而实现零功耗待机[56-58]。
He等[59]自上而下设计出一种PDMS/ZnO/光刻胶垫片(PS)/Au/PI结构,如图13(a)所示,将有光刻胶垫片压力传感器接入电路中,可以通过施加压力控制灯泡的导通,传感器相当于开关的作用。图13(b)展示了基于人机交互时的应用场景,相同握手条件下,有光刻胶垫片的压力传感器输出电流小,具有低功耗的优点。然而目前传感器所能实现零待机功耗的极限在30°内,并且由于绝缘层的存在会阻止压力作用下导电层的接触,导致传感器灵敏度的降低。零待机功耗要求输出电流小,高灵敏度要求电阻变化大即大电流数输出,如何实现零待机功耗与高灵敏度兼容仍具有挑战。

图13 零待机功耗压力传感器应用:(a) 有无光刻胶垫片压力传感器在按压动作下灯泡亮度的变化; (b) 有光无光刻胶垫片在人机交互场景下的应用[59]Fig. 13 The application of zero standby power consumption pressure sensor: (a) Changes of bulb brightness under pressing action for sensors with photoresist gasket and without it; (b) Application of sensors with photoresist gasket and without it in human-computer interaction[59]
2.5 自供电
作为可穿戴器件时,为了给人体“减压”,柔性传感器会朝着小型化发展,附加电源会增加传感器的体积。压电式和摩擦电式传感器一个突出优势就是将机械能转换为电能用于传感器的自供电,然而只能用于动态力的检测。
人体与周围环境之间存在一定的温度差,通常情况下这种温度差是被浪费的,一个设想是利用热电材料从温度差中获得的能量为传感器供电[23,60]。Li等[23]将三维间隔织物(SF)浸泡在PEDOT:PSS溶液中取出烘干,银浆作为电极,铜丝将100个单元串联制备自供电柔性压力传感器,根据测量原理不同,可以独立读取温度和压力。如图14所示,将传感器阵列制备成可穿戴背心穿在假人身上,用手掌触摸肩部时可以分别显示出手掌的相对温度和压力分布。
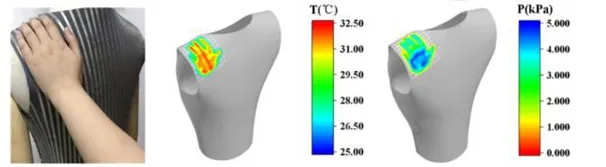
图14 手掌触摸传感器阵列时的温度和压力相对分布[23]Fig. 14 The relative distribution of temperature and pressure when the palm touches the sensor array[23]
除了能量转换外,能源存储器件也被用来为传感器供电[61-62]。Sun等[61]通过电化学反应使传感器在无电源的情况下既能检测静态力又能检测动态力。传感器结构如图15(a)所示,石墨/PDMS与电解质发生还原反应捕获电子,Al与电解质发生氧化反应失去电子,外界压力作用下负载电阻减小,电源依赖的是氧化还原反应在阳极和阴极上产生的电位差,因此可以实现对静态力的测量,输出结果如图15(b)所示。

图15 自供电压力传感器:(a) 自供电压力传感器结构示意图; (b) 压力传感器对静态力和动态力的测量[61]Fig. 15 Self-powered pressure sensor: (a) Schematic diagram of self-powered pressure sensor structure; (b) Measurement of static and dynamic force by pressure sensor[61]
除了以上内容,传感器在应用时,这些方向也是被考虑的:
(1) 为了增加柔性传感器的便携性,无线通信是传感器的一个重要方向,目前报道的无线压力传感器大多基于电容式,通过与外部天线的电感耦合组成LC谐振电路[63-65];
(2)传感器和处理模块的集成会增加系统的功耗,低功耗一直是研究人员关注的问题[66-67];
(3)传感器贴附在皮肤表面时,汗水的积累会滋生细菌,同时会损害传感器的性能,这要求传感器具有良好的透气性[68];
(4)传感器与人的皮肤应该有良好的接触匹配性,使用时不会产生异物感,并且长期使用不脱落[69-70];
(5)除了传感器与皮肤的匹配问题,功能材料与衬底材料由于模量失配在使用过程中可能发生脱落使传感器不能稳定工作,需要考虑增强功能材料与衬底材料间的界面粘附性[71-72];
(6)将传感器植入人体内部时,材料必须是无毒的、具有生物相容性,并且能够长时间稳定工作[35];
(7)对于柔性压力传感器一些应用场景如触摸屏、隐形软体机器人和智能皮肤,需要在保证传感器高透明度的同时兼顾优异的电学性能[73-74];
(8)此外,为了满足柔性传感器庞大的市场,需要探讨新工艺新材料实现柔性传感器低成本大规模制备。
3 结语
柔性压阻式压力传感器由于其良好的力学性能和电学性能在生活、工业、医疗等方面都有应用,随着物联网技术的发展以及人们对自身健康状态的日益关注,未来对传感器的需求是巨大的。目前科研人员对柔性压阻式压力传感器的研究已经开展了许多工作并展示了具体应用,然而这些应用仍处于实验阶段,如何将制备好的传感器应用到生活中并产业化是亟待解决的问题。传感器从设计、制备到应用涉及到材料、电子、能源、通信和计算机等多学科领域,一方面,未来柔性传感器的发展是多学科交叉共同努力的结果,另一方面,探索新材料、新结构、新原理和新工艺有望突破现有传感器性能的极限并实现低成本大规模制备。
