GAT高精陀螺仪在干扰环境下定向化学测量技术创新研究
2023-01-05蒙恬
蒙 恬
(西安铁路职业技术学院,陕西 西安 710026)
陀螺仪作为一种地下测量精度较高、依赖条件少的测量手段,在隧道、矿山、地铁、停车场等贯通测量中有着重要作用[1-2]。对陀螺仪定向测量数据的处理方法进行研究,可提升陀螺定向精度,同时也能够为陀螺仪的改进提供参考。目前,常用的为高精度磁悬浮陀螺,本文以GAT高精度磁悬浮陀螺全站仪为实验对象,提出一种基于定转子电流分布特征的数据处理方法,并对弱干扰和强干扰状态下的陀螺定向测量数据组进行处理与分析。
1 陀螺寻北定向原理与过程
1.1 陀螺寻北定向原理
悬挂带摆式陀螺,采用很长的一根悬挂带悬吊陀螺灵敏部,以子午线为中心轴进行摆动。在地球自转运动下,子午线方向也不断发生变化,引起陀螺摆动平衡位置的改变,摆式陀螺旋转轴持续跟踪子午线方向进行摆动的过程,就是其寻北过程。
传统的悬挂带陀螺仪在干扰环境下测量精度较差,且悬挂带容易断裂,造成悬挂带陀螺仪使用环境受限。如今常用的磁悬浮陀螺全站仪,是一种测量真北方位的精密定向仪器,采用磁悬浮支承技术,测量过程中陀螺灵敏部始终处于悬浮状态,环境适应性较好,测量精度得到显著提升。通过光电力矩反馈技术促进陀螺灵敏部的平衡,之后力矩器收集数据,计算陀螺敏感力矩大小,结合全站仪测量数据,达到寻北的目的[3-4]。
1.2 陀螺经纬仪定向过程
陀螺经纬仪定向过程主要分为5个环节:(1)在地面上测定仪器常数。陀螺仪轴的稳定位置,来源于其在摆动过程中的平均位置。通常,由于多种误差的存在,陀螺仪轴稳定位置和地理子午线的不在同一位置,2条线之间的夹角,就是陀螺经纬仪的仪器常数,用Δ表示[5]。地理子午线位于陀螺仪轴稳定位置西侧时,Δ大于0;否则Δ为负数。借助地面上已知方位角的一条边,在该点进行陀螺定向测量,可得到仪器常数;陀螺定向示意图如图1所示。
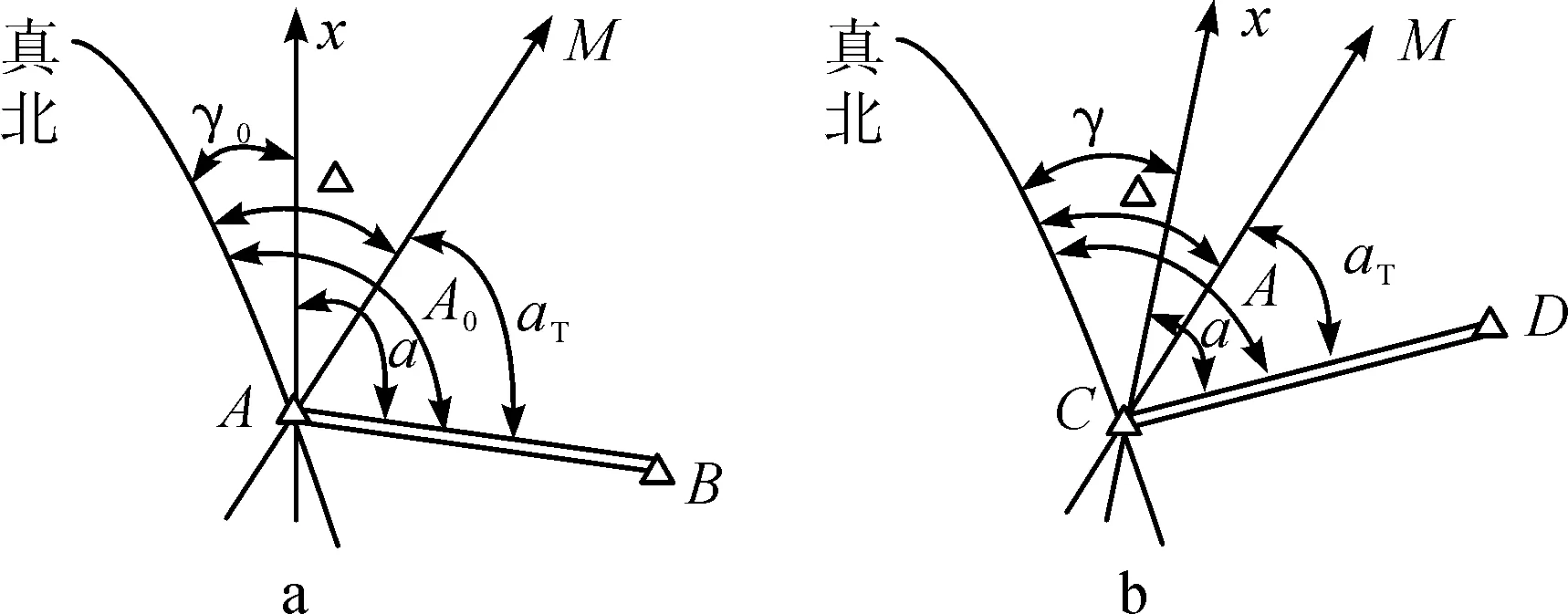
图1 陀螺定向示意图Fig.1 Schematic diagram of gyro orientation
在图1(a)中,AB边的地理方位角A0是已知条件,将陀螺仪放置A点进行定向测量,显示AB边陀螺方位角为αT,仪器常数的公式:
Δ=A0-αT
(1)
(2)在井下测定陀螺方位角。同样借助定向边CD,将陀螺经纬仪放置到C点,对CD边进行陀螺定向测量;为保证数据可靠性,最少测量2次,获取CD边陀螺方位角,用αT′表示。CD边的地理方位角A可由公式计算:
A=α′T+Δ
(2)
(3)仪器返回地面后再次测定Δ。仪器上井后,对原已知边AB再次测量,至少测量2次,将此次测量结果与(1)中的获得的陀螺仪器常数值进行对比,求出仪器常数算数平均值;然后计算均方误差,可采用白塞尔公式:
(3)
(4)求子午线收敛角。子午线收敛角也可通过查子午线收敛角系数表获取,也可计算获取。由图1可知各个角度之间的关系,子午线收敛角γ可由坐标方位角和地理方位角表示:
γ0=A0-α0
(4)
(5)求井下定向边的坐标方位角[6]。根据图1及上述步骤中得到的各个角度,可得仪器常数与地理方位角和陀螺方位角之间的关系,CD边的坐标方位角:
(5)
2 陀螺定向测量数据处理算法构建
2.1 定转子电流特征
以GAT高精度磁悬浮陀螺全站仪为实验对象进行研究。磁悬浮陀螺采用双位置差分寻北模式,在精寻北过程对2个位置进行定子和转子电流数据采集,共计40 000组;需要对海量数据做出处理,最终得出寻北结果。在外界环境的干扰下,陀螺精密仪器定向测量采集到的定子和转子电流数据往往会有不同的特征。因此,探究定转子电流特征是陀螺精密定向测量数据处理的基础环节。陀螺仪在寻北测量中,其灵敏部壳体是静止状态,灵敏部壳体上的力矩器定子电流较为稳定;而陀螺灵敏部则是处于动态平衡过程,因此陀螺仪灵敏部力矩器转子电流变化较为特殊[7-8]。对定转子电流进行探究可反映出陀螺定向测量数据特征,定转子电流数据的检验与分析通常会包括其平稳性、周期性、正态分布特性等。外界环境对定子电流特征的影响较小,不同环境下定子电流变化都较为平稳,近似服从正态分布。实验环境下无法避免各项干扰因素,因此转子电流通常不具有平稳性,其数据不服从正态分布;在不同的环境下,周期性特征也不同[9]。
2.2 LFU算法原理
GAT高精度磁悬浮陀螺全站仪会先进行粗寻北测量,在此基础上对2个位置进行精寻北测量,每个位置分别有20 000组定转子电流值;40 000组数据中通常会有一部分受外界干扰而无效的数据。需要使用合适算法将其中受干扰较为严重的数据尽可能地去除,以保证数据处理效率和定向结果精准性;此实验选择LFU算法辅助进行数据处理。计算机在数据处理中通常会将使用频率高的数据储存到高性能缓存介质上[10]。LFU是一种以访问频率为依据的缓存淘汰算法,其中每一组数据都有一个计数器对其访问频率进行记录,在需要缩减数据量时,依照各组计数器信息对数据条目进行排序,保留使用频率高的数据条目,去除访问频率低的,以达到数据淘汰的目的[11]。
2.3 基于定转子电流分布特征数据处理算法
借助LFU算法并依据定转子电流分布特征,对陀螺精密定向测量后数据进行处理。设计了一种基于定转子电流分布特征的数据处理算法。数据处理算法流程如图2所示。
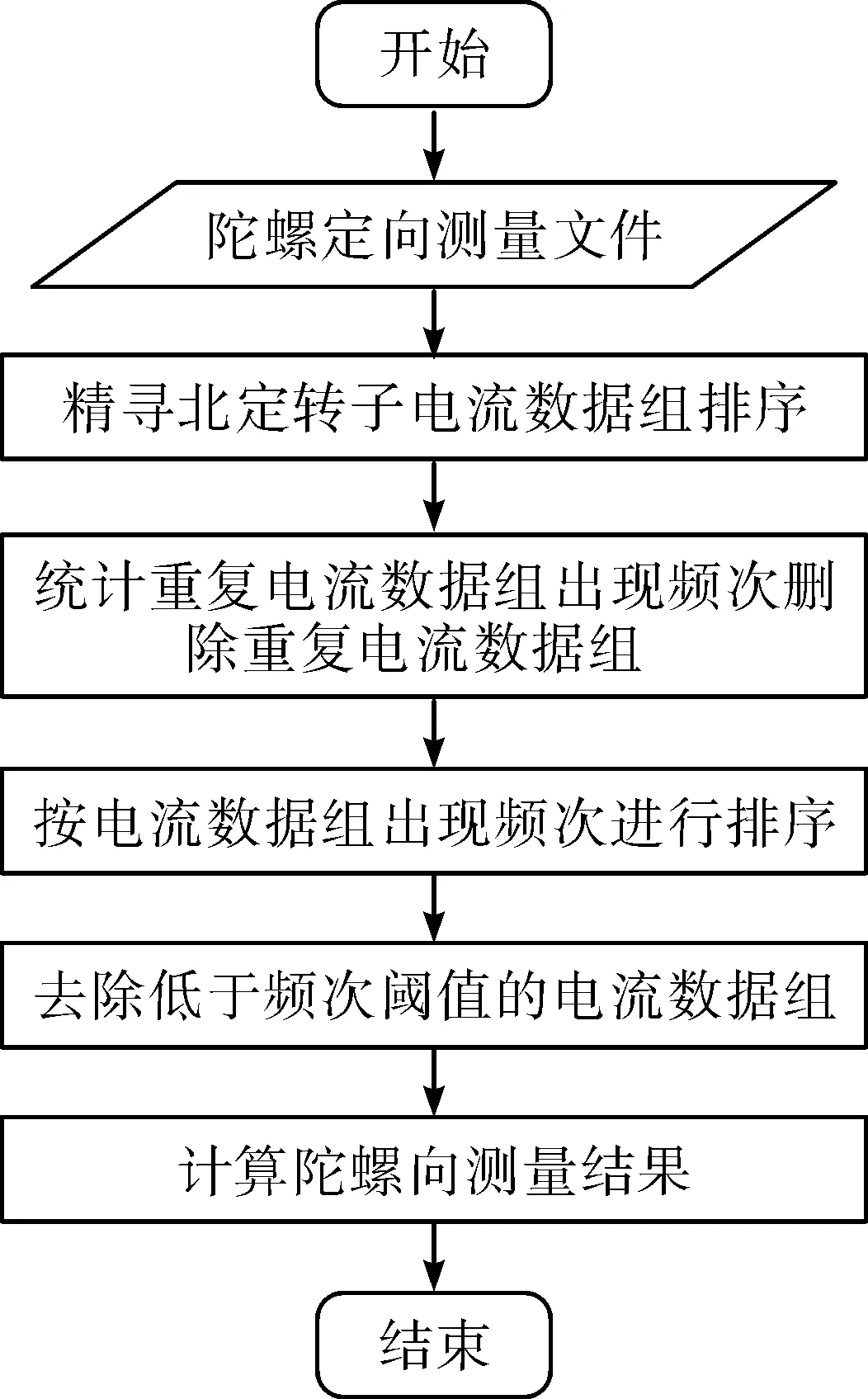
图2 基于定转子电流分布特征数据处理算法流程Fig.2 Processing algorithm flow based on characteristic data of fixed rotor current distribution
由图2可知,读取GAT高精度磁悬浮陀螺全站仪定向测量的观测文件,其中包含精寻北测量的共计40 000组定转子电流数据;之后按照定子电流数值从小到大排序。排序之后统计重复的数据组出现频次,将重复的数据组删除;然后剩下的数据组按照出现频次进行排序,并与频次阈值做对比,小于频次阈值的电流数据组可能是个别异常情况下的数据,将其删除。最终以这些剩余数据为基础计算陀螺精密定向测量结果。下一步对转子电流干扰环境下的陀螺数据进行验证分析[12]。
3 干扰状态下陀螺精密定向测量数据处理
3.1 转子电流弱干扰状态下陀螺数据处理
采用上述设计基于定转子电流分布特征的算法,对2种干扰状态下的陀螺精密定向测量数据进行处理与分析。弱干扰状态下,转子电流较为稳定,陀螺定向测量结果偏差较小,通过合理选择阈值,能够在保障定向测量结果精准度基础上纠正偏差。弱干扰状态下数据处理与分析过程:选取弱干扰状态下的陀螺定向测量数据,转子电流值为-2×10-4~1.5×10-4A,从10 000组开始到15 000组之间的转子电流数据受到干扰。以此转子电流弱干扰状态下的数据组为例进行数据处理实验。设计29个数据淘汰频次阈值,在不同频次阈值下,分别计算陀螺精密定向测量方位角结果,记录频次阈值表如表1所示。
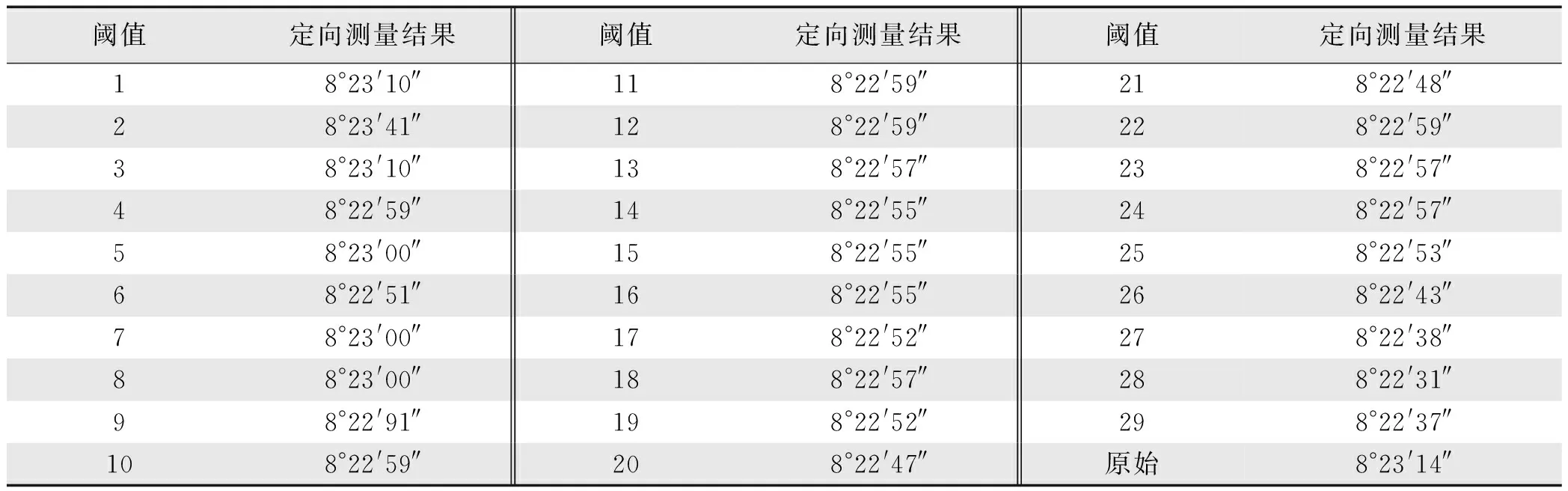
表1 弱干扰下陀螺测量数据淘汰频次阈值表Tab.1 Elimination frequency threshold table of gyro measurement data under weak interference
将淘汰频次阈值设置为1时,可将出现频次小于等于1的定转子电流数据组剔除。原始定向测量数据为8°23′14″,在阈值1~3内,定向测量数据减小为8°23′1″,变化幅度为13 s;这是因为将受到弱干扰的低频次定转子电流数据组淘汰之后,数据组的定向结果更加合理。在阈值取3~16时,定向测量结果相对稳定,变化不大,说明阈值在此范围内选取较为合理。将淘汰频次阈值设定为10时,根据转子电流序列观察到,数据处理之后的效果图相比原始电流序列分布更加集中,受干扰的电流数据显著减少,基本去除了异常的数据。结果表明,采取此数据处理算法,在转子电流弱干扰状态下,通过选取合适淘汰频次阈值,可过滤掉部分受到干扰的异常数据,陀螺定向测量结果更加合理可靠[13]。
3.2 转子电流强干扰状态下陀螺数据处理
强干扰环境下,陀螺定向测量结果往往与实际值有着较大的差别,测量结果不够准确。针对强干扰状态下的测量数据进行处理后,可能处理结果与原观测值有一定差距;但是,去除掉异常数据组之后的定向测量结果是较为稳定的,转子电流序列会相对集中一些。
选取强干扰环境下的陀螺定向寻北数据组,依据上述设计算法进行处理。精寻1位置时的陀螺定向测量数据后段异常数据较多,转子电流在14 000~20 000组数据时受干扰较为严重,精寻2位置的转子电流相对平稳,其转子电流值均位于-4×10-4~4×10-4A。采用设计的基于定转子电流分布特征并结合LFU算法的数据处理算法,对此类数据组展开数据处理与分析,记录陀螺定向测量结果,具体如表2所示。
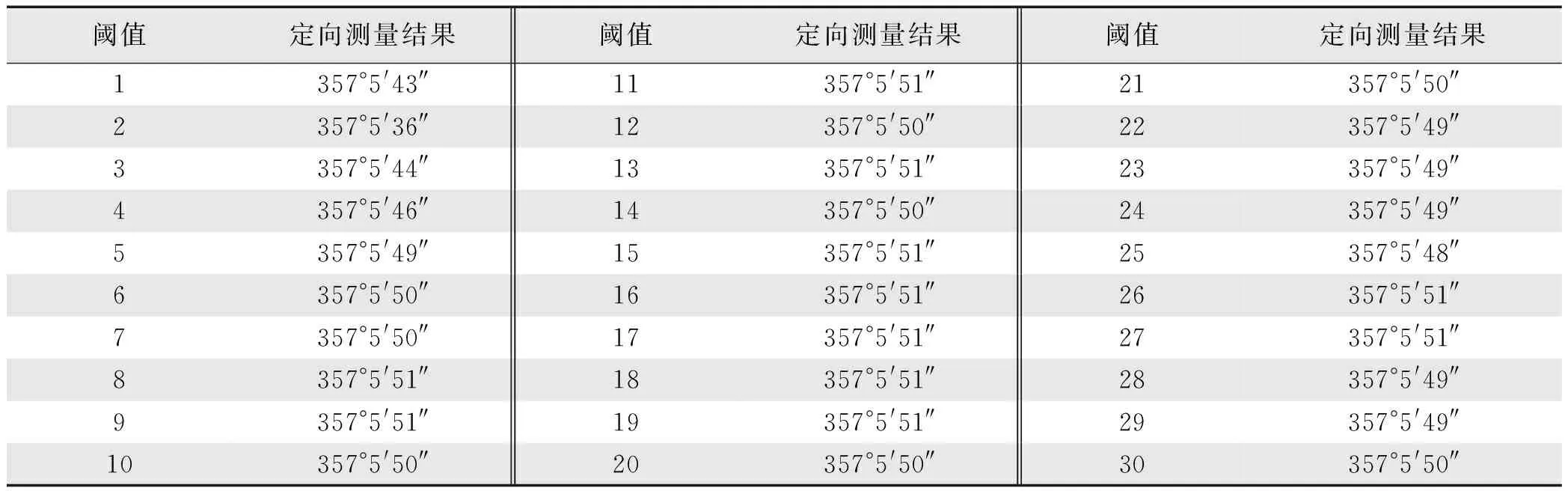
表2 强干扰下陀螺测量数据淘汰频次阈值表Tab.2 Elimination frequency threshold table of gyro measurement data under strong interference
频次阈值大于30以后,定向结果与原始结果差距较大,表2只统计了阈值为1~30的定向测量结果。原始测量结果为357°6′14″,可计算所有阈值下的定向测量结果平均值,将每个阈值结果与平均值做对比。在阈值小于4时,陀螺定向测量结果小于平均值,且差距较大,变化趋势明显。说明出现频次低于4的数据多为受到干扰的定转子电流数据组,因此,设定淘汰频次阈值后,定向测量结果更加合理[14]。在阈值为4~30时,陀螺定向测量结果变化较小,相对平稳;当阈值为10时,精寻1和精寻2的转子电流处理效果较为明显,有效去除了数据组中的受干扰数据,采用该算法处理后的转子电流分布更集中[15]。
4 结语
综上所述,以GAT高精度磁悬浮陀螺全站仪为实验对象,对其定向测量数据进行处理。通过对定转子电流分布特征的分析,结合计算机领域的LFU缓存淘汰算法,设计了一种干扰状态下陀螺精密定向测量数据处理方法。采用该方法分别对弱干扰状态和强干扰状态下的陀螺定向测量数据组进行处理,均能够有效去除数据组中受到干扰的数据,可促进陀螺定向测量精度的提升。
