双电机独立驱动方程式赛车横摆力矩控制策略
2023-01-05林巨广徐群龙胡陈林
林巨广, 徐群龙, 胡陈林, 范 诚
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引 言
首届中国大学生电动方程式汽车大赛于2015年11月在上海F1赛道举办[1]。与集中式驱动电动汽车相比,分布式驱动电动汽车具有驱/制动力独立可控的特点,扭矩响应更快、控制精度和传动效率更高[2],因此被电动方程式赛车广泛采用。电动方程式赛车无转向助力装置,故转向时仅靠方向盘驱动。低速时,横摆角速度较小,处于转向不足状态,需实现助力转向;高速时,质心侧偏角较大,需控制车身稳定性。通过直接控制驱动电机,产生附加横摆力矩,能够提高车辆的操纵性与行驶安全性[3]。
目前,国内外针对分布式电动汽车直接横摆力矩已有一定的研究,但针对电动方程式赛车的直接横摆力矩研究较少。文献[4]采用PI控制横摆角速度,计算车辆直接横摆力矩,利用差动驱/制动转矩协调控制策略分配转矩,但控制策略只适用于低速情况下质心侧偏角较小的工况;文献[5]设计了一种神经网络,估算直接横摆力矩;文献[6]利用单一模糊控制方法计算出横摆力矩,进行稳定性控制;文献[7]以中性转向为控制目标计算理想横摆角速度,通过控制横摆角速度提高方程式赛车的横摆稳定性;文献[8]通过神经网络PID优化算法计算横摆力矩,制定最优分配策略,对横摆角速度进行控制,但未对质心侧偏角进行主动控制;文献[9]设计了分层控制的横摆稳定性控制器,采用滑模控制方法计算直接横摆力矩,但滑模控制易带来抖振;文献[10]通过模糊神经网络算法对横摆角速度和质心侧偏角进行控制,提高车辆的稳定性,但未考虑低速时需要进行助力转向。
本文以后置双驱方程式赛车为研究对象,设计了一种基于联合模糊控制的直接横摆力矩双层控制策略。上层以横摆角速度和质心侧偏角为跟踪对象,根据车速采用加权模糊策略,制定横摆力矩;下层根据电机特性进行横摆力矩分配。联合模糊控制综合横摆角速度与质心侧偏角的优点,解决了高速时车辆的稳定性控制问题。针对常用硬件在环系统所需专业设备较多的问题,设计了基于Simulink/CarSim环境的硬件在环试验平台,实现硬件在环仿真,以验证控制策略的可行性,并提供适用于大学生电动方程式赛车的硬件在环方案。
1 直接横摆力矩控制策略
本文所提出的直接横摆力矩双层控制结构如图1所示。
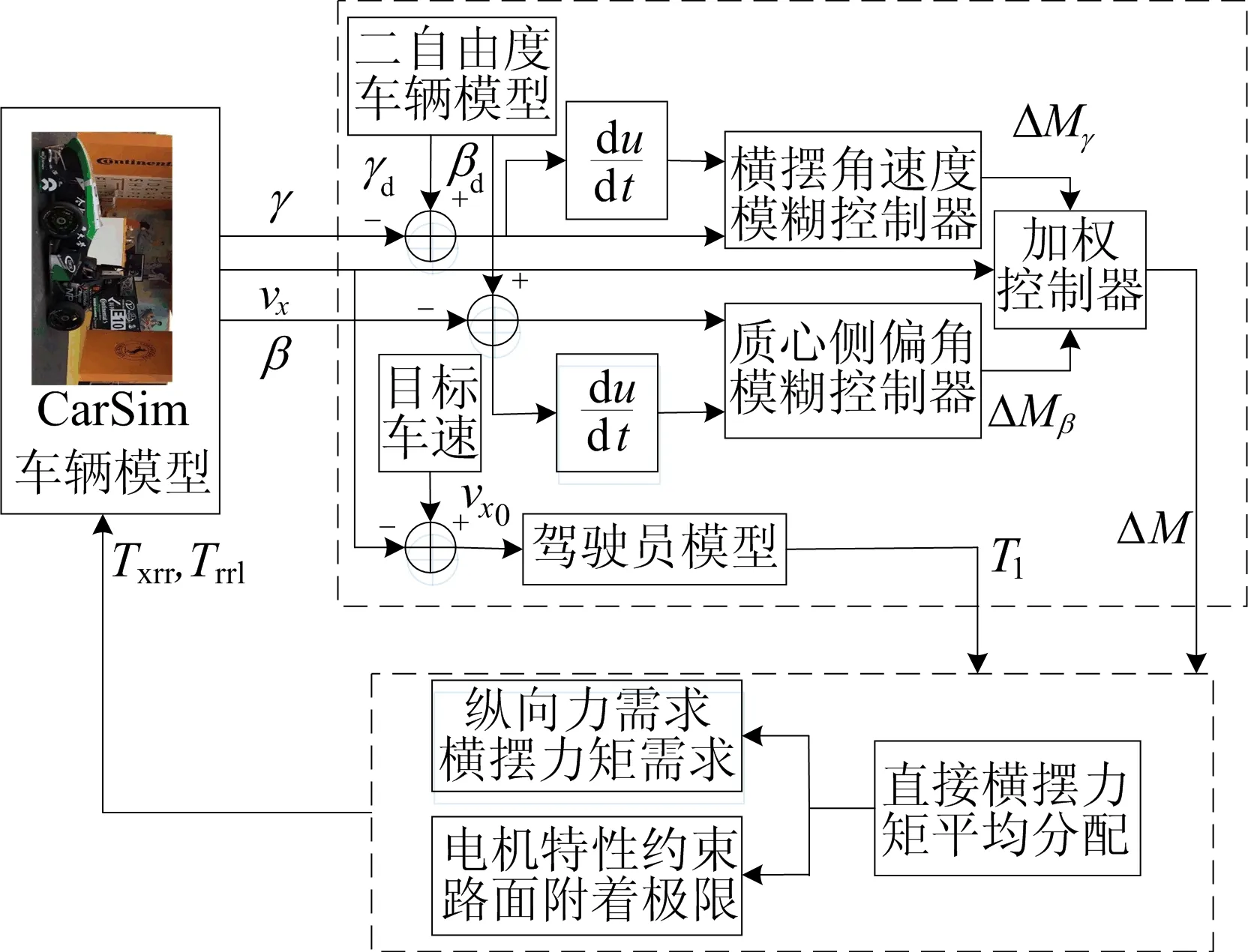
图1 直接横摆力矩控制策略结构
上层为运动跟踪控制层,根据CarSim模型反馈的行驶状态参数(当前车速vx、前轮转角δ、横摆角速度γ、质心侧偏角β、车轮转速nl、nr等),结合二自由度参考模型得到理想横摆角速度γd和理想质心侧偏角βd,将偏差及其变化率作为模糊控制器的输入,再根据模糊策略计算维持车辆稳定行驶所需的附加横摆力矩ΔM,输入到下层控制器;下层控制器为扭矩分配层,基于电机外特性,结合路面附着极限、电机约束以及纵向力与横摆力矩需求,得到左后与右后电机驱动转矩,再乘以传动比系数,得到两轮转矩Tl、Tr输入到车辆模型,实现车辆的稳定性控制。
车辆行驶稳定性主要包括:
(1)机动稳定性问题,其评价指标为横摆角速度,主要由车轮的纵向力和侧向力所产生的横摆力矩决定。
(2)车轮的侧向运动引起的质心轨迹偏离问题,评价指标为质心侧偏角。
为了便于得到车辆稳定状态的横摆角速度和质心侧偏角的理想值,一般采用线性二自由度模型,如图2所示。
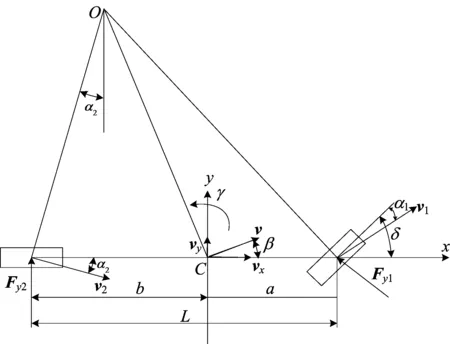
图2 二自由度车辆模型
假设vx为定值,忽略了轮胎的非线性以及轮胎的侧偏特性,只有车辆沿y轴的侧向运动和绕z轴的横摆运动。
由轮胎侧向力和侧偏角的关系以及β=vy/vx,可得二自由度车辆模型微分方程为:
(1)
其中:δ为前轮转角;Iz为整车绕z轴的转动惯量;a、b为整车质心到前后轴的距离;kf、kr为前、后车轮侧偏刚度;vx、vy为汽车质心处的纵向、侧向速度;γ为横摆角速度;β为质心侧偏角。
仅考虑稳态转向的情况,此时vy′、γ′均为0,代入(1)式,得到横摆角速度和质心侧偏角的稳态值为:
(2)
(3)
考虑路面附着条件,参考文献[11],得到横摆角速度和质心侧偏角的期望值为:
(4)
(5)
2 模糊控制器设计
模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的智能控制方法[12]。模糊控制方法的特点是不需要建立精确的被控对象数学模型,其结构简单、鲁棒性强,控制效果依赖于控制变量的控制规则。车辆的稳定性可以通过横摆角速度实际值与理想值的偏差和质心侧偏角实际值与理想值的偏差进行评价,偏差越小,稳定性越好。
本研究选用双输入单输出的Mamdani模糊结构来制定附加横摆力矩,联合模糊控制器结构如图3所示。
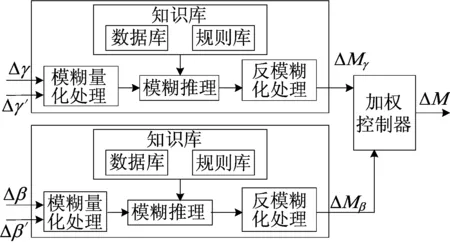
图3 联合模糊控制器结构
在方向盘转角一定时,横摆角速度先随车速增大而增大,当车速达到一定值后,横摆角速度随车速增加而减小,并且超过一定值后,横摆角速度只与车速有关,与方向盘转角无关。低速时,质心侧偏角较小,对整车稳定性的影响较小,横摆角速度可以表征车辆的横摆稳定性,仅对其单独控制即可;高速时,横摆角速度、质心侧偏角增加到一定值,横摆角速度已经难以反映车辆的运动状态,此时需要单独控制质心侧偏角;在2种状态之间,可采用加权系数同时对横摆角速度和质心侧偏角进行控制。
得到的加权控制逻辑公式如下:
(6)

v1、v2的选择根据双移线仿真结果确定。v1≤10 m/s时,质心侧偏角、侧向加速度均较小,此时横摆角速度可以表征车辆的稳定性;v2≥30 m/s时,侧向加速度大于0.4g,轮胎处于非线性区域,此时应控制质心侧偏角。
双移线能够反映车辆的操纵稳定性,在CarSim的仿真设置中选择Driver path follower→Double Lane Change设置,基于Simulink与CarSim联合仿真平台,分别仿真得到车辆无控制时,3种车速下的理想横摆角速度、质心侧偏角与实际值的差值及侧向加速度,结果如图4所示。根据仿真结果,制定模糊控制的基本论域。

图4 无控制双移线仿真结果
2.1 模糊规则制定
由图4可知,车辆车速为10 m/s和20 m/s时,侧向加速度都小于0.4g,轮胎处于线性稳定区域;当车速为30 m/s时,侧向加速度峰值大于0.4g,轮胎处于非线性区域。由仿真结果可得:Δγ的基本论域为[-0.1,0.1],Δβ的基本论域为[-0.03,0.03],ΔM的基本论域为[-600,600];取量化因子kγ=60、kβ=200、kM=100,使输入输出模糊论域均为[-6,6]。Δγ、Δβ、ΔM的模糊集均为{NB,NM,NS,ZE,PS,M,PB},分别对应负大、负中、负小、零、正小、正中、正大。模糊控制器输入的隶属度函数采用trimf形式,输出的隶属度函数采用gaussmf形式,其隶属度函数如图5所示。
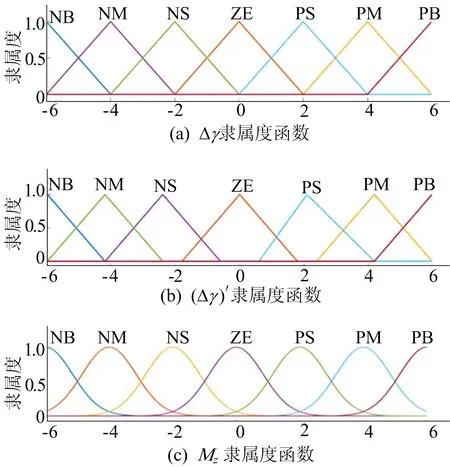
图5 模糊规则的隶属度函数
根据经验制定模糊规则:当横摆角速度误差Δγ为正时,应为车辆施加一个负的横摆力矩以跟踪期望的横摆角速度;当Δγ为负时,应为车辆施加一个正的横摆力矩,并根据此时横摆角速度误差的变化率(Δγ)′决定附加横摆力矩的等级。
横摆角速度模糊控制规则见表1所列,此模糊控制策略为γ-模糊控制。
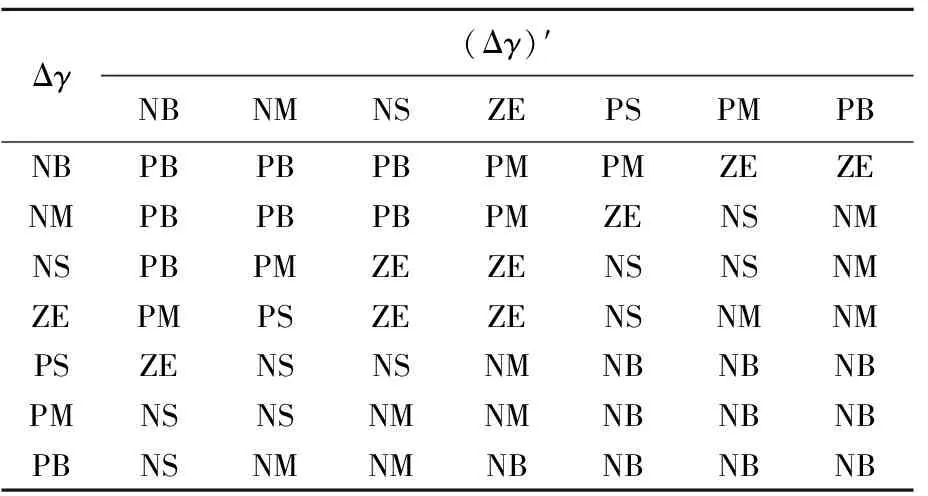
表1 横摆角速度模糊控制规则
根据β-Method理论[12],当质心侧偏角很小时,横摆力矩随质心侧偏角的增加而增加,此时汽车趋于稳定,随着质心侧偏角的增加,车辆逐渐进入失稳状态,横摆力矩随着质心侧偏角的增大而减小。因此当质心侧偏角偏差Δβ与质心侧偏角偏差变化率(Δβ)′为NB时,横摆力矩输出应为PB。质心侧偏角模糊规则见表2所列,此模糊控制策略为β-模糊控制。

表2 质心侧漏角模糊控制规则
2.2 模糊控制器介入门限值
为避免控制器对车辆频繁控制,应设置合适的介入门限。通过仿真实验,选取合理的γ、β介入值,以避免整车控制器(vehicle control unit,VCU)频繁控制进行大量的计算,同时可以抑制γ、β过0时,系统产生震荡。
国有企业一直是中国经济的重要支柱力量,在整个经济社会中占有重要地位。根据2017年第一季度财政部信息统计,国有企业在资产总额、营业收入、净利润方面都有着不错的表现。和去年同期相比,总资产增长10%,达140万亿元。国有资本扮演着重要角色,贡献巨大的力量,但也面临着效率不高的难题。
3 横向稳定性控制器横摆力矩分配
3.1 电机数学模型
由于本文只研究车辆横摆稳定性的控制,电机作为车辆行驶的动力源,对电机模型的精度要求不高。采用直接转矩控制方式,结合电机外特性曲线,在Simulink中建立电机模型。引入电机时间常数tc,若不考虑电感和阻尼对电机的影响,可将电机化简为一阶系统,可得:
(7)
其中:T为实际转矩;Tm为需求转矩。
由电机外特性曲线及加速踏板开度φ,可以得到当前需求转矩Tm为:
(8)
3.2 驾驶员模型
驾驶员模型基于PI算法设计,输入为实际车速与目标车速的差值,输出为加速踏板的开度φ,Kp为比例控制系数,Ki为积分控制系数。驾驶员模型通过PI控制,调节加速踏板开度,产生速度补偿扭矩,使实际车速良好地跟踪目标车速。驾驶员模型是为了硬件在环仿真时使车辆保持在设定速度而设置的,可以通过标定量实现模块是否调用。
3.3 横摆力矩的平均分配
直接横摆力矩控制策略的下层是横摆力矩的分配策略,本文通过基于电机特性的横摆力矩平均分配。由于车辆的动力结构是后置双驱,附加的横摆力矩只能分配在左后和右后2个驱动轮上,即对相应的车轮采取制动或驱动模式,车辆后轮中的一侧减少转矩,另一侧增加转矩的方法实现附加横摆力矩。当车辆左转出现不足转向时,左后轮减少转矩,右后轮增加转矩,可以使车辆产生逆时针的横摆力矩促进转向;当左转出现过度转向时,左后轮增加转矩,右后轮减少转矩,可以使车辆产生顺时针的横摆力矩抑制转向。右转同理。
采用平均分配进行横摆力矩分配时,附加横摆力矩需满足纵向力矩以及轮胎纵向力的限制,则有:
Txd=Txrl+Txrr
(9)
(10)
Txri=T1±ΔT
(11)

车辆的纵向力受到电机峰值转矩和路面附着条件限制,故有:
Txri=min(μFzriR,Tmax)
(12)
其中,Tmax为电机峰值扭矩。
4 仿真及试验
4.1 控制策略仿真验证
为了验证本文所提出的控制策略的有效性,基于CarSim与Simulink联合仿真平台进行稳定性仿真验证。在Simulink中搭建附加横摆力矩控制器、驾驶员模型、电机转矩分配控制器;基于电动方程式赛车,在CarSim中建立整车模型,整车参数见表3所列。
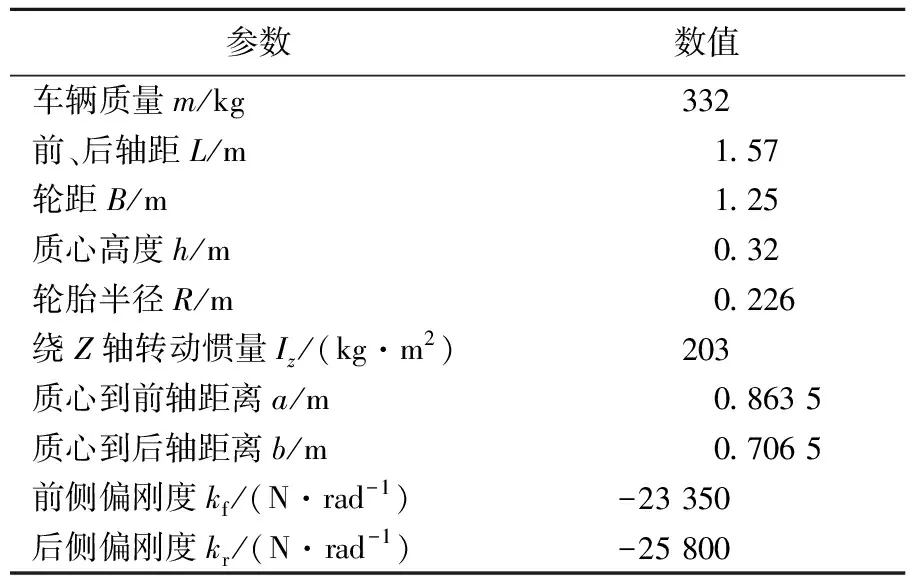
表3 电动方程式赛车仿真模型参数
基于直接横摆力矩控制策略仿真模型如图6所示。在CarSim中设置仿真工况,方向盘转角开环输入、输入输出接口与Simulink分层控制策略连接。联合CarSim与Simulink进行双移线工况仿真实验。为了对提出的控制策略进行验证,分别进行了无控制、模糊控制及联合模糊控制几种策略下的双移线仿真。
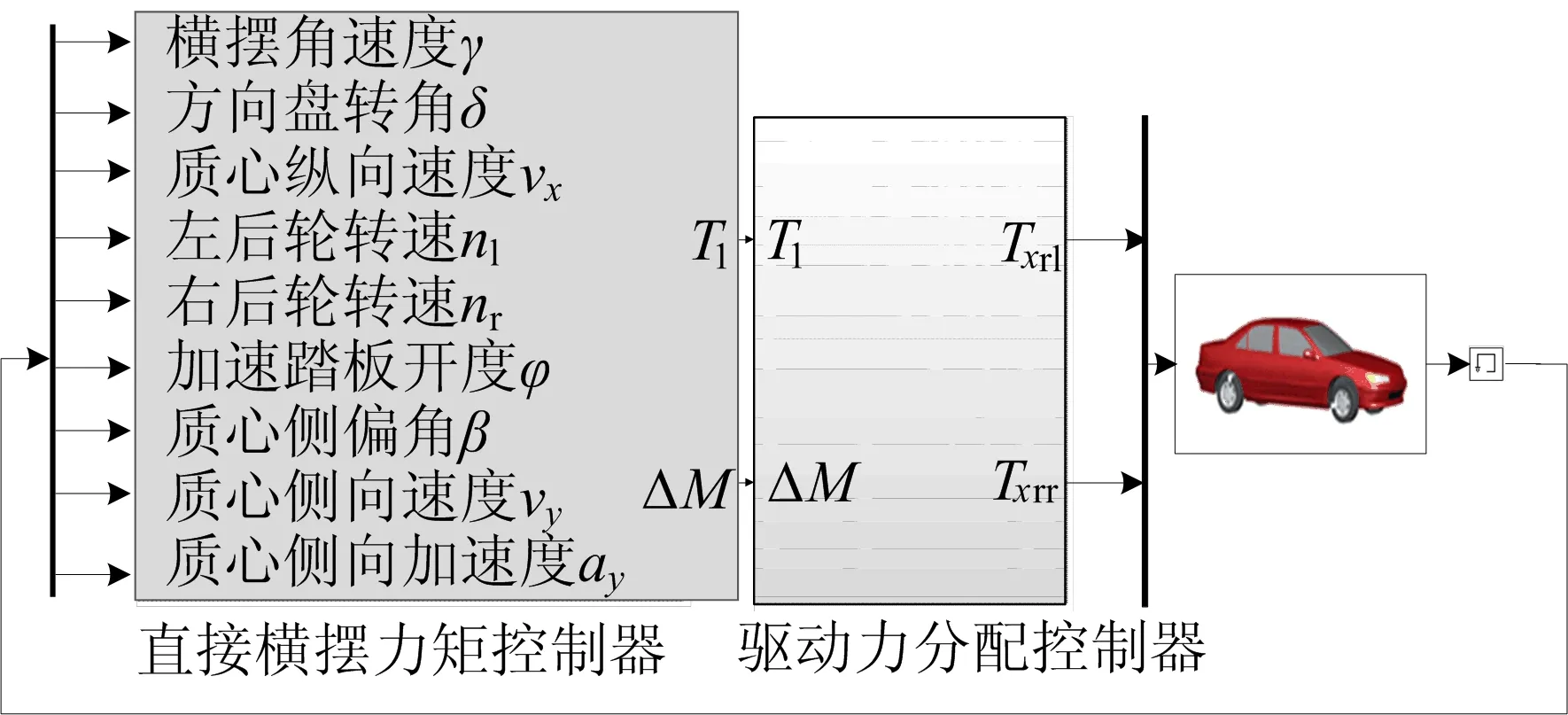
图6 基于直接横摆力矩控制策略的仿真模型
因为方程式赛车在转向时车速多处于30~60 km/h范围,所以采取72 km/h车速下测试双移线工况,保证安全裕度,仿真结果如图7所示。
从图7可以看出:γ-模糊控制策略对横摆角速度跟踪效果好,但对质心侧偏角控制效果较差,实际值超出理想值,而且随着速度增加,超出量也增加,使车辆进入不稳定状态;β-模糊策略对质心侧偏角跟踪较好,但实际横摆角速度小于理想值,低速时差值较大;联合模糊控制策略结合2种控制策略的优点,在低速时以γ-模糊控制为主,保证横摆角速度的跟踪,实现助力转向,在高速时以β-模糊控制为主,保证车辆的稳定性。

图7 双移线工况下仿真结果
为研究联合模糊控制策略的适用性,将联合模糊控制策略应用于分布式驱动模式,通过模糊控制策略制定直接横摆力矩;采用单侧轮控制,按前、后轴驱动扭矩分配比例分配直接横摆力矩,将前、后轴的直接横摆力矩均分到左、右电机,通过开环双移线工况验证联合模糊控制策略。
利用横摆角速度、电机扭矩、车轮转速等来对比联合模糊控制策略在后置双驱驱动模式和分布式驱动模式中的控制效果,2种驱动模式仿真结果如图8所示。
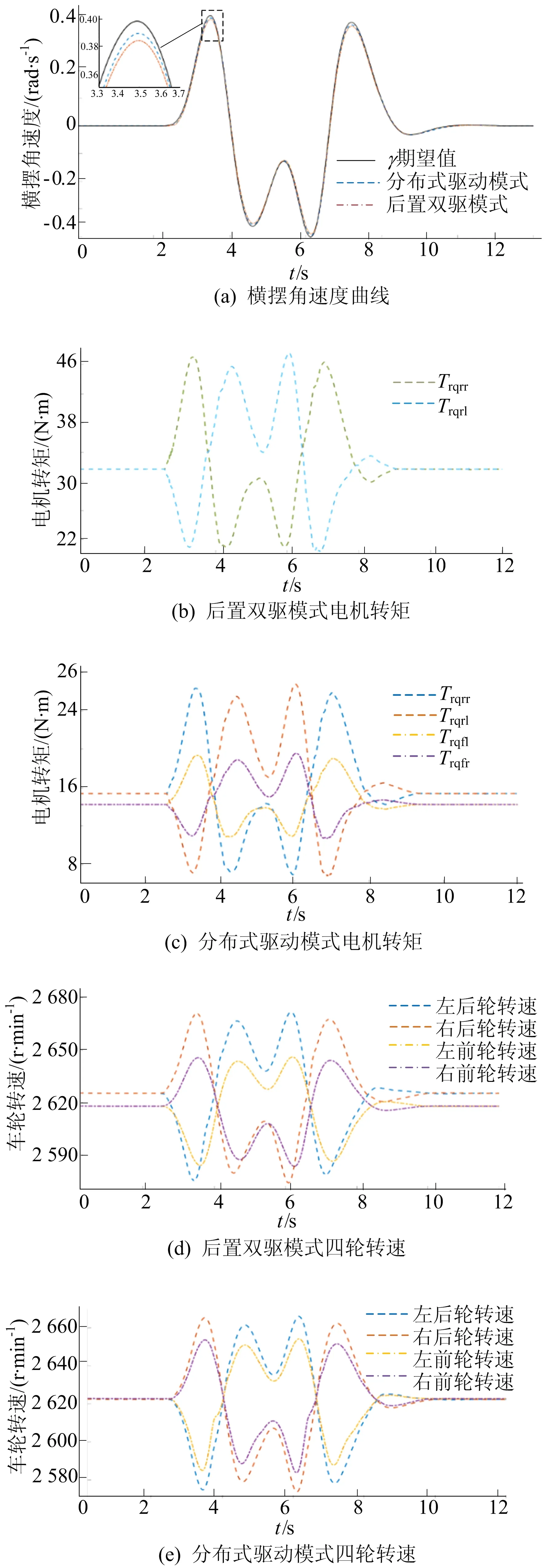
图8 后置双驱与分布式驱动仿真对比
从图8可以看出,联合模糊控制策略应用于分布式驱动模式仍有良好的控制效果,其控制效果优于后置双驱驱动模式。分布式驱动由于动力元件均布,可以实现较好的控制;后置双驱模式只有2个驱动元件,只能将直接横摆力矩分配在2个电机上,可附加的横摆力矩能力低于分布式驱动,由于驱动模式的固有结构,后置双驱模式前、后轮会存在滑移率差值,而分布式驱动可以通过控制前、后轴驱动力矩,消除前、后轮滑移率的差值。因此可用于后置双驱模式的控制策略在分布式驱动中也具有适用性。
4.2 硬件在环试验
传统的硬件在环试验平台由VCU控制器、HIL机柜、被控对象、实时仿真软件等部分组成,系统较为昂贵。为验证算法的有效性,本文利用现有设备,设计硬件在环试验平台,如图9所示。

图9 硬件在环仿真平台
基于Simulink/CarSim环境,在PC端的Simulink中调用Real-Time模块进行实时仿真,调用CANCommunication模块配合Kvaser硬件实现PC端与VCU(MPC5554)硬件间的CAN通信。VCU运行整车控制程序,PC端运行CarSim及Simulink,台架部分为被控对象及环境。通过PC、VCU及台架完成硬件在环试验,使用TSMaster软件进行CAN总线数据采集和分析,使用MeCa实时观测模型内部变量及修改标定量,实时仿真步长为1 ms。进行车速为72 km/h、路面附着系数为0.8的双移线硬件在环试验,对联合模糊控制策略进行验证,试验结果如图10所示。
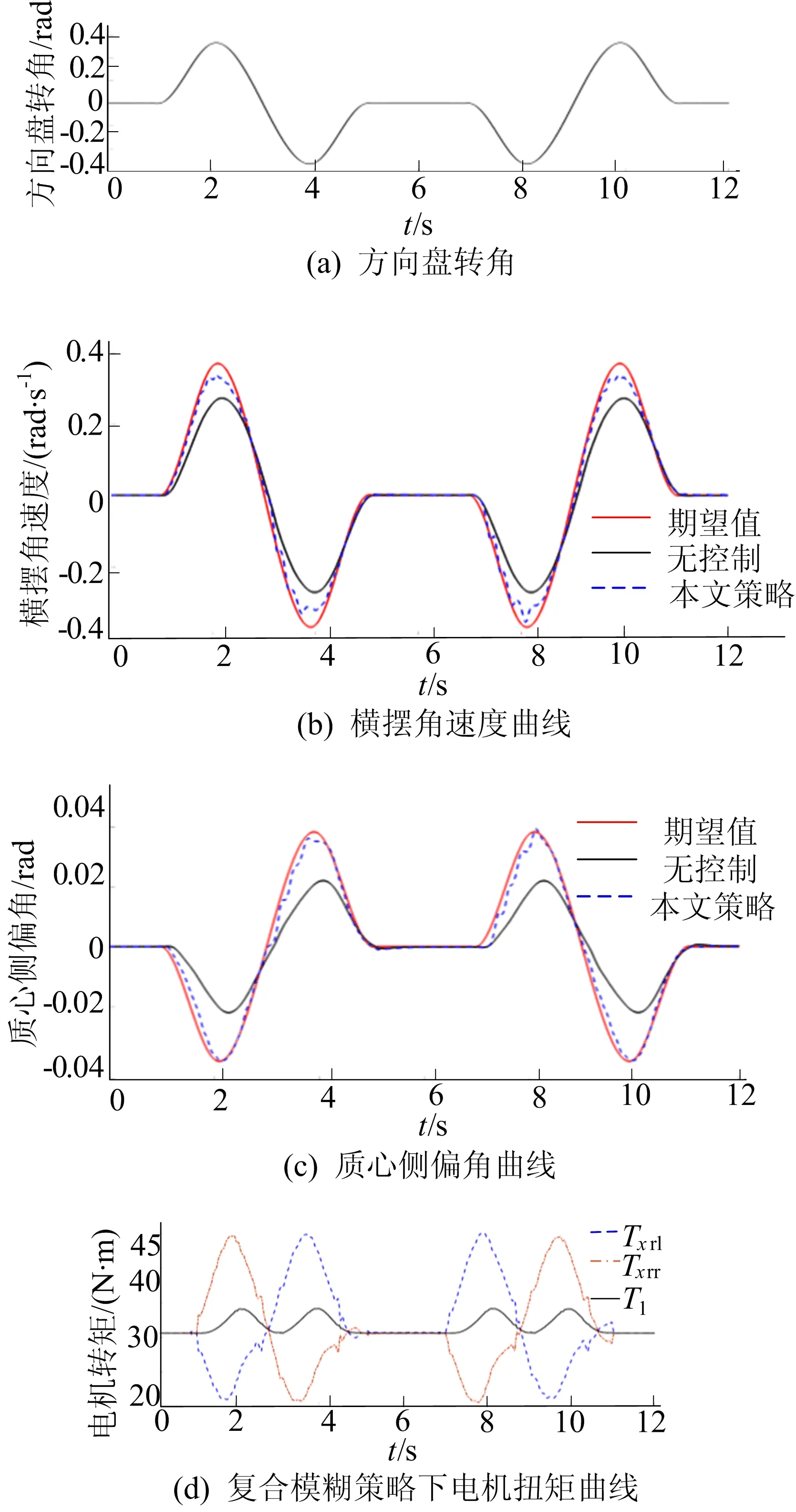
图10 双移线工况硬件在环仿真结果
从图10可以看出,无控制时,横摆角速度和质心侧偏角都偏离期望值,此时横摆角速度和质心侧偏角都小于理想值,处于不足转向状态,操纵性不佳;而联合模糊控制策略,在实际质心侧偏角小于理论质心侧偏角时,2种模糊策略同时输出正的横摆力矩,实现了助力转向。在实际质心侧偏角大于理论质心侧偏角时,β-模糊控制起主要作用,输出负的横摆力矩,控制质心侧偏角趋于期望值,此时横摆角速度被抑制增加,质心侧偏角被控制在2.5°以内。
5 结 论
本文以双电机独立驱动方程式赛车为研究对象,利用其驱动力矩独立可控的优点,设计了直接横摆力矩双层结构控制策略,上层根据联合模糊策略得到期望横摆力矩,下层根据电机特性进行横摆力矩分配。
基于CarSim与Simulink联合仿真平台,进行双移线工况仿真。仿真结果表明:低速时,增加实际横摆角速度,实现助力转向;高速时,控制质心侧偏角实现稳定性控制。同时进行了后置双驱与分布式驱动的联合模糊控制仿真对比。
基于方程式赛车已有硬件,结合Simulink/CarSim环境,设计了适用于电动方程式赛车的硬件在环试验平台,利用现有工具链实现硬件在环试验,试验结果表明整车控制策略可以改善方程式赛车的操纵性与稳定性。设计的硬件在环方案,解决了大学生电动方程式赛车的硬件在环测试问题,有效提高了算法开发进程。
