一种新的概率逼近遍历算法在雷达布站的应用
2023-01-04周红进兰国辉王翔宇
周红进, 兰国辉*, 李 伟, 王翔宇
(1.海军大连舰艇学院 航海系,辽宁 大连 116018; 2.大连船舶重工集团有限公司 军工部,辽宁 大连 116019)
基于到达时间差(Time Difference of Arrival,TDOA)的无源雷达组网跟踪探测目标的首要问题是确定组网雷达的布站方案[1]。确定雷达布站方案过程通常分2步实现:首先,确定评价布站方案优劣的指标;然后,根据评价指标设计寻优算法,搜索最优布站方案。
随着雷达信号处理技术的发展,评价指标也随之改变。早期采用目标发现概率和漏警率等指标,现代雷达主要采用目标跟踪定位精度指标[2-4]。孙旭锋和杨益川[5-6]采用了目标跟踪定位误差的均方根(Root Mean Square,RMS)描述跟踪定位的精度,这种方法简单直接且易于计算,但是不能反映出目标与组网雷达的相对空间关系对跟踪定位精度的影响。Hu等[7]采用了克拉美罗下界(Cramer-Rao Lower Bounds,CRLB)指标,较好地解决了文献[5]和文献[6]中所提方法的不足,但是由于CRLB计算过程复杂,当组网雷达站超过3个时,计算量将显著增加,导致后续以该指标为评价函数设计的寻优算法难以实现。针对上述问题,本文将卫星导航系统定位选星时描述星座构型优劣的几何精度因子(Geometric Dilution of Precision,GDOP)作为衡量组网雷达跟踪定位目标精度的指标,并基于TDOA的定位方程推导出相应的计算模型。在此基础上,通过网格化目标空域并对所有网格点计算其加权GDOP均值作为雷达布站的评价函数,避免了在目标空域对GDOP多重积分引起的计算实现难的问题,同时也可获得根据重点空域调整加权系数以实现重点空域重点关注的灵活性。
评价指标确定后,可以在目标空域建立合适的评价函数并设计寻优算法,在雷达部署区域搜索站址组合最优解,从而获得最优雷达布站方案。王德成等[8]研究了基于二进制编码的遗传算法设计寻优算法,搜索成功率可以达到85%,但存在编码长度过长、搜索速度慢和容易陷入局部最优等缺陷。文献[9]~文献[12]研究了基于多目标粒子群算法解决局部最优的问题,通过初始化多个子种群并行寻优,提高了算法执行速度,也有效避免了陷入局部最优的问题,搜索成功率高于95%,但仍然存在受初始群众分布和变异系数干扰的问题,且当评价函数改变后,需要重新设计算法,通用性偏弱,没有克服仿生类算法的固有缺陷。针对上述寻优算法存在的问题,考虑到最优雷达站址组合的搜索对实时性并无要求,设计了基于概率逼近实现的最优解遍历搜索算法,通过调整随机产生的站址组合样本规模,遍历样本以一定概率获得最优解。
在确定了组网雷达布站方案的GDOP因子评价指标并设计了大样本遍历大概率逼近的寻优算法之后,以4个雷达站组网布站组合为例,在北京超算云平台上运行搜索算法,成功搜索到了最优雷达布站站址组合方案。
1 基于TDOA的无源雷达跟踪定位模型
测量目标信号到达时间差是无源雷达跟踪定位目标的一种常用方式。若要在三维空间里确定1个点,至少需要3个距离差和4个观测点。因此,利用目标辐射信号到达时间差分定位,至少要有4个观测站。4个被动雷达站探测记录目标辐射信号到达时刻,进而获取到达时间差值,从而计算距离差。由距离差确定3个双曲面的交点,即为目标位置。
设雷达主站为S0,3个雷达副站为Si(i=1,2,3);目标坐标为(x,y,z)T,主站和副站坐标为(xi,yi,zi)T(i=0,1,2,3);目标辐射信号到达各站的时间为ti(i=0,1,2,3),目标到各站的距离为ri(i=0,1,2,3),各副站到达时间与主站到达时间的时间差可写为τi(i=1,2,3)。
将到达时间差乘光速,可得目标到各副站和主站的距离差为
Δri=cτi
(1)
这个距离差还可由目标到主站的距离减去目标到副站的距离直接得到,即
Δri=ri-r0
=[(x-xi)2+(y-yi)2+(z-zi)2]1/2-
[(x-x0)2+(y-y0)2+(z-z0)2]1/2
(2)
由式(2)可得:
(3)
(4)

(5)
式(5)应有3个,x,y,z为未知数,改写成矩阵形式为
(6)
即AX=B,其中:
根据线性方程组的线性性质,AX=B的解为AX=C解的r0倍和AX=D的解之和。根据式(6)可以计算目标的坐标。
2 雷达布站评价函数
雷达布站评价函数是衡量雷达组网跟踪探测性能的主要指标,一般采用跟踪定位目标的精度表示。单个目标的跟踪定位精度反映了雷达的锁定能力,区域目标的跟踪定位精度则反映了雷达跟踪定位的覆盖性能。通常采用区域跟踪定位精度衡量雷达组网的整体性能。
2.1 单点定位GDOP值
卫星导航系统中,在选择合适的星座进行定位时,一种有效且常用的选星指标为GDOP。借鉴卫星导航系统的GDOP的定义,推导无源雷达跟踪定位单个目标的精度计算公式。
对式(2)两边进行全微分可得:
(7)
式中:
上述方程共有3个,写成矩阵形式为
dR=HdX+dS
(8)
其中:
可见,定位误差dX由时差测量误差造成的距离差误差dR和站址误差dS决定,则有
dX=H-1(dR-dS)=(HTH)-1HT(dR-dS)
(9)
定位误差的协方差矩阵为
cov(dX)=E[dXdXT]
=(HTH)-1HT[cov(dR)+cov(dS)]H(HTH)-1
(10)
显然站址误差和距离差误差相互独立,则有
E[dRdST]=E[dSdRT]=0
设σΔri为距离差测量误差的标准差;ηij为各副站距离差的相关系数;σs为站址误差的标准差。所以3个副站的距离差协方差矩阵为
(11)
故站址误差协方差矩阵为
(12)
不同方向、不同站址的误差相互独立,互协方差为0。由此,cov(dR)+cov(dS)=[fij]3×3。
(13)
故定位的总协方差为

(14)
定位的几何精度因子可以写为
(15)
式(15)为基于TDOA的无源雷达组网跟踪定位目标的精度指标计算公式,可以看出影响其精度的因素主要有站址误差、时间差测量误差、雷达站和目标之间的相对距离。
2.2 区域GDOP值
目标飞行空域为V,则飞行空域的整体定位误差为
(16)
4个雷达站坐标已知的情况下,可以利用式(16)对目标空域的整体定位误差进行评估。
如果根据整体定位误差最小原则,确定组网布站方案,而4个雷达站的坐标全部未知,共12个未知数,积分运算量大、解析表达式复杂,计算难以实现。
2.3 网格化目标空域
假设目标空域为规则区域(非规则区域可以分解为多个规则区域),以雷达定位精度指标为标尺,可以将目标区域进行网格化,如图1所示。

图1 网格化后的目标飞行空域
设网格点集合为
U={T11,…,T1N,…,TM1,…,TMN}(i∈[1,M],j∈[1,N])
在集合U内计算GDOP值,进行加权平均后作为目标飞行空域的GDOP值,加权系数与目标空域关注度相关。将重点关注区域的加权系数调大,反之调小。则目标飞行空域整体定位误差为
(17)

将目标空域网格化后,避免了多重积分计算的复杂度。同时,可以根据目标空域关注度调整加权系数,有利于提高重点敏感区域的目标探测精度,也提高了雷达布站的灵活性和针对性。
式(17)即为雷达布站评价函数。根据该函数,在雷达站部署区域寻优4个站址,函数值最小的站址组合即为最优雷达布站方案。
3 雷达站部署方案寻优策略及结果
3.1 寻优策略
根据已知条件,雷达布站区域由4块地形组成,设4块地形区域为Ui(i=1,2,3,4)。按照1块地形布设1个雷达站的原则,在4块地形上遍历计算所有布设方案的Err(U1,U2,U3,U4),则整体定位误差最小方案为
argmin{Err(U1,U2,U3,U4)}=(S0,S1,S2,S3)
(18)
根据式(18)遍历算法得到的雷达站坐标(S0,S1,S2,S3)即为整体定位误差最小的4个雷达站的坐标。
已知目标函数和遍历空间,寻找最优站址组合的实质是一个遍历搜索最优解问题。常用的遍历算法有自回归算法、遗传算法、模糊神经网络算法、蚁群算法和粒子群算法等,这些搜索算法是在目标函数的引导下快速找到最优解。为了平衡搜索时间和精确度,通常要根据具体问题调整设置搜索参数。搜索参数的设置需要大样本数据训练获得,且通用性较弱。即使设置了合适的参数,搜索结果也容易陷入局部最优解。
由于雷达布站需要在4块独立的地形分别寻找一个站点形成一个站址组合。根据这一特点,制定了4个地形分别随机产生一个站点,根据式(17)计算目标空域总体跟踪定位误差,记录总体定位误差最小的站址组合,如图2所示。

图2 最优站址组合寻优策略
寻优策略的优点是简单直接且适合并行运算,只要寻优次数足够,一定会找到最优解;缺点是计算量大,比较耗时。
每个地形候选站点个数为n,假设随机产生的站址组合样本规模为n4时,则搜索到最优解的概率为
1-(1-1/n4)n4×100%
(19)
考虑到雷达布站方案求解并不要求实时性,且国内超算运行速度超过每秒1.25e17 次,利用国内超算提供的云计算服务可以遍历寻优到最优解。
3.2 实验结果


表1 最优站址组合寻优结果
从图3~图5可以看出,主站和3个副站的布局呈Y字形,目标空域位于Y字形闭口一侧,沿着闭口方向,随着探测距离增大,跟踪定位误差辐射状增大。可以认为,4个雷达站的布局构型与目标空域的探测精度直接关联。

图3 最优雷达布站站址和目标空域

图4 目标空域误差变化曲线
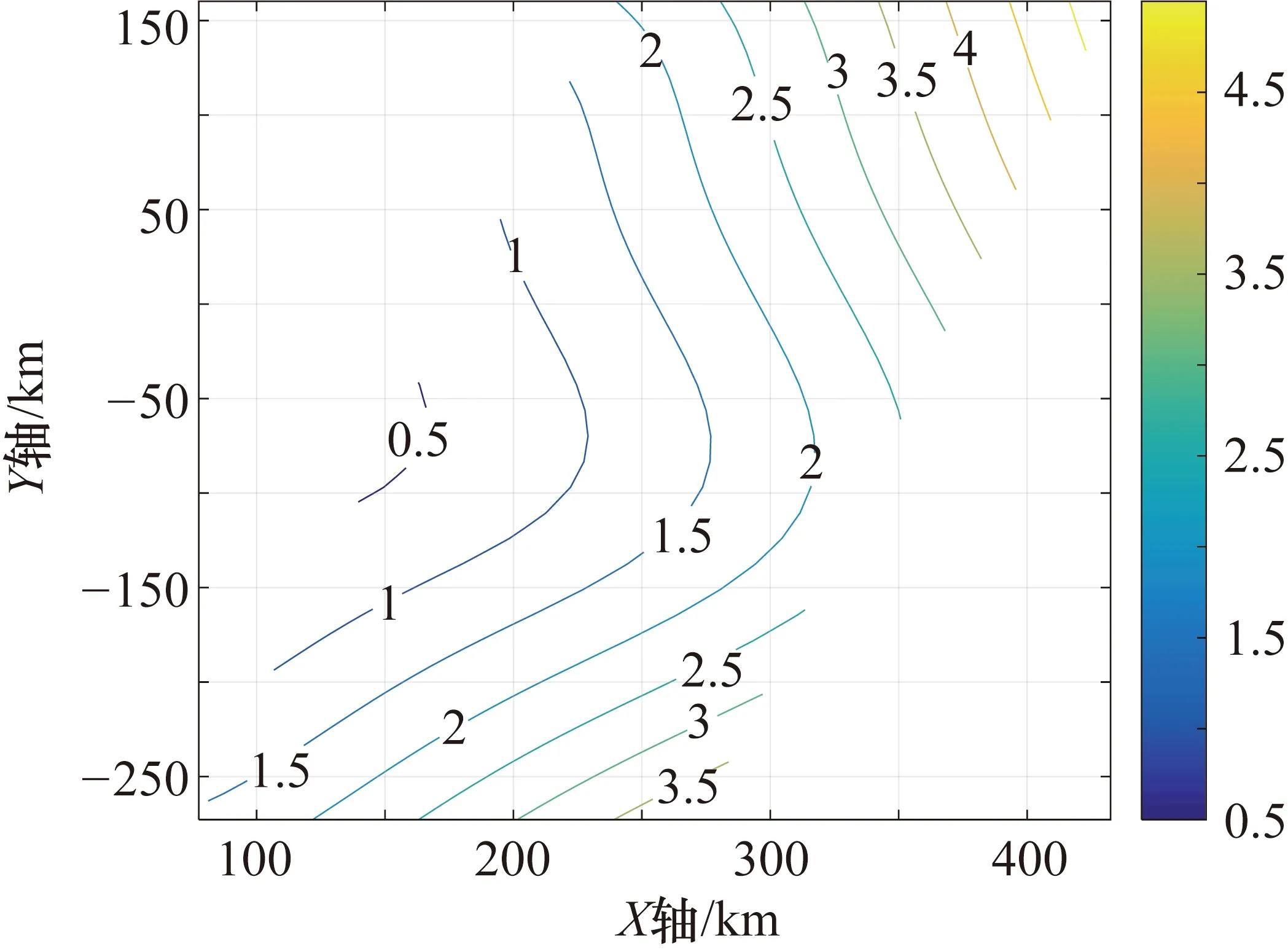
图5 目标空域等误差曲线
4 结论
无源雷达布站方案是决定雷达组网跟踪探测性能的一个关键因素。布站方案的求解本质上是根据目标空域探测需求和布站区域约束条件寻优最优解问题。
① 以目标空域的GDOP值作为目标函数评价布站方案可以有效提高无源雷达组网跟踪定位精度。以网格化后的目标空域的GDOP值的加权平均代替多重积分计算,简化了计算复杂度,且可以通过调整加权系数提高重点敏感空域的探测精度,增加了雷达布站的灵活性。
② 从4个地形数据中随机产生站址组合作为搜索样本,这种搜索策略优点在于简单直接且可以并行搜索,有利于发挥超算算力,也保证了最优解的搜索成功率;缺点是随着4个地形数据样本增加,搜索到最优解的遍历次数将会以o(n4)增加,搜索时间显著延长,且依赖于超级计算机运行搜索算法。可以通过增加约束条件(如雷达主站布设在山峰最高点)来缩小样本规模,从而缩短搜索时间。
③ 实际雷达布站中,应该考虑地形地势对无线电波的遮挡效应。这是布站算法工程化必须要考虑的因素,也是后续的研究方向。