复杂采空区群全方位一体化三维测量
2023-01-03沈向前杜年春朱洁霞
沈向前,杜年春,吴 伟,朱洁霞,廖 超
(1. 中国有色金属长沙勘察设计研究院有限公司,湖南 长沙 410117;2. 武汉大学测绘学院,湖北 武汉 430072;3. 湖南省矿山安全智能化监控技术与装备工程技术研究中心,湖南 长沙 410117)
近年来,基于无人机倾斜摄影测量和三维激光扫描的三维模型重建技术不断发展,突破了传统测量单点测量的限制,能够快速精准的获取测量对象的三维坐标信息,快速实现实景三维建模,极大提高了工作效率,在城市地下空间与矿山采空区等相关工程中得到了应用[1-9]。本文针对长沙某石灰石矿历史遗留的地下采空区群精准探测的问题,设计一种全方位一体化三维测量方案,快速建立矿坑周边地上地下全方位一体化三维模型,通过模型获得任意位置、任意角度的平剖面、立剖面,得到采空区的面积、体积、高度、跨度等空间三维参数,极大提高了采空区探测数据的可视化效果,为采空区的管理提供了技术支撑。
1 工程区域概况
长沙某石灰石矿矿坑位于坪塘大道西侧,原为石灰岩露天采矿的矿坑,矿坑顶纵向最长约为480 m,横向最长约为450 m,矿坑底纵向最长约为390 m,横向最长约为380 m。矿坑顶高程为46.76~65.71 m,矿坑底部海拔约为-63.02 m,矿坑底部现有的水域面积约为92 141 m2。矿坑的侧壁因采矿形成了规模较大的采空区群,根据现场的情况,采空区主要分布在矿坑的北侧、东北侧及西侧。为了利用土地资源,地方政府决定由开发商对此矿坑及地下采空区进行开发,建设主题公园,亟需矿坑及周边范围内的基础数据,为矿坑及采空区周边地块的改造设计提供基础资料。测区范围Google 影像图如图1 所示,该矿山地下采空区面积较大,存在多个采矿通道,内部洞室结构复杂,且采空区内诸多洞室淤积大量泥水,该区域人员、设备难以到达。由于开采的年代久远,缺乏地下采空区的历史图纸资料,给采空区探测工作增加了难度。

图1 测区范围Google影像图
2 技术方案
2.1 技术方案设计
根据矿区相关设计资料和实地探勘结果来分析,此范围面积较大,采空区内部矿道交错,且大部分区域蓄积了大量泥水,人员和设备较难到达。由于环境复杂,若使用单一的测量方式会有测量范围、角度方面的限制,无法保证设计的精度要求。综合项目区域的实际情况,为了获取石灰石矿坑及采空区群上部地块的地貌,同时快速采集石灰石矿坑的立面、体积、高度等信息,设计了地上地下全方位一体化三维测量方案,其技术实现流程图如图2所示。

图2 一体化测量技术流程图
通过无人机倾斜摄影测量技术对矿坑及周边场地进行航测,同时综合使用固定式三维激光扫描仪和钻孔三维激光扫描仪对采空区群进行三维扫描,通过对获取的航拍点云和三维点云进行一体化三维建模,得到采空区一体化三维模型,为后续矿坑及采空区周边地块的改造设计、施工造价提供准确的测绘资料。
2.2 平面控制网建立与数据采集
原石灰石矿的周围布设有高等级的固定观测点,根据测区范围选取合适的已知点,利用GPS 接收机RTK测量模式测量后进行七参数校正,使得无人机倾斜摄影测量与三维激光扫描仪的外业采集数据位于同一个坐标系统之下,方便后期的多源点云融合建模。
无人机倾斜摄影测量数据采集使用大疆精灵4无人机,在测区范围内,选择稳固、无遮挡的区域均匀布设像控点,用RTK进行测量并记录。本次航飞共测量了1.3 km2面积,共设置了43条航线,无人机的飞行高度设置为120 m,航向重叠度为80%、旁向重叠度70%。共拍摄1 992张影像,其中正射影像906张、倾斜影像1 086张,本次测量内外业检查均合格,内业处理后的航拍点云数据如图3所示。

图3 石灰石矿坑倾斜航拍点云图
在人和设备能够达到的地下采空区利用固定式三维激光扫描仪进行数据采集。根据资料分析和现场勘察后,进行测站的布设与站次的规划,根据现场情况设定扫描起始站,在起始站选择环境空旷的位置需要4 个球棱镜,通过全站仪测量球棱镜的地理坐标,方便数据处理时引入高程系与坐标系转换。
项目中对于人员能够到达的采空区,采用FARO Focus3D X330三维激光扫描获取采空区的三维空间信息,其采用相位偏移技术,具有精度高、测量速度快、测量范围广、扫描距离长等特点,测距精度为1 mm@100 m、扫描范围为360°×330°,扫描距离可达330 m。
由于矿内采空区距离长、范围广,需要多次扫描并通过点云拼接将所有扫描数据统一在一个坐标系下,共进行5 d扫描、获取106站扫描数据,在通过配套的点云处理软件SCENE对多站数据进行拼接,三维激光扫描仪初站布设与点云数据如图4所示。
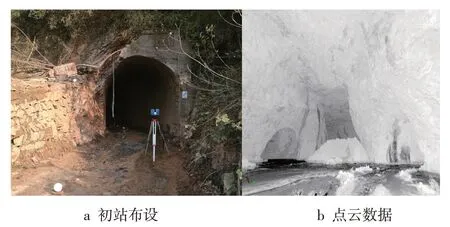
图4 三维激光扫描仪初站布设与点云数据
用固定式三维激光扫描仪完成可达区域的数据采集后,根据三维点云结果,来判断采空区的走向并确定地质钻孔的位置,再利用C-ALS钻孔扫描仪[10]来采集人员无法到达的采空区的三维点云。C-ALS是具备用50 mm钻探直径就可以深入地下进行采空区探测的三维激光扫描仪。该设备探头直径小,使用它可以沿钻孔深入到难以接近的空穴、地下空间以及空腔内。探针头部集成的摄像头可提供钻孔内部视野,供人员判断有无障碍物以及是否下放到位。C-ALS的马达驱动双周扫描探头,可以保证仪器能做球形360°扫描,以覆盖整个空区,最大扫描距离150 m,C-ALS探头整合了倾斜和转动传感器,来保证激光扫描点云定向和定位的准确性。依据上述探测方法,完成对石灰石矿采空区群的探测工作。钻孔扫描采空区点云数据展示如图5所示。

图5 钻孔扫描采空区点云数据
2.3 一体化三维建模
对于矿山采空区的探测数据的可视化,一般是通过对三维扫描的点云进行抽稀、然后使用Geomag⁃ic-Studio 等建模软件进行三维建模[11],此方法处理速度快、模型数据量小、易于传输。上述方法仅对地下采空区进行三维建模,由于缺乏地面的三维数据,难以进行对比分析,无法快速获取采空区顶板距离地面的距离、采空区表面的地貌情况等信息。为了更好地展示石灰石矿采空区的探测效果,对无人机航测倾斜摄影影像数据和三维激光扫描点云数据进行联合三维重建,建立采空区地上地下一体化三维模型。使用Context-Capture 软件进行三维重建,大致流程如下:
1)新建项目,导入无人机倾斜影像数据集,联合倾斜影像和像控点进行空三加密和密集匹配,点云模型如图6所示。
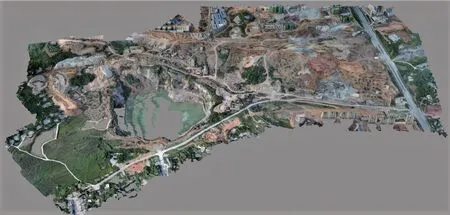
图6 倾斜摄影测量三维模型
2)导入三维点云数据,点云数据格式为.e57 或者.ptx,点云数据的坐标系与无人机倾斜摄影像控点的坐标系一致。
3)进行联合三维重建,通过密集匹配获得的倾斜点云和三维激光扫描点云融合在一起进行构建不规则三角网并进行纹理映射,生成一体化三维模型。
经过全方位一体化三维模型,极大提高了采空区探测数据的可视化效果,也更方便进行后续的分析和设计,采空区一体化三维模型效果如图7所示。

图7 采空区模型底视图
可以使用Bentley Descartes软件直接加载采空区模型,进行模型查看和分析,任意位置的剖面图展示如图8所示。

图8 采空区模型剖面图
3 数据分析
在完成石灰石矿坑周边地下采空区的探测及三维建模后,可以精准、快速地计算采空区的面积、体积、高度等空间信息。根据地下采空区的形状和走向将其分为12 个片区并分别标号,1~12 号采空区的范围用不同的颜色表示,采空区探测结果如图9 所示。使用Bentley Descartes软件可对各个采空区的表面积和体积进行测算,统计结果见表1。也可在指定的位置进行剖切,测算采空区跨度、顶板深度、底板深度等信息,如图10所示。
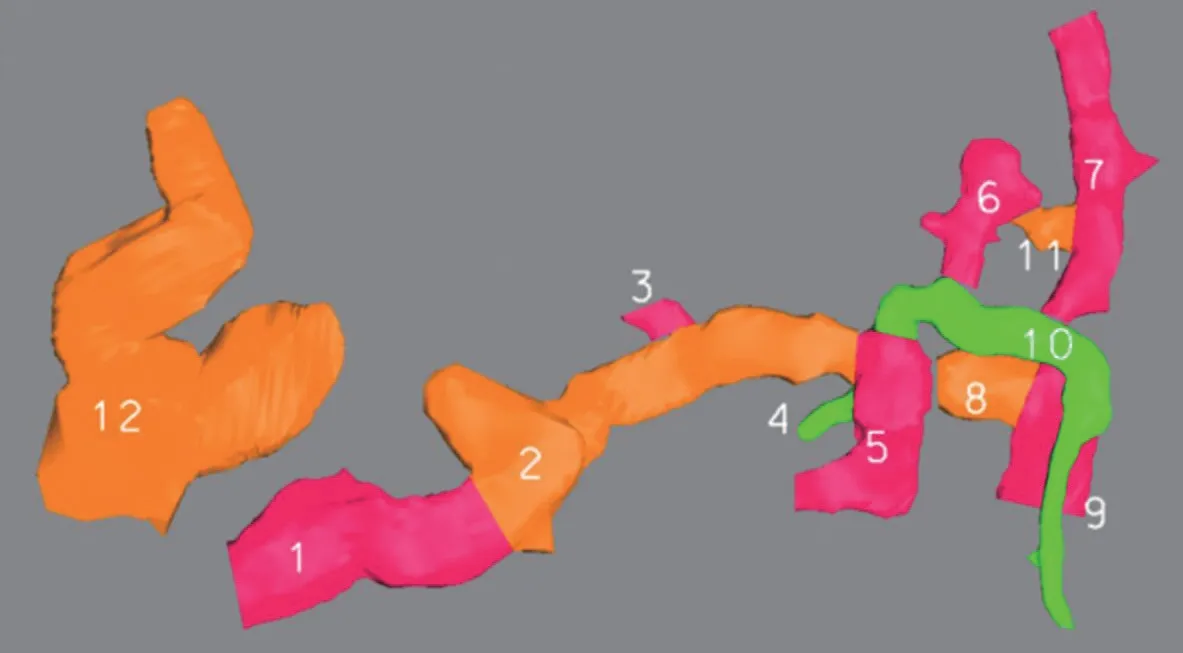
图9 采空区空间分布图
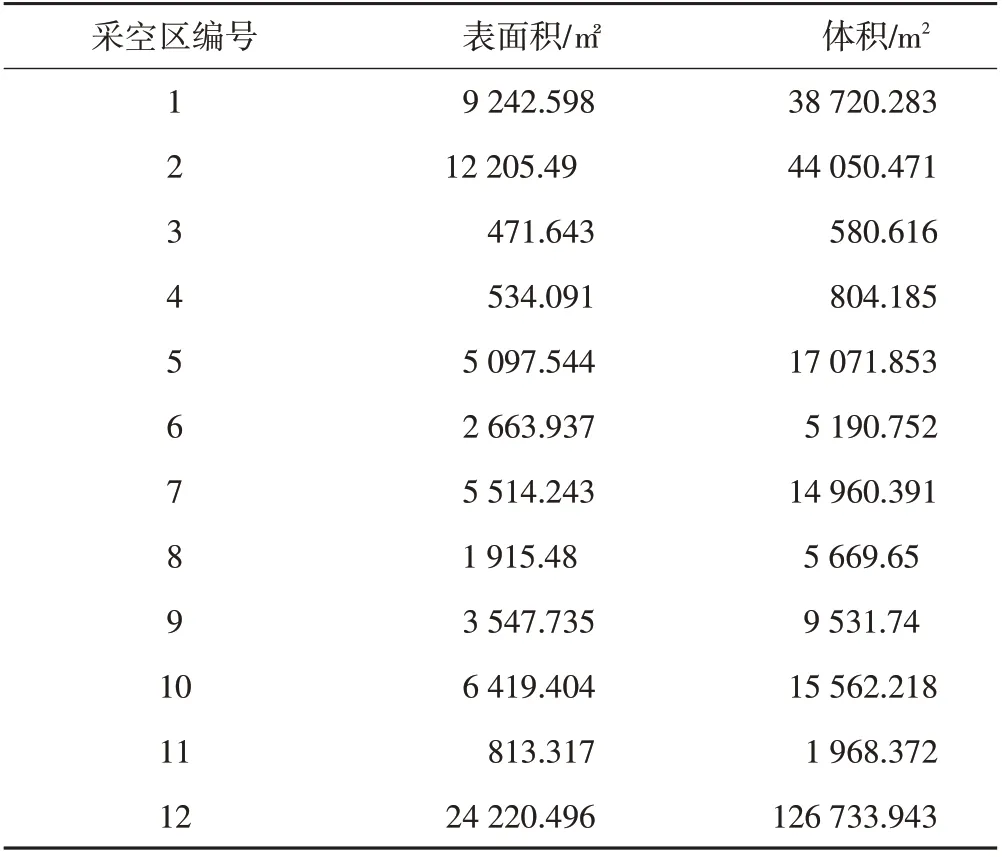
表1 采空区表面积、体积测算
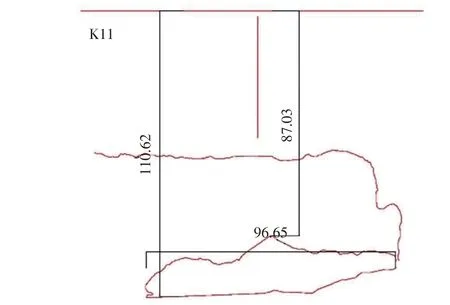
图10 采空区剖面测量
4 结 论
老旧矿山地下采空区结构复杂、部分采空区人员、设备无法安全进入,联合FARO 地面式三维激光扫描仪和C-ALS 钻孔三维激光扫描仪的采空区探测方案,能够高效探测复杂的地下空采区群,并节约钻探成本。再结合无人机摄影测量技术,设计采空区一体化三维测量方案,实现了倾斜摄影测量和三维激光扫描的优势互补,直观的展示采空区地上、地下的空间位置关系,较好解决了采空区三维模型难以分析,无法有效指导采空区后续设计、治理的问题。
本方案可用于大部分矿山采空区、地下管廊、人防工程、隧道、溶洞等地下空间的精准探测,但对于充满水体或埋深超过120 m 的地下空间,由于无法使用三维激光扫描仪作业,故不适用。后续需要结合高密度电法、地质雷达、电磁波CT 等工程物探方法开展进一步研究,完善复杂采空区的探测方案和作业方法。