伤员转运机器人机械臂运动学与动力学分析
2023-01-03王天赐郭继录李艳杰
□ 王天赐 □ 郭继录 □ 李艳杰
沈阳理工大学 机械工程学院 沈阳 110001
1 伤员转运机器人简介
伤员转运机器人的核心部件包括移动平台、腰部机构,以及双机械臂。移动平台负责移动伤员至指定位置,腰部机构搭载双机械臂,双机械臂执行抱起伤员动作以完成救援任务。可见机械臂是伤员转运机器人功能实现的核心部件,机械臂运动学与动力学研究能够解算其一系列动作过程中各个关节所需要的驱动力矩。
伤员转运机器人搭载的双臂是对称的,单臂包含六个转动关节,末端执行器类似担架结构,起承重和保护作用。机械臂完全伸展长度可达1 500 mm,质量为68 kg,可承受40 kg负载。笔者选取双机械臂中的左臂进行运动学与动力学相关研究,其三维结构简图如图1所示。

图1 机械臂三维结构简图
2 机械臂运动学分析
2.1 机械臂运动学方程
伤员转运机器人机械臂三维结构模型,采用改进D-H(Denavit-Hartenberg)法建立连杆坐标系,基坐标系建立在与双机械臂连接的腰部中心处,改进D-H法连杆坐标系如图2所示。获得的改进D-H参数表见表1。

图2 改进D-H法连杆坐标系
图2中,xi、zi分别为连杆i坐标系的X轴、Z轴,下角标为0表示基坐标系。

表1 改进D-H参数表
表1中,a0为634.36 mm,a1为196.72 mm,a2、a3、a4、a5为0,d1为329.02 mm,d2为40 mm,d3为407 mm,d5为508 mm,α0为π,α1、α2、α3、α4、α5为π/2,θ1、θ2、θ3为π/2,θ4、θ5为π。

(1)
(2)
式中:(nx,ny,nz)为法向向量;(ox,oy,oz)为方位向量;(ax,ay,az)为接近向量;(px,py,pz)为机械臂的末端执行器中心在基坐标的位置向量。
2.2 机械臂运动学仿真
运用MATLAB软件机器人工具箱来研究伤员转运机器人机械臂的运动特性,对其进行运动学仿真分析。根据表1的具体参数建立机械臂的仿真模型,如图3所示。

图3 机械臂仿真模型
得到机械臂改进D-H模型,该模型是进行机械臂运动学、动力学分析的基础。利用MATLAB软件机器人工具箱在该模型基础上计算机械臂运动学的正解与逆解,通过正逆解对机械臂各个关节进行轨迹规划,方便后续动力学分析。
3 机械臂动力学分析
3.1 动力学建模方法概述
伤员转运机器人机械臂动力学问题,其实就是研究各个关节角度、角速度、角加速度及其驱动力矩之间的关系。建立伤员转运机器人机械臂精准的动力学模型,为机械臂动力控制奠定基础,使机械臂实时力控制成为可能。
目前有很多机器人动力学建模方法,其中以拉格朗日法和牛顿-欧拉法应用最为广泛。拉格朗日法的优点是从整个系统的能量角度出发,动力学方程简洁,并且可有效避免方程中内力项的出现,计算效率高,但是在其建模过程中动能及势能的推导较为复杂,广义坐标的选取也存在一定的难度。牛顿-欧拉法的本质是基于矢量力学的系统动力学建模方法。其通过隔离系统的每个单元,利用牛顿第二定律及质心动量矩定理来推导单元质心平动方程,并根据欧拉原理来推导质心转动方程,获取整个系统每个单元的动力学方程;然后再依照各个单元间约束关系获得整个系统动力学方程。牛顿-欧拉方程的形式直观,且物理意义十分明确,推导得到的动力学方程也容易进行变换。所以笔者利用牛顿-欧拉法为伤员转运机器人建立动力学模型。
3.2 机械臂动力学建模
将伤员转运机器人机械臂各个杆件的惯性张量、连杆质量、质心矢量、关节角度、关节角速度及关节角加速度等参数代入牛顿-欧拉动力学方程,便可计算出对应的关节力矩。
各连杆质量中,m1为36.65 kg,m2为7.92 kg,m3为8.53 kg,m4为6.73 kg,m5为6.69 kg,m6为1.76 kg。
各质心矢径为:
各惯性张量为:
4 基于MATLAB的机械臂动力学仿真
对准备抱起伤员的机械臂进行五次多项式运动规划,在MATLAB软件中对机械臂的动力学模型进行仿真。根据伤员转运机器人机械臂的关节角度、关节角速度及关节角加速度等运动状态,可以通过计算得到关节驱动力矩,动力学仿真结果如图5所示。
从图4中可以看出,在准备抱起伤员过程中,机械臂运动规划速度与加速度都为连续且平滑曲线,且开始运动与结束运动速度及加速度都为零,保证了关节运动平稳。结合机械臂力矩曲线看出,由于在抱起伤员过程中关节1与关节4为主要受力点,因此,除了关节1跟关节4在运动过程中始终受力,其余关节力矩都趋向于零。这是因为从零加速至最大速度所需力矩最大,达到最大速度后所需力矩逐渐减小,最后递减为零。结合角速度和角加速度来看,关节由静止到运动、再由运动到静止的过程中,力矩变化符合客观事实,且符合受力要求,完全能够满足抱起伤员的需求。
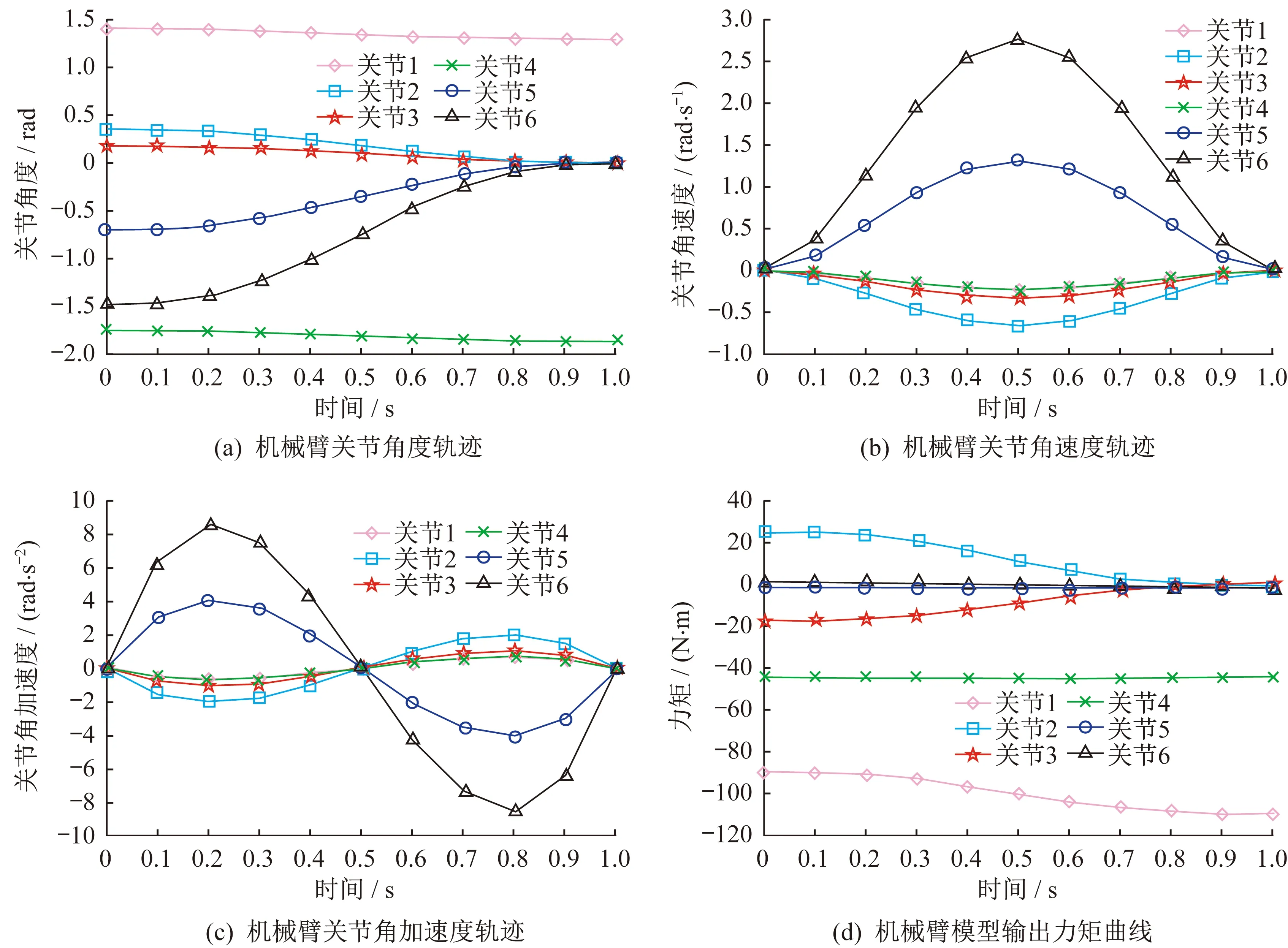
图4 动力学仿真结果
5 结束语
利用改进D-H法、牛顿-欧拉法对伤员转运机器人机械臂,进行了运动学、动力学的分析,验证了所建立的动力学方程的正确性,同时通过仿真过程输出的力矩曲线得到机械臂各关节的受力情况,为后续的真机试验提供了保障。
