电动遥控自走式登车桥的研制*
2022-12-30许甦康冯晓鹏朱建刘一潭
许甦康 冯晓鹏 朱建 刘一潭
四川省农业机械鉴定站,四川成都
运输拖拉机、联合收割机等农业机械装卸车时通常需要使用专用的装卸平台,装卸平台可以是固定的,俗称上(下)车台;也可以是移动的上下车装置,一般称为移动登车桥。固定的上(下)车台,受限于不同长度货车行驶转弯半径的需求,需要设置在货车易于到达的位置,对于场地要求较高,也会影响场地的综合利用,且其作业平台高度不可调整,对于不同货厢高度的货车适应性较差,高差较大时,还需要借助跳板进行过渡,存在安全隐患。拖拉机、联合收割机等农业机械具有行走功能,使用移动登车桥进行装卸车作业可以比较好地解决固定式上(下)车台的不足。常用的移动登车桥,包括支撑架、斜桥板和支撑轮,斜桥板倾斜设置在支撑架上,斜桥板较低位置的一端与地面接触,较高位置的一端与车厢底面对接,支撑轮设置在支撑架的下方,需要使用人力推动将其移动至指定位置进行装卸作业,但对于装卸较重货物的登车桥,其自身结构重量较重,还需借助叉车来移动设备,使用非常不便。
为解决传统登车桥移动不方便的缺点,笔者设计研制了一种采用电动平车为动力平台,集成搭载登车桥架于一体,能够升降作业高度,并具备遥控控制其行走功能的电动遥控自走式登车桥,该设备仅需单人作业,提高了工作效率,方便了农业机械装卸车作业。
1 电动遥控自走式登车桥结构与工作原理
电动遥控自走式登车桥是依托电动遥控移动平台,将桥架移动至指定地点进行装卸作业的辅助设备(如图1)。该登车桥使用专用的电动平车作为承载登车桥桥架的动力平台,由蓄电池提供动力驱动行走电机带动行走轮转动,并利用遥控装置控制平台的移动。移动时将登车桥支撑腿收回,便于桥架整体进行移动,到指定位置后放下支撑腿,将可移动平台抬起桥架至与运输车辆车厢一致的高度,通过连接板与货车车厢连接,即可进行装卸作业。该登车桥使用手动升降支腿(或液压油缸支腿)调节支撑腿高度,可根据运输车辆车厢的高低调节桥架高度。

图1 电动遥控自走式登车桥结构示意图
2 关键技术参数与部件设计
2.1 主要技术参数确定
2.1.1 承载载荷
主要用于拖拉机、联合收割机等农业机械装卸车作业,目前主流的轮式拖拉机、联合收割机产品自重通常不超过10 t,故确定登车桥承载载荷为10 t。
2.1.2 桥架宽度
汽车、挂车的货厢宽度一般为2.3~2.4 m,结合GB 1589-2016《汽车、挂车及汽车列车外廓尺寸、轴荷及质量限值》关于汽车、挂车的宽度要求,确定桥架的宽度为2.4 m。
2.1.3 作业升降高度
运输车辆或挂车的货厢离地高度一般为1.1~1.5 m,因此,确定设备为可升降式结构,满足1.1~1.5 m 升降作业高度要求。
2.1.4 桥架长度
根据拖拉机、联合收割机的爬坡角度,确定设备在升至最高高度时其坡度应不大于25%。根据设备的最高设计作业高度1.5 m,确定桥架长度为6.5 m,此时,桥架平面与地面的坡度为23.7%。
2.1.5 电动遥控移动平台的承载能力、速度、续航时间
按照前述设计参数要求,选择电动平车作为可升降桥架的载体,结合桥架重量,确定电动平车的承载能力为3 t,直线行走速度5~20 m/min,具备万向转向,蓄电池满电作业时间为2 h,带有手持遥控装置控制平台的转向、行走。
2.2 关键部件结构参数
电动遥控自走式登车桥结构及主要技术参数如表1所示。
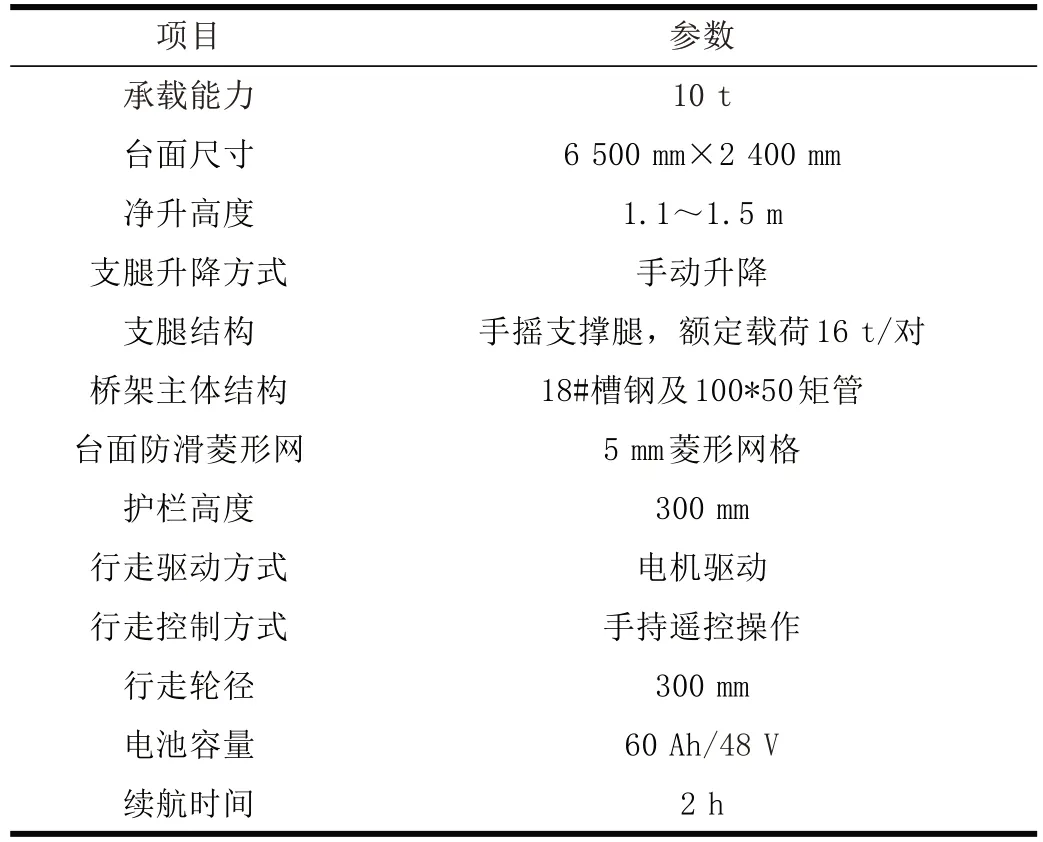
表1 电动遥控自走式登车桥结构及主要技术参数
3 电动遥控自走式登车桥的试验验证
电动遥控自走式登车桥制造装配完成后进行了装卸车作业试验验证。试验分别选择了200马力(147.06 kW)的四轮驱动轮式拖拉机和200马力(147.06 kW)的两轮驱动轮式拖拉机,样机外廓尺寸为5 250 mm×2 250 mm×3 150 mm,轴距长2 750 mm,轮距为前轮1 850 mm/后轮2 000 mm,最小使用质量6 470 kg;运输车辆货箱长度5.80 m、宽度2.30 m,货箱底板高度1.25 m。电动遥控自走式登车桥与运输车辆货箱后门对接后,两轮驱动与四轮驱动轮式拖拉机均可安全、顺利装卸作业。
4 结论
本文设计了一种电动遥控自走式登车桥(见图2),配置以蓄电池、驱动电机为行走动力的移动平台,并具备遥控控制其行走功能,可便捷移动至指定地点进行装卸作业。采用遥控方式控制操作移动平台的行走移动,方便操作,安全高效,并能够实现作业高度升降调节,解决了传统登车桥不便移动的不足。该设备仅需单人遥控作业,安全便捷,工作高效,具有较好的推广应用前景。

图2 电动遥控自走式登车桥
