基于相似性原理的CAN信号解析
2022-12-29樊金娜马欢欢刘娇杨
樊金娜,马欢欢,刘娇杨
基于相似性原理的CAN信号解析
樊金娜,马欢欢,刘娇杨
(中国汽车技术研究中心有限公司,天津 300300)
随着新能源汽车研发的不断深入,在车辆对标测试中,通过采集控制器局域网络(CAN)总线信号来获取实验分析数据成为一种重要手段。CAN总线协议对于车辆制造厂是一项保密文件,因此,研究一种逆向解析车辆的CAN总线信号的方法是必要的。基于相似性原理的CAN信号解析方法研究,是通过某些信号在特定工况下所表现的典型特征,进而覆盖到不同车辆共有特征,利用数学算法实现信号在总线报文中定位。这种方法节省了人工处理大量CAN总线数据的时间,比较快速有效地过滤出信号所在的ID,实现对车辆的CAN总线信号的解析。文章针对车辆CAN总线信号逆向解析,提出通过相似性原理,经过系统数学算法筛选,快速定位所需信号在总线报文中的位置。研究结果表明,该方法适用于车辆对标测试中大部分CAN信号,从而提高CAN信号解析的准确性和工作效率。
控制器局域网络总线;信号逆向解析;相似性原理;数学算法
随着数字化、信息化产业的发展,传统的汽车行业也被赋予了新四化的主题。通过新能源车辆的对标测试,可以有效地助力新产品研发。传统车辆对标测试中几乎都是通过外加传感器来获取车辆的数据。随着车辆信息量的增大,传感器已经不能满足数据分析,控制器局域网络(Controller Area Network, CAN)通讯协议的实时性和可靠性,成为获取车辆信息的重要来源。
在CAN总线信号的逆向解析领域,现有的一些理论和方法,如张永生等[1]提出电动汽车CAN总线多渠道解析方法,阐述了CAN信号基本信息的解析,总结了关联度较高的几类信号的解析方法;樊金娜等[2]在车辆CAN总线信号逆向解析方法研究中对信号的定位有一定的描述,该描述主要针对静态信号及规律性非常强的动态信号,而且主要依据监测软件对变化的报文有高亮显示或者大量的人工进行筛选;关静等[3]在基于信号相似度原理的CAN信号解析方法中提出了通过相似性曲线及算法对CAN报文进行区域性的有效识别,其相似性范围仅在诊断信号和通讯信号之间,有一定的局限性。本文对信号相似性的研究,是基于多种车辆、工况及数据类型开展的,将信号典型的、共性的特征进行分析,通过有效的数学算法,实现有效的CAN总线信号逆向解析。
1 多类型数据相似性CAN信号解析
1.1 基于不同车辆相似性数据的CAN信号解析
前面提到,很多新能源车辆的诊断CAN协议是无法获取的,那么就无法通过容易获取的诊断信号来直接推断通讯CAN信号。多次试验数据证明,不同车辆在相同工况下,一些信号会有相似的表现趋势,而只需用一辆已知CAN信号车辆,固化一个代表性的工况,将其各参数进行采集,形成模板曲线,就可以在不同的车辆之间灵活地应用“相似性”。常用的静态信号如制动踏板开度、加速踏板开度、PRNDS挡位信息、方向盘转角、转速等。常用的动态信号如驱动电机扭矩、转速、电压、电流、车速、轮速、电池包电压、电流等。
首先将模板车型定义为A,待解析车型定义为B。算法系统是自主设计开发的相似性比对工具,本文第2部分将对其详细阐述。
1.1.1静态工况
举例1,定义一个测试加速踏板信号的工况如表1所示。
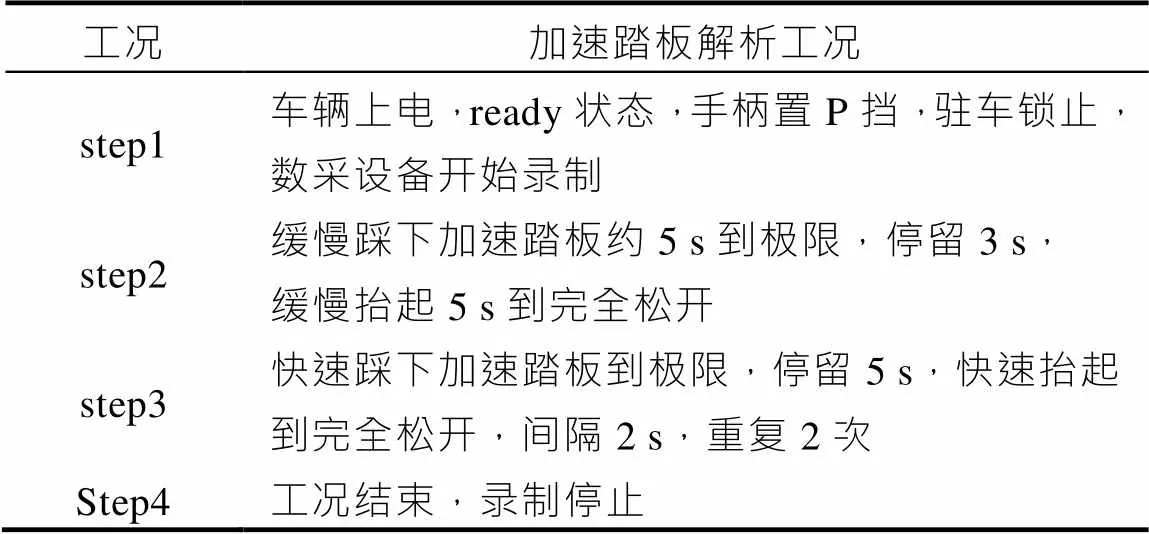
表1 加速踏板解析工况定义
据此工况通过A定义的加速踏板开度模板信号如图1所示。
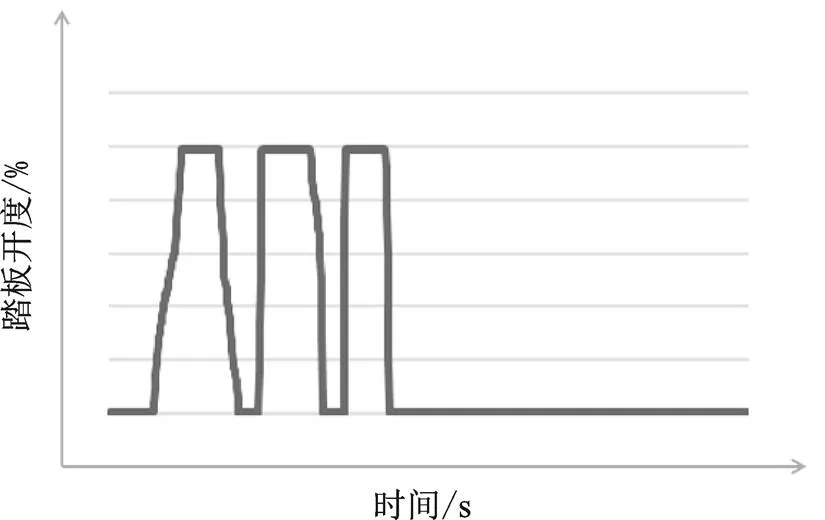
图1 加速踏板开度模板信号曲线
那么B经过同样的工况采集的报文,经过算法系统比对,可得到与A相似度非常高的曲线如图2所示。
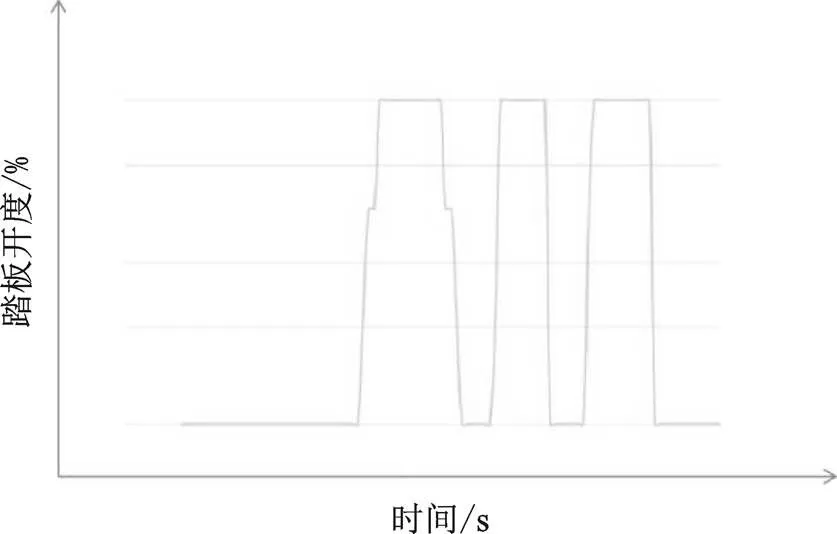
图2 系统提取的加速踏板开度相似曲线
举例2,方向盘转角信号,定义工况如表2所示。
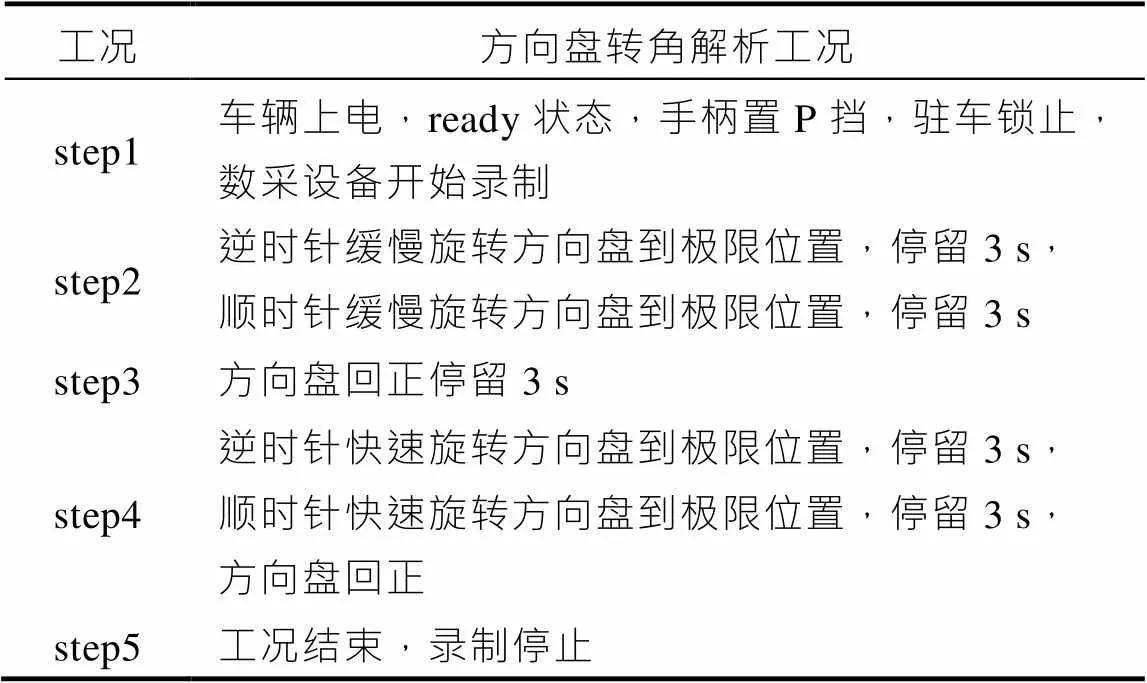
表2 方向盘转角解析工况定义
如图3所示,即可在系统里显示模板曲线A与相似曲线B,系统可同时输出相似性曲线的ID。

图3 方向盘转角相似性曲线
1.1.2动态工况
定义一个动态的加减速工况如表3所示。

表3 加减速工况定义
此工况下模板A车速与B车速的相似性关系如图4所示。

图4 车速的相似性曲线
同样此工况下模板A电机扭矩和B电机扭矩的相似性关系如图5所示。

图5 电机扭矩的相似性曲线
1.1.3基于不同车辆相似性数据的CAN信号解析的特征
(1)仅对相同工况下的图形结构进行相似性比对,对数据采集时间(或数据数量)和数据的最大最小值并无绝对的限制;
(2)因为是不同车辆间信号的相似对比,因此,并不需要曲线重合,筛选的原则是有相似的趋势;
(3)系统解析出的相似曲线重在ID和bit范围,支撑其的信号数据长度和起始位并不一定真实,是包含或邻近的。还需要人为完善信号的其他信息。
1.2 基于同一车辆已知信号计算未知信号的相似性CAN信号解析
车辆中的部分信号,是可以通过其他信号计算得来的,从而实现在同一工况下,用已知信号数据计算所需的数据曲线,再利用相似性算法解析到总线上对应的信号。
例如解析了车速,那么通过车速对时间微分,得到加速度数据及曲线,如图6所示。

图6 车速与加速度
将计算的加速度作为模板,输入算法系统中,与其原始报文进行比对,得到图7的相似性曲线及信号ID,从而解析出纵向加速度信号。
此方法的特征:
(1)因为是相同车辆相同工况数据,因此,可以得到时间轴重合度很高的曲线;
(2)根据计算的物理值,较容易的计算出信号比例系数和偏移量;
(3)因为计算的信号频率及精度与总线上原始信号有差异,因此模板曲线出现一些突出的点。
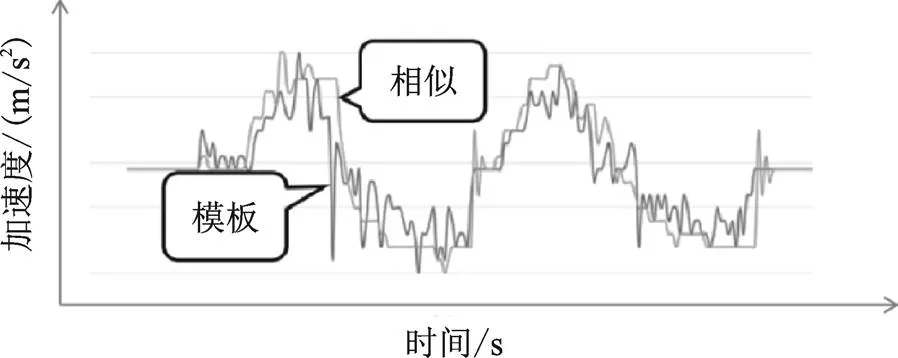
图7 加速度相似性曲线
1.3 基于传感器测量的相似性CAN信号解析
新能源车辆中有一些规律性不强信号,例如DCDC的输入电压、电流,及一些低压供电的信号。此时可以采用外接传感器对其进行数据采集,同步采集CAN总线数据进行相似性比对,试验中常采用电流、电压传感器通过德维创数采设备进行。
此方法的特征:
(1)外接传感器的采集频率和精度与总线信号差异较大,因此,对所需信号尽量做到几个较稳定的运行状态和较长时间的采集;
(2)部分国产新能源车辆低压供电信号不发CAN总线,此方法使用时候要提前对车辆的CAN总线拓扑有一定的了解。
2 相似性算法系统简介
上述关于CAN信号相似性曲线比对中,提到了算法系统。该系统基于CAN信号实际逆向解析经验,自主开发的软件系统,其主要由智能算法和操作界面两个部分组成。
2.1 智能算法介绍
2.1.1识别编码格式
通过对报文字节进行分割,按Intel和Motorola两种格式进行组成片段,根据变化频次多少,可判断报文的格式。工程师也可以人为预先判断报文格式,输入系统,算法即可省略此判断。
2.1.2静态信号过滤
对于在某一工况下完全没有变化的报文或字节,提前滤除,以缩短计算时间。
2.1.3信号切分
将信号按编码格式和目标长度进行分割,每一个分割单元都会独立参与运算。
2.1.4识别有无符号
首选无符号数据进行数据统计,当统计中出现不平稳过度的情况,使用有符号进行二次统计。
2.1.5动态时间规整
时间节点错位可能导致两个物理意义相同的信号相似度降低,为了解决时间点错位,该法引入了动态时间规整算法来对齐两个信号。
2.1.6皮尔逊相似性判断
算法通过皮尔逊相关系数来度量两个变量之间的相关程度。在模板数值和备选数据的协方差和标准差的比值如下:

式中,为的均值;为的均值;为的标准差;为的标准差。
根据比值(−1,1)来排列相似度的顺序。
2.2 系统操作界面
操作界面是根据实际使用的灵活性和方便性进行设计。主要由任务界面、工况信号编辑界面、模板维护界面和数据文件查询界面组成,如图8所示。

图8 操作系统界面
为适应不同的车型和信号,系统可以制作多个模板,重点是将模板中信号的编号与任务中信号的编号一致。
该系统的主要特点是,在算法运行前,可根据录制的车辆的CAN报文,通过初步分析,选所解析信号所在的通道(CAN1或者CAN2)、数据的格式(Intel或者Motorola)、解析模板和计算后系统推荐的相似性结果数量(5个或者10个)等。这些设置可以缩短系统计算的时间,也会使信号定位得更具体和准确。算法运行时,可以选择单一信号运行,也可多个信号同时运行,在条件不满足或设置选项有矛盾,系统也会进行提示,可及时进行调整,重新运行。算法运行结束后,工程师还可以对信号相似性结果进行人为校准,通过调整其长度和起始位,使其更接近模板曲线,从而更直接判断信号破解的准确性。
2.3 解析流程
利用相似性算法系统解析CAN信号的流程如图9所示。
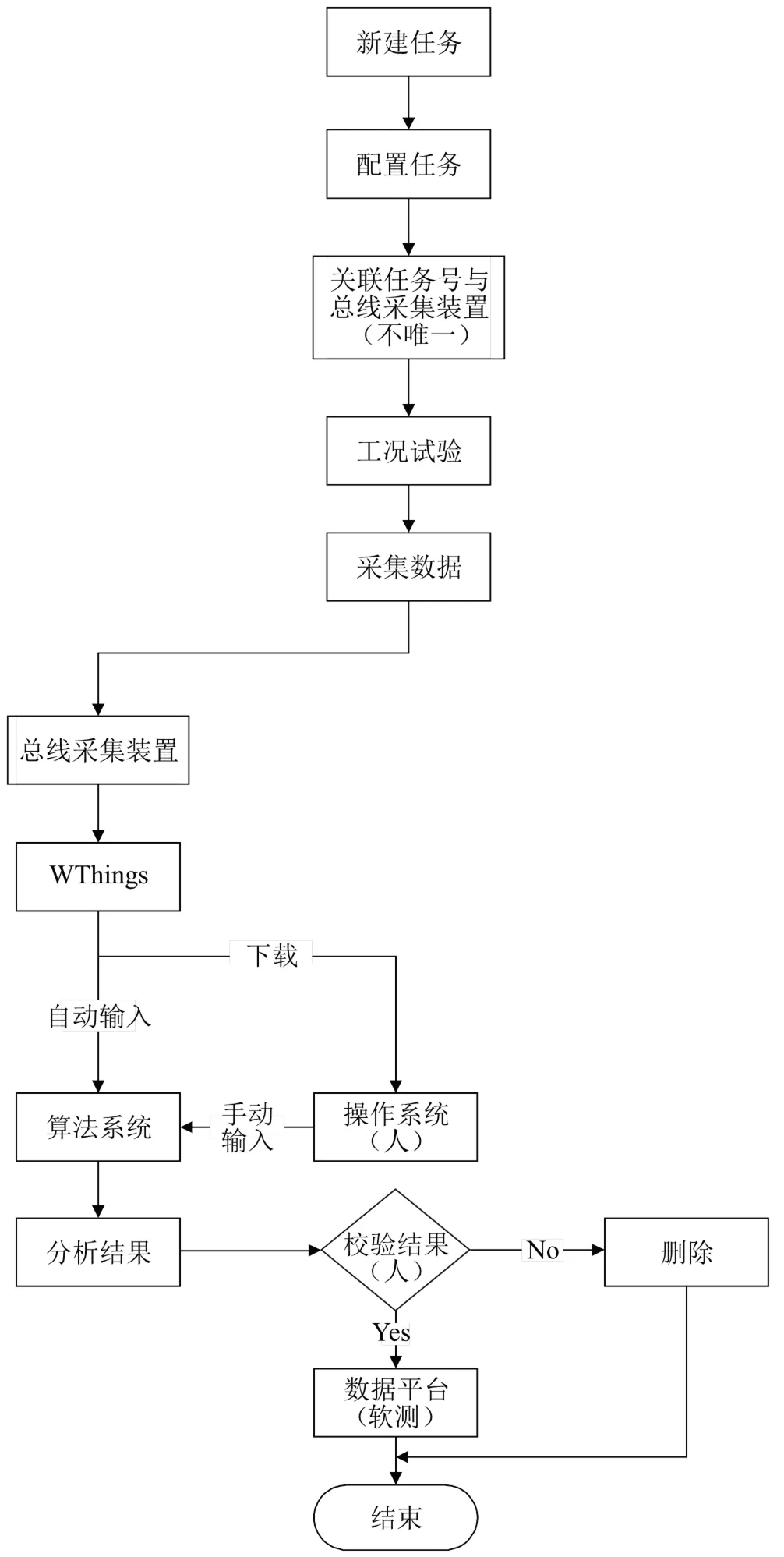
图9 CAN信号解析流程图
3 结论
本文从车辆CAN总线信号的逆向解析出发,提出系统化的解析方法,结合相似性原理的解析算法,能够为多类型数据的总线信号解析提供依据,本文研究得到以下结论:
(1)由于车辆诊断CAN协议无法获取,可以选取相似车型制作工况模板。不同车辆在相同工况下,部分总线信号会有相似的表现趋势,选用已知CAN信号的车辆形成一类标准化工况,采集实车数据后形成模板曲线,通过智能化算法计算信号的相似性得分,从而实现车辆CAN总线信号的逆向解析,具有较好的应用价值。
(2)由于部分信号是通过其他信号计算得到,因此,具有高度相似性。本文提出基于已解析的信号,依据相似性原理,在高度重合的时间轴下,解析共性较为明显的总线信号,再根据信号间的表现差异进一步区分。
(3)新能源车辆中有部分信号规律性不强,可加装外接传感器进行数据采集,同步采集CAN总线数据进行信号相似性比对,能够适用于多种新能源汽车的总线信号解析,对不同车辆中控制策略差异较大的信号具有重要参考意义。
[1] 张永生,关静,杨欣茹.电动汽车CAN总线多渠道解析方法[J].汽车工程学报,2017,7(5):368-373.
[2] 樊金娜,王垚,马欢欢.车辆CAN总线信号逆向解析方法研究[C]//2020中国汽车工程学会年会论文集.北京:中国汽车工程学会,2020:6.
[3] 关静,杨欣茹,周亚棱.基于信号相似度原理的CAN信号解析方法[J].汽车工程学报,2020,10(1):13-18.
Analysis of CAN Signal Based on Similarity Principle
FAN Jinna, MA Huanhuan, LIU Jiaoyang
( China Automotive Technology and Research Center Company Limited, Tianjin 300300, China )
With the development of new energy vehicles, it has become an important means to acquire experimental analysis data by collecting controller area network(CAN) bus signal in vehicle benchmarking test. CAN bus protocol is a confidential document for the vehicle manufacturer, so it is necessary to research a method to reverse crack the CAN bus signal of the vehicle. The research on CAN signal analysis method based on similarity principle is to use mathematical algorithm to realize signal positioning in the bus report by covering the typical features of some signals under specific conditions and then covering the common features of different vehicles. This method saves the time of manual processing a large number of CAN bus data, filters out the ID of the signal quickly and effectively, and realizes the cracking of the CAN bus signal of the vehicle.Aiming at the reverse cracking of vehicle can bus signal, this paper proposes to quickly locate the position of the required signal in the bus message through the similarity principle and algorithm screening, so as to reverse analyze the required signal. The results show that this method can quickly crack most can signals in vehicle benchmarking, and improve the accuracy and efficiency of analysis.
Controller area network bus;Reverse cracking of signals;Similarity principle; Mathematical algorithm
U469.7; U495
A
1671-7988(2022)23-29-05
U469.7;U495
A
1671-7988(2022)23-29-05
10.16638/j.cnki.1671-7988.2022.023.006
樊金娜(1985—),女,高级工程师,研究方向为车载网络,E-mail:fanjinna@catarc.ac.cn。
