汽车行驶工况特征参数优化研究*
2022-12-28唐香蕉满兴家阙雨晨
唐香蕉, 满兴家, 阙雨晨, 詹 森
(1.上海通用五菱汽车股份有限公司, 广西 柳州 545007;2.重庆交通大学, 重庆 400074)
1 引言
影响汽车燃油经济性的因素不仅包括汽车的类型结构和控制策略,而且还有行驶工况[1],通过对不同的行驶工况进行识别,然后再调整汽车的控制策略可以提高汽车的燃油经济性。而合理优化行驶工况特征参数个数,不仅能够减少工况识别过程的运算量,还能够提高工况识别的效率,因此行驶工况特征参数优化具有理论意义和实用价值。
目前一般采用两种方法优化行驶工况的特征参数,一是分析特征参数对燃油经济性等车辆性能的影响,二是分析特征参数表征行驶工况特征的能力[2-5]。周楠等[6]运用正交实验法分析10种行驶工况特征参数对油耗的影响,得到影响汽车燃油经济性的代表性特征参数有:平均速度、平均减速度、平均加速度和怠速时间比等。Ericsson E等[7]通过对特征参数与汽车燃油经济性和油耗进行回归分析,将62种特征参数优化减少到8种。Chan-Chao Lin等[8]以平均驱动功率、驱动功率标准差、平均制动功率和停车时间作为混合动力汽车道路工况特征参数,用统计数据分析了这4个参数之间的相关性,最后选择平均驱动功率和驱动功率标准差作为代表性特征参数。Xi Huang等[9]通过分析多种特征参数在不同道路工况类型下的差异程度,得出平均速度、最大加速度、最小加速度和停车时间比例为代表性特征参数。然而仅考虑特征参数对燃油经济性等车辆性能的影响或表征行驶工况特征的能力,不能够得到最优的代表性特征参数,且现有的研究没有考虑到特征参数变化程度和变化速度对工况识别的影响,因此本文提出综合考虑各特征参数之间的相关性、各特征参数同油耗的相关性以及各参数的变化速率和变化程度的行驶工况特征参数优化方法。研究结果表明该方法所获得的代表性特征参数能够很好地对行驶工况进行识别,同时减少运算量,提高工况识别效率和识别速度。
2 工况数据采集、预处理和工况段定义
2.1 工况数据采集
1) 工况数据采集设备:搭载美国ATI公司开发的ATI vision network hub工具箱的试验车,试验用车的部分基本参数如表1所示。
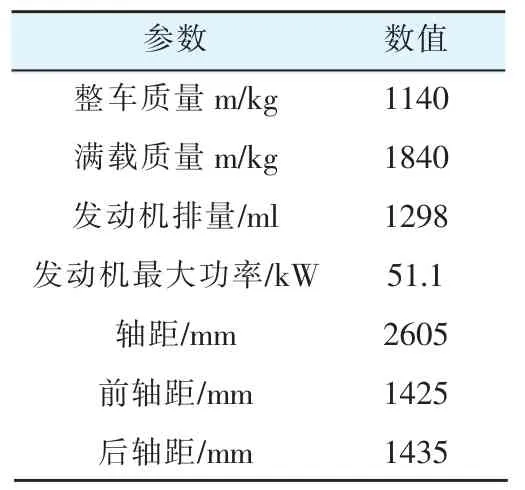
表1 实验用车的部分基本参数
2) 工况数据采集方案:驾驶实验车在高速公路、市郊、居民生活区、城市中心繁华地带的某路段反复行驶以采集基础实验数据。采样数据共30组,采样周期为0.1s,实验时间包括上下班高峰、双休日、同一天不同时段,以保证有足够的样本容量和测试数据的可靠性。
通过实验车在选定的路段进行30组数据采集,数据时长共约18h,最终整理得到所需行驶工况数据。
2.2 工况数据预处理
在试验车采集到的数据中,由于驾驶员不可避免的不当操作,汽车会产生脉冲噪声和高频噪声,这两种噪声会影响到最终的实验结果,需要运用滤波器消除这两种噪声,降噪前后的数据如图1所示。
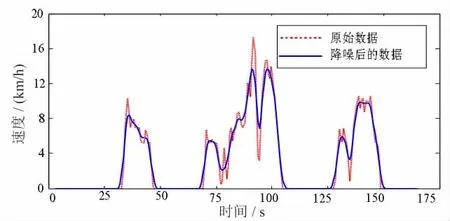
图1 降噪前后的数据对比图
具体方法是采用脉冲噪声滤波器去除工况曲线的奇点,再通过高频噪声滤波器使工况曲线平滑。脉冲噪声滤波器由公式(1)定义:
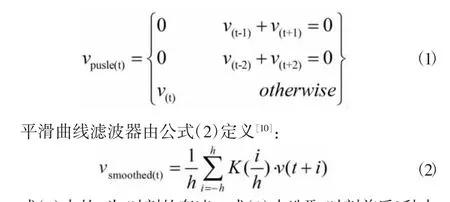
式(1)中的vt为t时刻的车速;式(2)中选取t时刻前后h秒内的车速分配权值再取平均值得到平滑后的车速,K(x)为在t时刻前后车速的权值,本文h取值为4s,K(x)的计算公式为[10]:
2.3 工况段定义
车辆在行驶过程中从某时刻开始,经过t秒后,到达下一时刻,两个时刻之间的运动过程作为一个数据单元,这种运动学片段称之为工况段。当识别周期大于150s时,识别精度趋于稳定[9],所以本文将t取150。以图2为例,一段行驶工况可划分为4个工况段。

图2 工况段的划分
3 相关系数、变化程度系数、变化速率系数定义
相关系数是用以反映变量之间相关关系密切程度的统计指标,相关系数r由公式(4)定义[11]:
式中:xi,yi——样本容量为n的两个样本数据的第i个样本;x,y——两个样本数据的平均值。
通常情况下通过以下取值范围判断变量的相关程度:相关系数在0.8~1.0为极强相关;相关系数在0.6~0.8为强相关;相关系数在0.4~0.6为中等强度相关;相关系数在0.2~0.4为弱相关;相关系数在0~0.2为极弱相关或不相关。
变化程度系数用于反映某变量在样本之间的差异程度。变化速率系数用于反映一段时间内,某变量数值上变化的快慢。变化程度系数由公式(5)定义,变化速率系数由公式(6)定义:
式中:xt——样本容量为n的数据库中,第t个样本的值;f0.98,f0.02——某变量累积分布函数值分别在0.98和0.02时的变量值。本文选取f0.98和f0.02是为了消除样本中某些奇点对试验结果的影响,提高试验的准确性。
累积分布函数是概率密度函数的积分,用以完整描述一个实随机变量的概率分布。累积分布函数由公式(7)定义:

式中:X——某随机变量;P(X<=x)——随机变量X小于或者等于某个数值x的概率。
4 特征参数优化
4.1 特征参数选取
工况特征参数的作用是用来进行工况识别,目前工况特征参数约有62种,本文将工况数据按照150s的间隔划分为工况段,从划分的工况段中提取14种常用的工况特征参数:平均速度vmean、最大车速vmax、平均加速度amean、平均正加速度ameana、平均负加速度ameand、怠速时间比ridel、巡航时间比rdrive、最大加速度amax、最小加速度amin、行驶距离s、速度方差vvar、加速度方差avar、速度平方和vspa、加速度平方和aspa。
4.2 特征参数的初步分析
提取后的特征参数数据的频率直方图如图3所示,特征参数与传统汽车燃油消耗量的关系如图4所示。由于篇幅有限本文仅列举平均速度vmean、巡航时间比rdrive、最大车速vmax、平均正加速度ameana的频率直方图和燃油消耗量关系图。
从图3中可以发现,每个特征参数都有各自的频率分布特点,从图4中可以看出,每个特征参数与燃油消耗量的关系存在一定的差异。
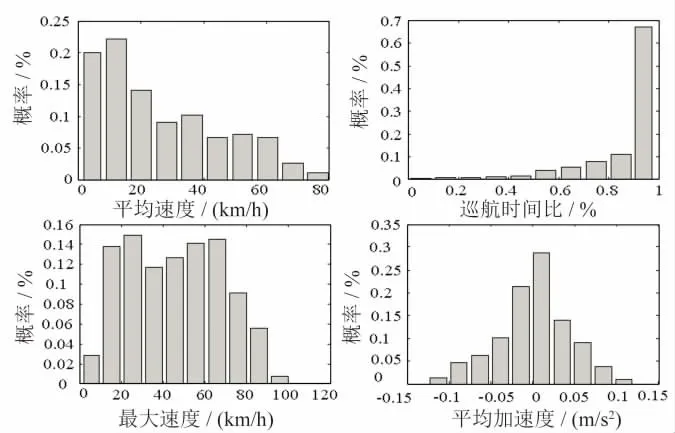
图3 特征参数的频率直方图
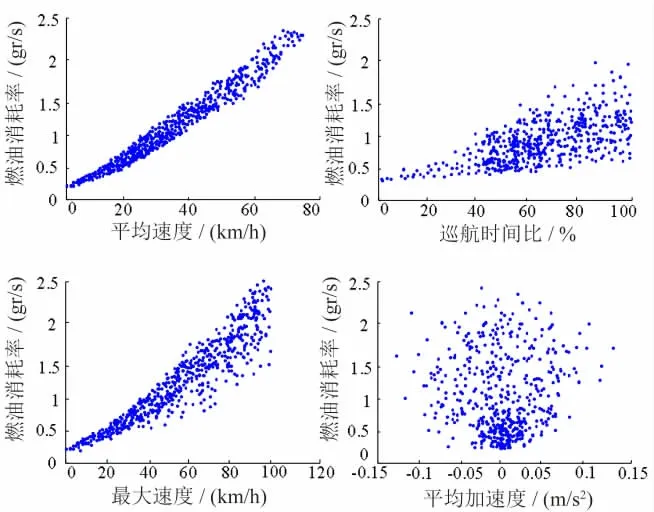
图4 特征参数与燃油消耗量的关系图
4.3 特征参数优化
目前特征参数优化的传统方法有两种,一是分析特征参数对燃油经济性等车辆性能的影响,二是分析特征参数表征行驶工况特征的能力。本文提出的方法是:通过分析各特征参数之间的相关性和特征参数分别同传统汽车、混合动力汽车油耗之间的相关性,将两种传统方法相结合,并在此基础上根据特征参数各样本之间差异越大,相邻样本之间变化越明显,越能够更好地进行工况识别的原则,增加对特征参数变化程度和变化速率的分析,最后分析得到优化后的代表性特征参数。具体步骤如下。
1) 通过各特征参数之间的相关性来分析各特征参数表征行驶工况的能力,认为相关系数在0.8以上的特征参数可以相互替代。
2) 分析特征参数分别同传统汽车和混合动力汽车油耗之间的相关性,判定特征参数对燃油经济性的影响,相关系数在0.2以上才认定该特征参数与汽车燃油经济性相关。
3) 应用变化程度和变化速率公式得到各特征参数的变化程度系数和变化速率系数,两系数在0.2以上,被认为符合要求。
各特征参数之间的相关系数如表2所示,各个特征参数同传统汽车和混合动力汽车油耗的相关系数如表3所示,各参数的变化程度系数R1和变化速率系数R2如表4所示。混合动力汽车的油耗数据是通过应用MATLAB/Simulink搭建整车模型仿真获取的。所仿真的混合动力汽车整车结构如图5所示。主要零部件包括发动机、ISG(Integrated Starter/Generator) 电机、湿式多片离合器C1、CVT变速器、差速器、电池组等。动力系统参数如表5所示。
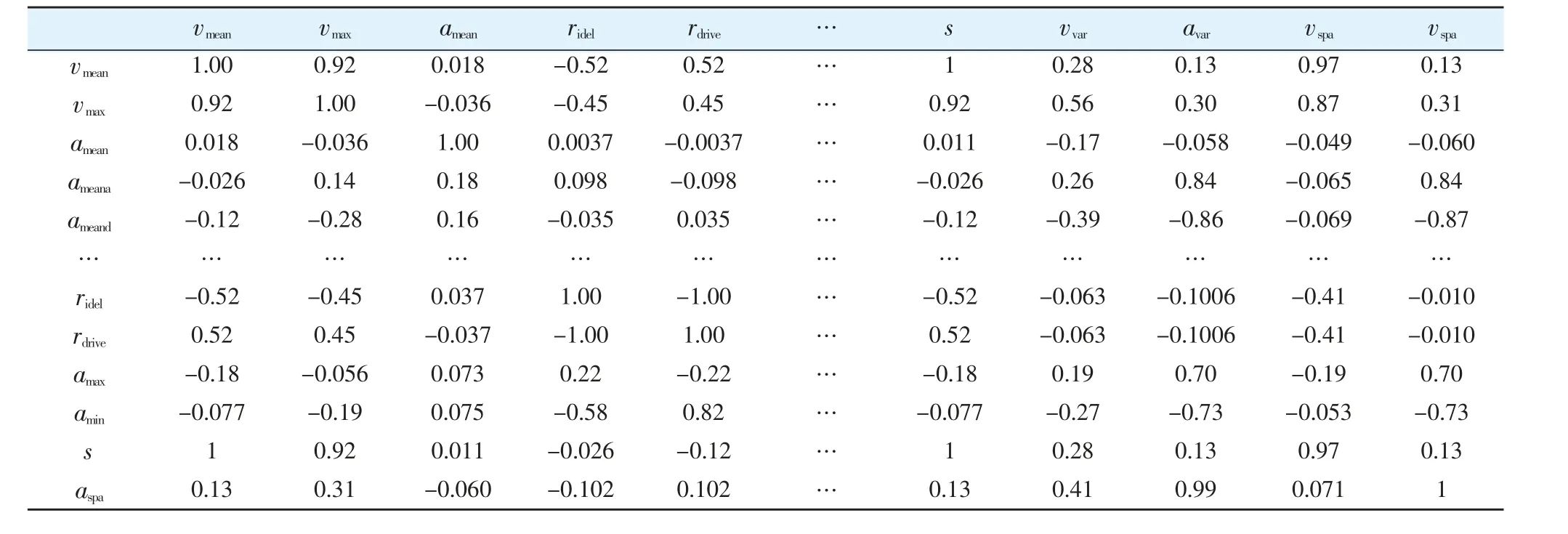
表2 各特征参数之间相关系数

表3 各特征参数与油耗之间的相关系数

表4 各特征参数变化程度系数和变化速率系数表

图5 整车动力系统结构
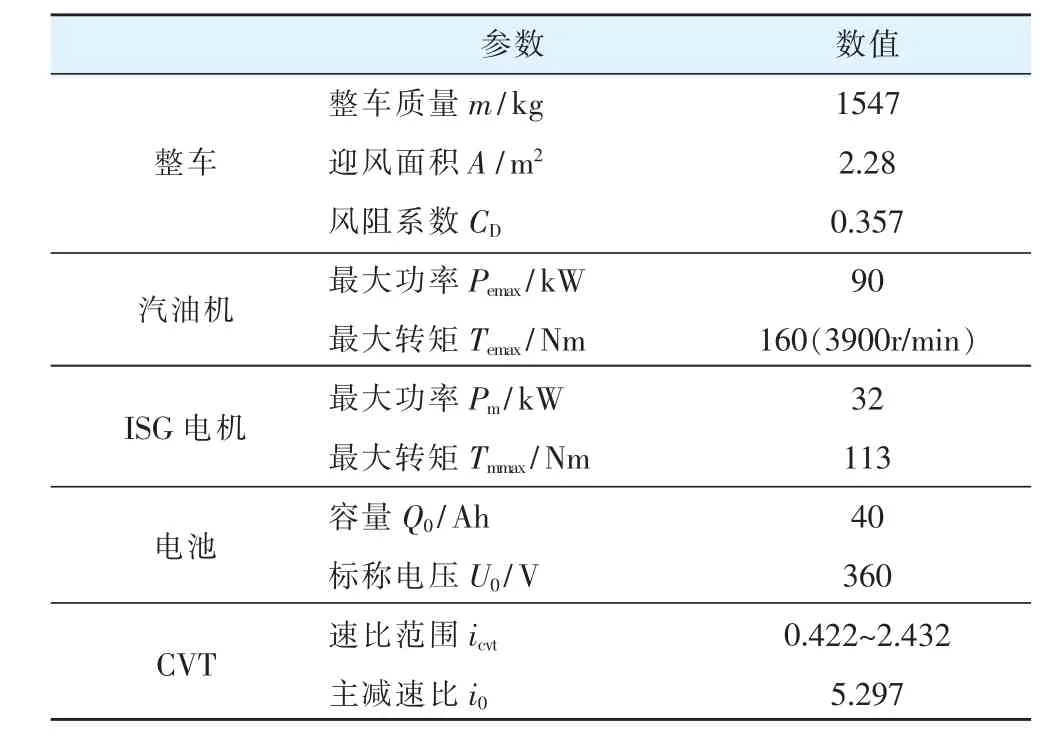
表5 该混合动力汽车动力系统参数
通过以上3步优化,最终选取平均速度vmean和巡航时间比rdrive作为代表性特征参数。平均速度vmean和巡航时间比rdrive的定义为:
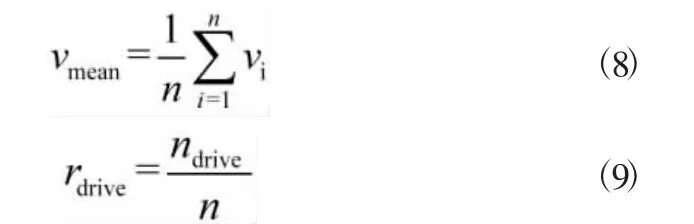
式中:n——某工况段的总时间长度;vi——在某工况块内i时刻的车速;ndrive——某工况块内速度不为0的时间长度。
5 行驶工况识别
5.1 BP神经网络
本文采用BP神经网络对汽车行驶工况进行识别,其原理如图6所示。
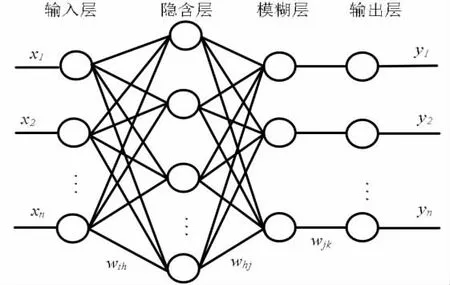
图6 BP神经网络原理图
第1层是输入层,每个神经元作为一个输入xi;第2层是隐含层,如公式(10)所示。
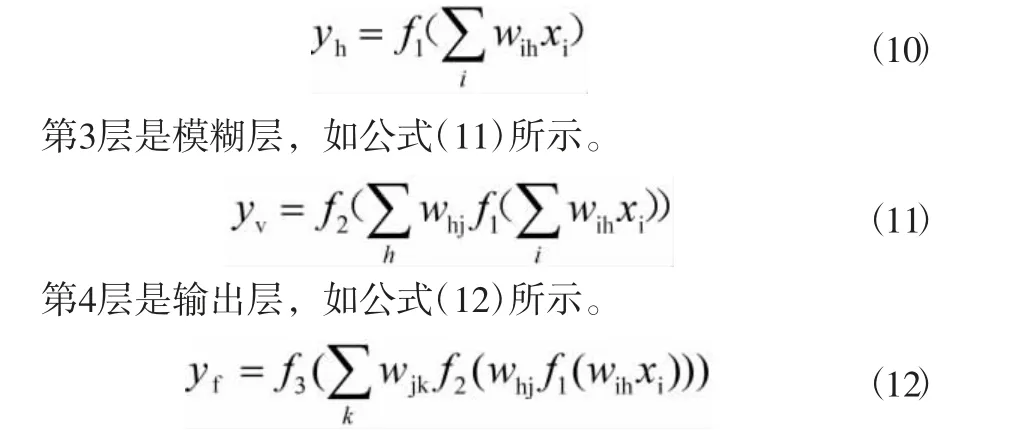
式中,xi——输入信号;yh——隐含层输出;f1——隐含层输出转移函数;yv——模糊层输出;f2——模糊层输出转移函数;yf——输出层;f3——输出层输出转移函数;wih——输入层至隐含层连接权值;whj——隐含层至模糊层连接权值;wjk——模糊层至输出层连接权值。
5.2 BP神经网络的训练
预处理后的工况数据划分为913个工况段,提取出14种工况段的特征参数,并将这些工况段分为4类,分别代表城市闹市工况、城市生活区工况、城市郊区工况和高速公路工况。将这4类工况作为工况识别的输出。14种工况识别特征参数的组合一共有16382种,本文综合考虑工况识别特征参数组合中特征参数的数量和所含代表性特征参数的个数,选取7类特征参数组合方式对测试工况进行工况识别,这7类特征参数组合方式如下:
A:平均速度vmean、巡航时间比rdrive。
B:行驶距离s、怠速时间比ridel、加速度平方和aspa、加速度方差avar、速度方差vvar、最大加速度amax、最大车速vmax、平均加速度amean、平均速度vmean、平均正加速度ameana、平均负加速度ameand、最小加速度amin、巡航时间比rdrive、速度方差vvar。
C:平均速度vmean。
D:行驶距离s、怠速时间比ridel、加速度平方和aspa、加速度方差avar、速度方差vvar、最大加速度amax、最大车速vmax、平均加速度amean、平均正加速度ameana、平均负加速度ameand、最小加速度amin、速度方差vvar。
E:平均正加速度ameana、平均负加速度ameand、最小加速度amin、巡航时间比rdrive、速度方差vvar。
F:行驶距离s、怠速时间比ridel、加速度平方和aspa、加速度方差avar、速度方差vvar、最大加速度amax、最大车速vmax、平均加速度amean、平均速度vmean、平均正加速度ameana。
G:最大车速vmax、平均加速度amean、平均速度vmean、平均正加速度ameana、平均负加速度ameand、最小加速度amin、巡航时间比rdrive、速度方差vvar。
因此神经网络的输入层分别为[913×14]、[913×2]、[913×1]、[913×12]、[913×5]、[913×9]、[913×7]的两个数组,输出层为913个工况段对应的4种不同工况类别[913×4]。
5.3 基于BP神经网络的工况识别
用采集到的一段城市行驶工况进行工况识别的仿真验证,此行驶工况共长56580s,测试工况如图7所示,图8为测试工况的实际分类结果。运用BP神经网络对测试工况进行工况识别,图9是运用A~G类特征参数组合方式进行工况识别的结果。图9中的工况类别a、b、c、d分别代表城市闹市工况、城市生活区工况、城市郊区工况和高速公路工况。
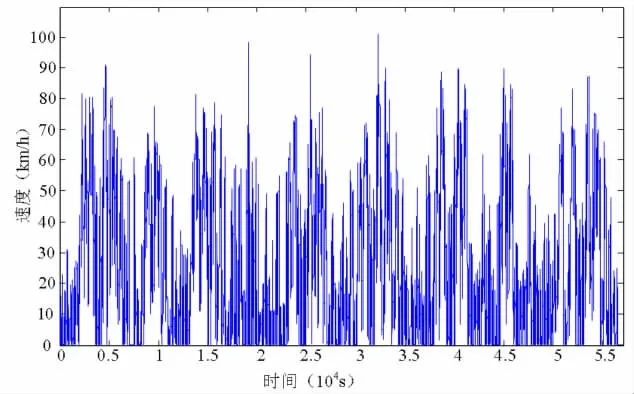
图7 测试工况
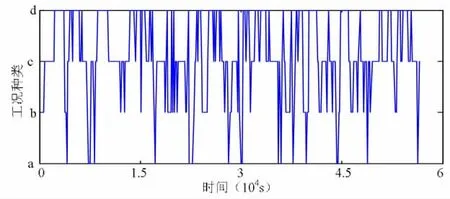
图8 测试工况实际工况类别
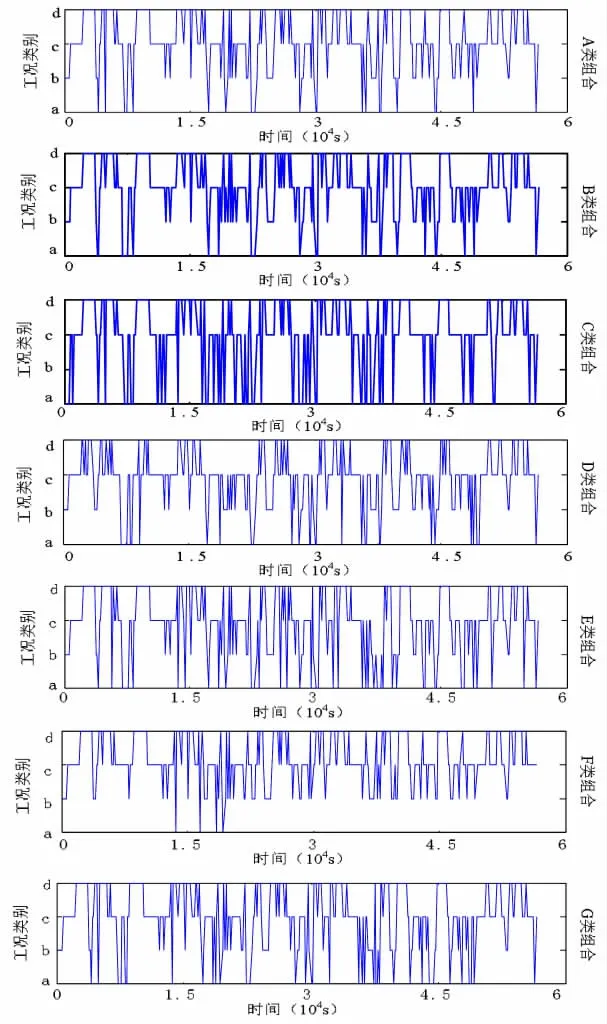
图9 运用各类特征参数组合工况识别结果
5.4 工况识别结果分析
运用A~G类特征参数组合方式对测试工况进行工况识别的准确率分别为:99.8%、97.61%、75.33%、81.17%、92.04%、93.37%、94.43%。工况识别速度是取每种组合方式对测试工况进行10次工况识别后的速度平均值,A~G类特征参数组合方式的工况识别速度分别为0.0174s、0.4224s、0.0160s、0.4018s、0.0162s、0.0299s、0.0231s。
通过上述数据可以发现:只包含两个代表性特征参数的A类特征参数组合方式,识别准确率最高,识别速度相对较快;不包含两个代表性特征参数而包含其它12种特征参数的D类特征参数组合方式,识别准确率较低,识别速度慢;包含一个代表性特征参数的E、F、G类特征参数组合方式识别准确率较高,识别速度一般;只有一个代表性特征参数的C类特征参数组合方式,识别速度虽然快,但是识别准确率最低。
因此我们可以得出结论:工况识别速度与工况识别特征参数的个数密切相关系,工况识别的特征参数个数越少,工况识别速度越快;工况识别的准确率取决于特征参数组合方式是否包含代表性特征参数,随包含代表性特征参数的增加,识别精度会在一定程度上提高;综合考虑识别准确率和识别速度,只包含代表性特征参数平均速度和巡航时间比的特征参数组合方式为最优组合方式。
6 结论
1) 为了进一步提高工况识别的精度和速度,通过实车实验采集某城市汽车运行工况数据,将预处理后的工况数据划分为工况段,再提取出工况的特征参数。综合考虑各特征参数之间的相关性、各特征参数同油耗的相关性以及各参数的变化速率和变化程度,对行驶工况特征参数进行优化,得到平均速度和巡航时间比两个代表性特征参数。
2) 选用7种特征参数组合方式,并应用BP神经网络对测试工况进行识别。识别结果表明:工况识别的特征参数个数越少,工况识别速度越快;工况识别的准确率取决于特征参数组合方式是否包含代表性特征参数,随包含代表性特征参数的增加,识别精度会在一定程度上提高,而只包含代表性特征参数的组合为最优组合,能够很好地对行驶工况进行识别,识别精度高、速度快,验证了行驶工况特征参数优化方法的有效性。