基于模型预测控制的PHEB能量管理策略
2022-12-28王乐妍
王乐妍
基于模型预测控制的PHEB能量管理策略
王乐妍
(长安大学 汽车学院,陕西 西安 710064)
文章针对一款串联插电式混合动力城市公交,提出一种可实时应用的模型预测控制(MPC)能量管理策略,以能耗最小为目标优化整车功率分配。首先,基于马尔科夫链根据历史车速和加速度建立单步和多步速度预测模型;从而进行预测时域内滚动优化,选择动态规划算法(DP)得到动力系统最优控制序列;最后对比了基于模型预测、动态规划和庞特里亚金极小值原理(PMP)的能量管理策略。结果表明,提出的模型预测控制(MPC)能达到与全局优化算法相近的控制效果且能应用于实时控制,是其他两种方法不具备的,体现出该策略的优越性。
能量管理策略;插电式混合动力客车;马尔科夫链;模型预测控制
插电式混合动力客车(Plug-in Hybrid Electric Bus, PHEB)既可以节能减排,又能克服驾驶员的里程焦虑问题,同时还可以配置较小功率的发动机,以紧凑整车结构,成为城市客车的主要应用车型之一,因此,受到了全世界汽车生产商和研究机构的广泛关注。
PHEB的能量管理策略可以优化车辆工作模式以提高整车燃油经济性,能量管理控制方式主要有基于规则的方法,如电量消耗—电量维持策略[1],其控制逻辑简单、便于实施,但会造成功率利用不充分;基于优化的方法,如(Dynamic Progr- amming, DP)[2],其具有全局最优性,可以作为衡量其他能量管理策略性能优劣的基准,但计算量大不具有实时性。庞特里亚金极小值原理(Pontry- agin's Maximum Principle, PMP)[3]同样是一种全局优化算法,需提前获得工况信息,也只能离线应用;基于等效能耗最小化的能量管理策略(Equi- valent Consumption Minimization Strategy, ECMS)[4],可以实时应用,但其效果极大地依赖等效因子等参数。而模型预测控制(Model Predictive Control, MPC)[5]可以在较短的预测时域内使用马尔科夫模型和局部优化算法进行计算,具有普适性和在线应用的能力。
基于以上分析,本文针对一款串联插电式混合动力城市客车,首先应用马尔科夫模型进行速度预测,在此基础上进行滚动时域内的控制优化,最后对比不同策略效果,使用MATLAB完成仿真分析。
1 PHEV车辆模型
1.1 动力系统模型
所研究的PHEB车型采用串联结构,整车动力系统结构如图1所示,整车和电池参数见表1。动力源由天然气发动机与ISG电机组成的动力辅助单元(Auxiliary Power Unit, APU),以及动力电池组成,APU输出功率与电池输出功率的最优分配是本文研究要点。
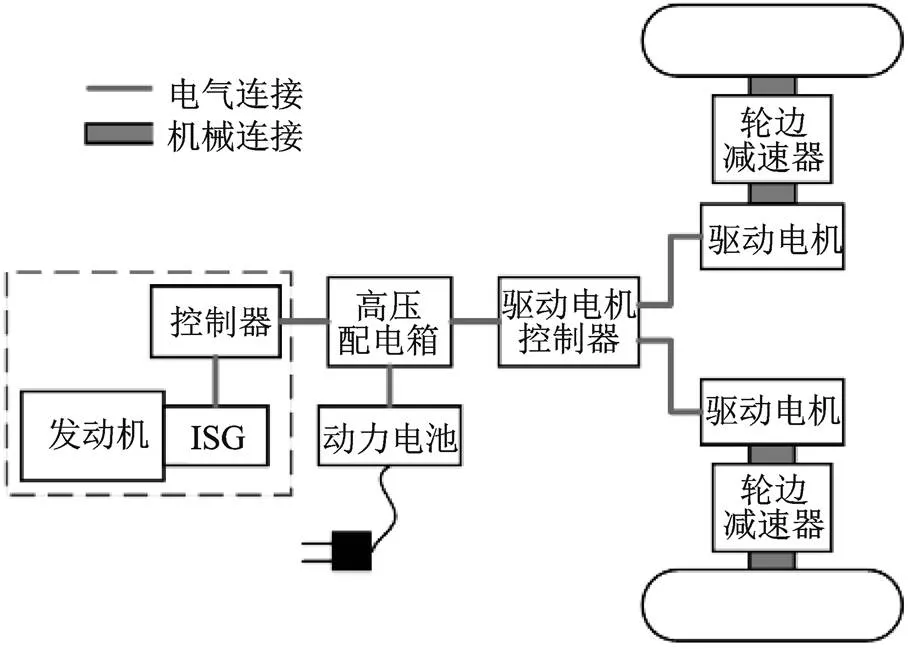
图1 整车动力系统结构图
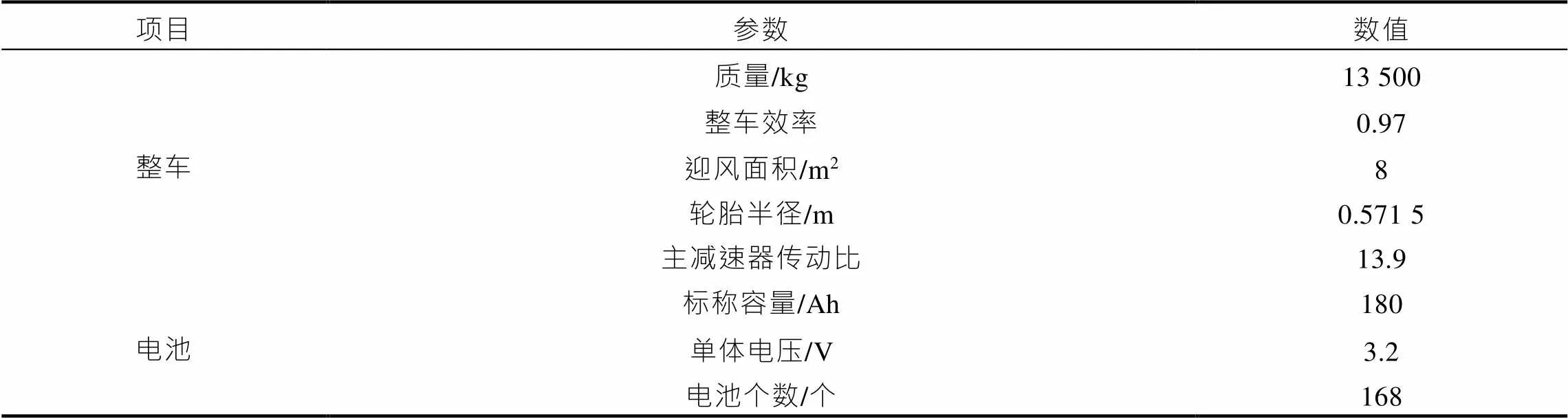
表1 整车及电池参数
1.2 电池模型
动力电池为磷酸铁锂电池,电池的充电状态(State Of Charge, SOC)的动力学方程为

1.3 整车纵向动力学模型
整车的功率平衡方程可表示为

req+aux=apu+b(3)
式中,req为驱动车辆的需求功率;为车速;m为传动系统的机械效率;为整车的质量;为滚动阻力系数;D为空气阻力系数;为车辆迎风面积;为整车旋转质量换算系数;apu为APU输出功率;aux为整车附件消耗功率。
2 基于MPC的能量管理策略
MPC是一种采用在线滚动优化和反馈自校正来求解的数学模型,主要由预测模型、滚动优化、反馈校正三部分组成[6]。
2.1 马尔科夫速度预测模型
车辆行驶过程中的加速度变化可视为马尔科夫过程,即未来的取值只与当前取值有关,与历史取值无关,是一种离散型的随机过程[7]。以中国典型城市循环(Chinese typical City Bus driving Cycle, CCBC)为例进行车速预测,首先将工况中车速信息按5 km的间隔进行离散,加速度以0.05 m/s2进行离散为有限多个。

其中,和分别为速度和加速度离散个数。进而统计速度为v(1≤≤)时,加速度由a转移到a(1≤,≤)的次数N,以及转移到任意加速度的总次数N。
从而得到状态转移概率P,计算式为

进而可得某一离散速度v对应的一步转移矩阵,计算为
(6)
共得到个一步转移矩阵;最后利用当前时刻车速()、加速度()和对应一步转移矩阵中概率最大值作为下一时刻加速度max,预测车速为
(+1)=()+max(7)
选用均方根误差(Root Mean Square Error, RMSE)来描述速度预测的准确性,计算式为
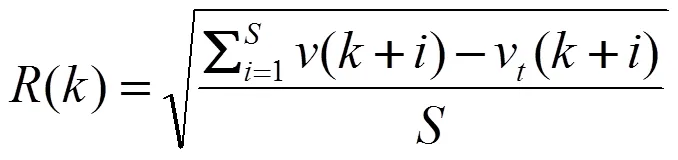
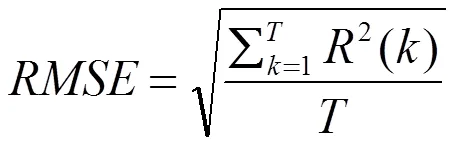
式中,()为预测时域内误差;为预测时长;(+)为预测时域内第时刻的预测速度;(+)为预测时域内第时刻的真实速度;为工况总时长;越小,则预测值越准确。
多步马尔科夫模型类似单步模型的步骤,不同之处在于多步预测模型依据当前速度和加速度信息建立未来多个时刻的马尔科夫转移矩阵,而不再是下一时刻的,这样做的好处是不会产生叠加误差。
2.2 DP在模型预测中的应用
在MPC预测时域内采用DP求得一个短时的全局最优解,以为状态变量,输出功率为控制变量,以行程最小总成本为目标建立模型。


为限制的下降速度,给出参考轨迹为

式中,ref为时刻的参考值;()为已行驶时长;start和end为起点和终点值,分别取0.8和0.33。
综上,可得到每一个滚动时域内最优控制序列,只取第一个控制量用于实时控制,整个过程使用下一时刻的预测速度计算当前时刻的控制量,实现了反馈校正。
3 仿真分析
3.1 速度预测
建立单步马尔科夫转移矩阵和多步马尔科夫转移矩阵如图2所示,分别得到不同预测时长的均方误差如表2所示。
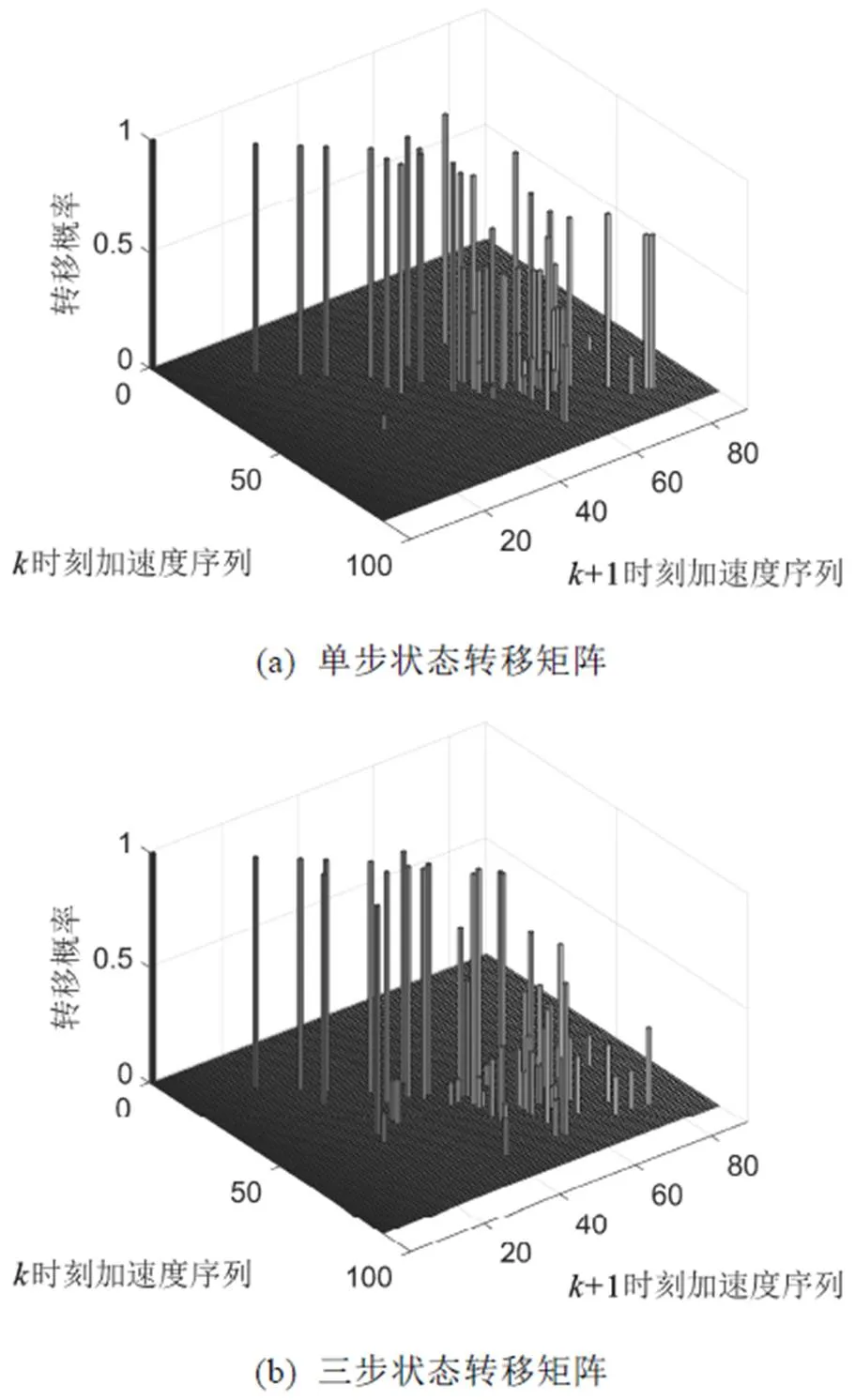
图2 马尔科夫状态转移矩阵
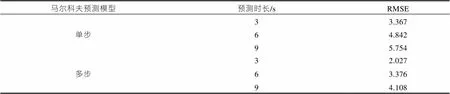
表2 模型均方误差值
可以看出,两种模型的预测速度能很好地跟随实际车速。多步马尔科夫模型较单步马尔科夫模型误差更小一些,是由于单步预测模型在预测时域内每一秒的预测速度都是由上一步速度和加速度得到,导致误差叠加。而多步预测模型在预测时域内每一秒的预测速度都是依据当前步的速度和加速度得到。对比不同预测时长发现,随着预测时长的增加,两种模型的预测误差也随之增大,分析是由于未来长时间的车速与当前时刻车速和加速度的相关依赖程度降低导致。
由于MPC是一种局部寻优策略,考虑计算精度和运算时间,后续采用预测时长为3 s的多步马尔科夫模型,三步马尔科夫预测效果如图3所示。

图3 三步马尔科夫局部预测效果图
3.2 仿真结果对比
设定初始为0.8,目标值为0.33,采用16个CCBC工况(共计94.4 km,5.84 h)进行仿真分析。为验证所提出模型预测能量管理策略的性能优劣,将本策略与全局优化策略对比。DP是一种收敛到全局最优的优化算法,尽管DP是一种离线算法,但可以作为评价基准来评估和改进在线算法[8]。由于MPC内层同样使用DP局部寻优,为全面评估其有效性,进一步采用另一种全局优化算法PMP进行对比说明。表3对比了基于MPC、DP以及PMP的能量管理策略控制效果,图4为三种控制策略的值变化轨迹对比图。可以看出,MPC总成本比DP增加了4.7%,比PMP增加了3.3%,三条曲线基本趋于一致,均能在行程终点接近目标值,即可在线应用的MPC几乎可以达到与全局优化算法相同的控制效果。
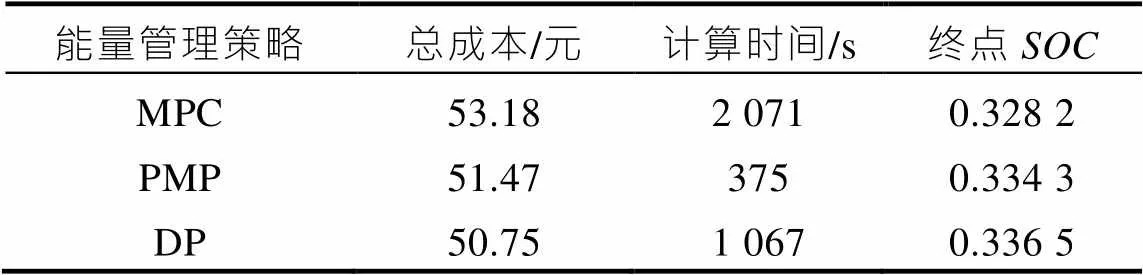
表3 三种策略结果对比

图4 SOC变化轨迹
4 结论
本文针对一款串联插电式混合动力客车,建立了基于模型预测的能量管理策略来优化动力系统控制,并对比了以下两种全局优化算法的控制效果。
(1)以CCBC为基础建立单步和多步马尔科夫速度预测模型,对比分析不同预测时域的预测结果,多步速度预测模型具有较好的预测结果。
(2)具有实时性的MPC具有较理想的控制效果,仅比DP和PMP成本高出4.4%和3.7%,可以有效提高整车燃油经济性。
[1] 罗国鹏,罗禹贡,李克强.基于最佳电能使用的插电式混合动力客车控制策略[J].汽车工程,2012,34(6): 475-478.
[2] 张盟阳.基于动态规划的PHEV能耗分析[J].汽车实用技术,2021,46(16):130-133.
[3] XIE S,QI S,LANG K.A Data-Driven Power Manage- ment Strategy for Plug-In Hybrid Electric Vehicles Including Optimal Battery Depth of Discharging[J]. IEEE Transactions on Industrial Informatics,2020,16 (5):3387-3396.
[4] 林歆悠.混联式混合动力客车功率均衡能量管理控制策略研究[D].重庆:重庆大学,2011.
[5] 解少博,刘通,李会灵,等.基于马尔科夫链的并联PHEB预测型能量管理策略研究[J].汽车工程,2018,40(8): 871-877,911.
[6] 梁宏宇.基于模型预测的插电式混合动力汽车控制策略研究[D].合肥:合肥工业大学,2020.
[7] 解振方.基于预测的混合动力汽车最优动力分配控制策略[D].杭州:浙江工业大学,2015.
[8] RUI W,LUKIC S M.Dynamic Programming Techniquein Hybrid Electric Vehicle Optimization[C]//2012 IEEE International Electric Vehicle Conference. Piscataway: IEEE,2012.
Energy Management Strategy of Plug-in Hybrid Electric Bus Based on Model Predictive Control
WANG Leyan
( School of Automotive Engineering, Chang’an University, Xi’an 710064, China )
A series plug-in hybrid city bus is used to optimize control sequence of the powertrain system with the goal of minimizing energy consumption based on model predictive control (MPC) energy management strategy, which can be applied in real time. Firstly, a single and a multi-step speed prediction model based on Markov chain is established according to the historical speed and acceleration. The dynamic programming (DP) algorithm was used to obtain the optimal control sequence of the dynamical system. Finally, the energy management strategies based on model predictive control(MPC), DP and PMP are compared. The results show that the proposed MPC can achieve the control effect similar to the global optimization algorithm and can be applied to real time control, which is not available in the other two methods. It reflects the superiority of this strategy.
Energy management strategy;Plug-in hybrid electric bus;Markov chain;Model predictive control
U469.1
A
1671-7988(2022)23-35-05
U469.1
A
1671-7988(2022)23-34-05
10.16638/j.cnki.1671-7988.2022.023.007
王乐妍(1998—),女,硕士研究生,研究方向为新能源汽车整车控制与能量管理,E-mail:164560327@qq.com。
