一种立方星编队重构多脉冲机动规划方法
2022-12-26刘幸川陈丹鹤廖文和
徐 根,刘幸川,陈丹鹤,廖文和
(南京理工大学机械工程学院,南京 210094)
0 引 言
随着冷气推进[1]、电推进[2]等微推进系统向着低功耗、小尺寸、模块化的方向发展,使得立方星具备了轨道机动控制的硬件基础,拓展了低成本立方星的在轨应用领域。国内外多次开展了立方星执行轨道机动控制的在轨演示,如加拿大多伦多大学的CAN-4/5双星编队任务[3]、Tyvak纳卫星公司的CPOD交会操作试验[4]、Aerospace公司的AeroCube-10绕飞观测试验[5]等项目,验证了立方星在复杂空间任务中具备较广阔的应用潜力,如编队飞行等任务。
目前,队形构建、重构和维持过程中的机动规划方法仍然是编队飞行应用的关键问题。诸多学者已经对相对运动建模、机动规划以及摄动优化等方面开展了研究。
针对近圆轨道上的编队飞行问题,HCW方程提供了最经典的相对运动模型,广泛应用于相对运动机动规划与控制中[6-7]。但是以相对位置速度矢量为状态量不能直接反应相对运动轨迹的几何特性,不利于编队队形设计和任务规划。Härting等在静止轨道卫星防碰撞问题中采用了基于相对偏心矢量和相对倾斜矢量的建模方法,D’Amico等[8]在此基础上提出了相对轨道根数(ROE)模型,应用于低轨卫星编队任务的GNC算法中,并在GRACE[9],TanDEM-X/TerraSAR-X[10],PRISMA[11],AVANTI[12]等任务中获得了验证。ROE模型不仅提供了相对轨道运动的几何解释,并且基于相对偏心矢量和相对倾斜矢量提供了一种简便的被动安全编队队形的设计方法[13]。Gaias团队[14-15]分析了J2摄动和大气阻力摄动对低轨编队的影响,构建了高精度的相对运动模型,并考虑到星载计算约束,将差分气动阻力的影响转换为相对轨道高度的固定漂移,获得适用于星载计算的ROE状态转移模型[16]。
对于星间距离较大的交会、编队构建和重构等任务,通常采用基于脉冲推力的机动规划方法。孟云鹤等[17]在HCW方程的基础上,分析了脉冲机动与相对运动之间的关系,研究了燃耗最优的组合脉冲机动求解方法。根据相对轨道运动的特性,这些研究中先将面内分量与面外分量的控制解耦,再研究面内各分量之间的控制耦合关系,从而获得脉冲机动的解析解。而Gaias等[18]、Di Mauro等[19]、Lim等[20]以及Liu等[21]基于ROE模型,从几何角度阐述了脉冲机动对相对轨道的影响,针对面内各分量的控制耦合问题,给出了多种脉冲组合下的二/三/四脉冲解析解。
上述机动规划相关的研究重点,是获得燃耗最优的脉冲机动的解析解,通常不考虑机动规划的工程约束。而对于立方星的轨道机动任务,往往会由于姿态稳定控制饱和或推进系统工作时长约束等问题,使得立方星单次机动的速度增量受到约束。对于较大范围的编队队形重构任务,无约束下的脉冲机动解析解往往超出立方星的轨道机动能力,因此立方星轨道控制算法需要具备在机动能力约束下可靠的机动规划能力。
针对近地轨道上的立方星编队飞行面内队形重构问题,本文提出了一种适用于立方星星载计算的多脉冲机动规划算法。首先,梳理了基于相对轨道根数的相对运动理论基础,包括相对轨道根数定义、考虑近地轨道J2摄动和大气阻力摄动的线性化状态转移模型、以及脉冲机动对相对轨道根数的控制模型。其次,基于相对运动面内分量和面外分量解耦的特性,提出燃耗最优的多脉冲机动规划算法,解决了规划过程中的单次机动速度增量约束,并提出迭代优化策略,提高机动规划终点精度。最后,基于“田园一号”立方星平台开展了编队面内构型重构任务的仿真验证和分析。
1 基于相对轨道根数的运动模型
1.1 相对轨道根数定义
基于经典轨道根数α=(a,e,i,ω,Ω,M)T,定义在目标星参考系下的无量纲相对轨道根数[8]:
(1)
式中:u=M+ω为平均纬度辐角,下标c和d分别代表目标星和机动星(为简化描述,后续公式中不带下标的绝对轨道根数均为目标星参数)。相对轨道根数δα六个分量可分为轨道面内分量和轨道面外分量,面外分量为相对倾斜量δi,aδi描述了相对运动的法向振幅和初相位,面内分量包括相对高度δa、相对平均纬度幅角δλ以及相对偏心量δe,其中δa和aδe描述了相对运动轨迹在轨道面内投影的形状,包括平面内运动的振幅、初相位、径向偏移和迹向距离漂移速度,aδλ描述了两星之间的迹向距离。
(2)
在二体动力学下的ROE运动模型可表达为:
δα(t)=ΦHCW(t,t0)δα(t0)
(3)
其中状态转移矩阵可表达为:

(4)

1.2 摄动影响
对于近地轨道运行的卫星,轨道摄动的主要来源是地球非球形重力场的二阶纬向分量J2摄动和大气阻力摄动。本节对J2摄动和大气阻力摄动的影响进行分析和建模。
1.2.1J2摄动影响
通过将J2摄动对绝对轨道根数的影响投影到ROE空间,并通过保留一阶项的方式完成线性化,获得包含J2摄动影响的ROE状态转移矩阵[14]:
ΦHCW+J2(t,t0)=
(5)
式中:
(6)
式中:RE为地球半径。由式(5)可知,在J2摄动作用下,相对偏心量的方向将会发生旋转,旋转角速度主要取决于目标星轨道的高度和倾角,旋转方向取决于目标星轨道的倾角。此外,卫星的平均运动速度和升交点赤经都会受J2摄动影响产生漂移,从而对编队卫星之间的迹向距离产生了影响,迹向距离漂移的方向取决于目标星轨道倾角和两星相对高度。
1.2.2大气阻力摄动影响
低轨稀薄大气产生的阻力会使卫星产生沿负切向的加速度。由于弹道系数和面质比的差异,编队卫星之间存在大气阻力加速度的差异[22]:
(7)
其中ρ为大气密度,v=na为目标星的平均运动速度,S为卫星迎风面积,m为卫星质量,CD为卫星弹道系数。

(8)
(9)
其中大气阻力摄动对ROE的影响表达为:
Φdrag=
(10)
1.3 ROE脉冲控制模型
若机动星执行脉冲机动Δv=[ΔvR,ΔvT,ΔvN]T,产生的ROE变化为[18]:
(11)
由式(11)可以看到,ROE的面内分量δa,δλ,δe和面外分量δi的控制是解耦的。对于法向相对运动,可通过在特定相位施加一次法向脉冲实现对δi的控制:
(12)
而径向/迹向平面内的相对运动显然存在控制耦合问题:一方面各面内分量之间存在控制耦合,一次脉冲会对多个分量产生影响;另一方面切向脉冲和径向脉冲的控制效果存在重叠,两个方向的脉冲控制均会对δe产生影响,但切向脉冲的控制效果是径向脉冲的控制效果的2倍。
2 相对运动面内重构规划算法
由于径向脉冲无法控制δa,且考虑到燃耗最优问题,因此本文所提出的机动规划方法仅使用切向脉冲。针对面内各分量之间的耦合关系,由于切向脉冲对δa和δe的控制为瞬时变化,而对δλ的影响需要经过时间的累积。因此在规划过程中,按照“先规划相对形状控制机动,后规划迹向距离修正机动”的策略进行求解,先完成控制δa和δe的机动规划,再进行修正δλ的机动规划。
2.1 机动约束下的多脉冲机动规划算法
对于相对轨道面内分量的控制,由于单次切向脉冲对δa和δe的控制存在耦合,可通过两次执行相位相差180°的切向脉冲实现对δa和δe的分离控制:
(13)
两次脉冲机动的执行相位为
(14)
由于立方星体积和质量的约束,所配备的推进系统和姿态控制系统往往结构简单、控制能力有限。一方面,微推力器的推力较小,无法在较短时间内提供较大的速度增量;另一方面,由于推力偏心,会使姿态稳定控制饱和,推进系统单次工作时间受到限制,使得立方星单次轨道机动存在最大速度增量约束。此外,在两次轨道机动执行之间,立方星需要进行动量轮卸载、微推进器调整等工作,使得两次机动之间存在最小时间间隔的约束。因此,在立方星编队任务的机动规划中必须考虑速度增量与机动时间间隔约束。根据式(13)得到脉冲速度增量往往会超出立方星的单次机动能力。
而考虑到在二体运动下,δa和δe不随时间发生改变,根据式(11)可得:
(15)
一次切向脉冲对δa和δe的控制效果等价于由多次在同一相位执行的切向脉冲控制效果的线性叠加。因此针对单次机动速度增量约束,可将根据式(13)得到的脉冲机动分解为多个速度增量较小的脉冲机动逐轨执行。

(16)
并为分解后的机动逐轨分配执行时间:
(17)


(18)
将式(18)的形式转换为:
aΔδλΔvT=-3ΔvT(tf-tΔvT)
(19)
根据式(19)所建立的切向脉冲机动对迹向距离的控制模型,在施加M1+M2次相对形状控制机动后,迹向距离产生的变化为:
(20)

(21)
同样考虑到单次机动速度增量的约束,迹向距离修正机动通过多组脉冲组合实现:
(22)

(23)

(24)
显然,完成面内分量控制的所有机动需要满足:
(25)

(26)
(27)
实际任务中期望以较少的机动次数完成任务,因此每一次机动的速度增量都应接近于Δvmax。根据式(27)的目标函数,可将燃耗最优问题转换为使规划结果中的脉冲数量最少。注意到:
(28)
可得:

(29)
显然,机动规划结果中∑Qi应为定值。为了使N的值最小,应当使每一组的两次脉冲执行时间的间隔QiT尽可能最大。因此在迹向距离修正脉冲执行时间分配时,需要在满足式(24)的约束下,按时间间隔从大到小依次搜索可行解,图1给出了机动执行时间的分配过程示意。

图1 多脉冲轨道机动规划执行时间分配示意Fig.1 Schematic diagram of execution time distribution in multi-impulse orbit maneuver planning
上述面内机动的多脉冲求解算法可总结为:
算法1.机动约束下的多脉冲机动规划算法
输入:目标星轨道根数αc,初始相对轨道δα0,终点目标相对轨道δαf,初始时间t0,终点时间tf,单次机动最大速度增量Δvmax,两次机动之间最短时间间隔Δtmin。


4) 根据式(25)和(29),确定迹向距离修正需求;

根据上述多脉冲机动规划算法,最终共获得了M1+M2+2N次脉冲机动。由于这些机动需要逐轨执行,因此对任务时间提出了要求:首先,任务时间需要满足相对形状控制机动的需要,总时间至少要大于M1轨或M2轨;其次,在任务时间内需要搜索到足够多满足最小时间间隔约束的Qi,满足迹向距离修正机动的需要。
2.2 机动规划的迭代优化策略
对于机动能力受限的立方星来说,执行较大范围的编队队形重构任务往往需要较长的时间,而算法1里的机动规划是基于二体运动获得的,对于较长时间的任务,轨道摄动产生的误差较为明显,不可忽略。需要对机动规划进行优化,降低机动规划的终点误差。
(30)
此外,注意到式(9)中的状态转移矩阵仅与时间有关,与状态变量无关,因此具备以下性质:
Φ(tk,ti)=Φ(tk,tj)Φ(tj,ti)
(31)
因此,若在中间时间tm引入状态变化后,得到的状态转移方程可表达为:
X(t)=Φ(t,tm)[Φ(tm,t0)X(t0)+ΔX(tm)]=
Φ(t,t0)X(t0)+Φ(t,tm)ΔX(tm)
(32)
由式(32)可以看到,终点状态可被分解为初始状态的自然转移和每次状态变化的自然转移的线性组合。因此依次执行根据算法1获得的脉冲机动序列后,在终点时刻的状态量为:
(33)
基于式(33)的线性化终点时刻状态计算公式,给出对机动规划进行迭代优化的步骤:
算法2.考虑摄动影响的机动规划迭代优化算法
输入:算法1的输入变量,终点误差范围,最大迭代次数。
2) 根据算法1,获取脉冲机动序列;
3) 根据式(33)计算机动执行的终点位置δα(tf);
5) 重复步骤2),直到满足终点误差,或达到最大迭代次数。
3 仿真校验
为了校验本文所提出的多脉冲机动方法的有效性,根据“田园一号”立方星的相关参数进行任务仿真,在星箭分离约7日后开始进行跟随编队构建任务。任务目标为构建在目标星迹向后方50 km处跟随飞行的队形,并降低两星的相对偏心率,机动规划算法需要完成从初始队形到目标队形的重构任务。以搭载同一运载火箭入轨的另一颗立方星“金紫荆二号”为目标星,以“田园一号”立方星为机动星,两颗卫星的弹道系数相同,均取CD=2.2。主要仿真参数如表1所示:
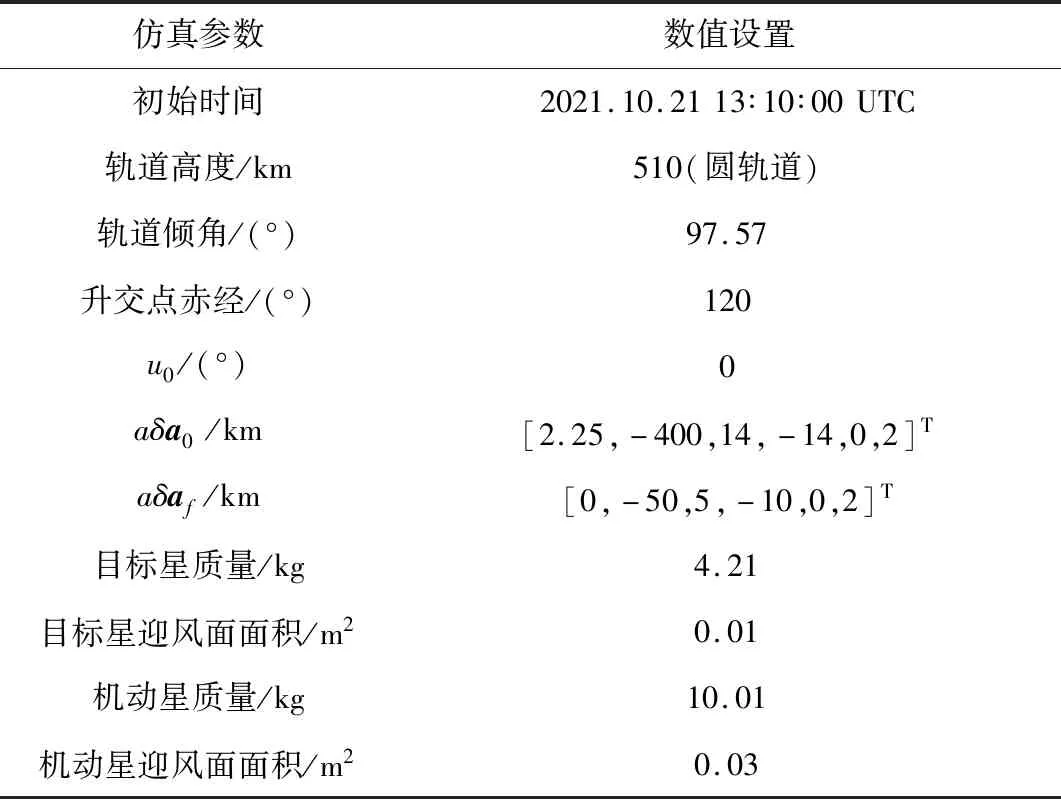
表1 主要仿真参数Table 1 Main simulation parameters
“田园一号”立方星所使用的冷气微推力器的标称推力为3.6 mN,采用零动量轮系进行姿态三轴稳定控制,动量轮饱和后,需要使用三轴磁力矩器进行动量卸载。单次轨道机动最长时间为4 min,即微推力器单次工作最大速度增量约为0.085 m/s,微推力器两次工作之间时间间隔至少为20 min。
结合“田园一号”立方星的姿轨控能力,并考虑到低轨卫星轨道运行周期,为了便于搜索迹向修正机动的可执行时间,设定迹向距离修正机动的执行相位取决于相对形状控制机动的执行相位:
(34)

(35)
其中可执行机动的时间点需要满足时间约束:
(36)
在除去执行相对形状控制机动的时间点后,每个相位可对应Ji个可用于执行迹向距离修正机动的时间点,将可行时间点一前一后依次组合,得到间隔时间从大到小的N#i个脉冲机动组合:
(37)
考虑到算法1中的任务时间要求,由式(37)获得的脉冲机动组合需要满足:

(38)
若式(38)的条件不能得到满足,则总任务时间过短,无法到达目标迹向位置,需要增加任务时间。若式(38)的条件满足,则对Q#进行排序,从大到小依次选取Qi,直至满足式(28)的条件,从而完成对迹向修正机动的规划。
3.1 多脉冲机动规划算法仿真校验
根据任务仿真参数设置,轨道机动需要实现的相对轨道高度与相对偏心量变化量为:
计算得到无约束下的相对形状控制机动:

图3 任务2:机动约束下在60轨内完成队形重构Fig.3 Mission 2:Complete formation reconfiguration within 60 orbits with constraints
显然,“田园一号”立方星无法仅通过两次脉冲机动完成对相对偏心量和相对轨道高度的控制,需要根据算法1获得满足约束的机动序列。
对相对形状控制机动进行分解:
在执行完所有机动序列后,相对运动轨迹如图2(c)所示。在增加迹向距离修正机动后,机动终点可以达到目标迹向相对位置。针对在40轨内完成队形重构任务,算法1共规划了87次脉冲机动,总速度增量需求约为7.250 m/s。
若增加任务时间,在60轨内完成队形重构任务,仿真结果如图3所示。可以看到通过调整执行时间,仅执行相对形状控制机动即可到达距离目标终点较近的位置,仅需增加一组速度增量较小的迹向距离修正机动即可。与任务1相比,任务2减少了迹向距离修正机动的燃耗,总速度增量需求约为5.443 m/s。
3.2 迭代优化策略仿真校验
基于任务1所获得的脉冲机动序列,分别根据不同的状态转移模型计算终点相对轨道。其中,从星载机动规划的角度,取任务时间内的平均大气密度为6.569×10-13kg/m3(基于NRLMSISE-00大气密度模型计算)。

表2 摄动影响下的终点相对轨道误差Table 2 Terminal ROE errors under perturbation

根据算法2对任务1的编队重构任务的机动规划列进行迭代优化,过程如表3所示,经过3次迭代,即可将面内分量的终点误差都降低至1 m以内。

表3 迭代优化过程Table 3 Process of the iterative optimization

表4 迭代优化结果对比Table 4 Comparison of the iterative optimization results

图4 迭代优化后的相对偏心量机动轨迹Fig.4 Trajectory of relative eccentricity vector after iterative optimization
表4中对算法1和算法2的机动规划结果进行了对比。经迭代优化后,机动规划的燃耗需求有了较显著的降低,主要源自相对形状控制机动的燃耗需求降低。

算法2的优化变量实际上是算法1输入值中的目标相对轨道δαf。如图4所示,经过迭代优化后,算法1需要控制的相对偏心量发生了改变:
与任务目标相比,经迭代优化后,算法1的输入值中Δδe大小变小,因此降低了机动规划的燃耗需求,同时Δδe方向的变化也使机动的执行相位发生了变化。由此可见,在规划中考虑J2摄动会主要影响相对偏心量的控制,目标星轨道的倾角会决定相对偏心量的漂移方向和漂移速率,对燃耗的影响需要结合目标星轨道的半长轴、倾角和编队队形重构的具体参数进行定量分析。
3.3 机动规划算法在复杂摄动下的适应性分析
为了分析算法2的迭代优化策略的效果,图4中的相对偏心量轨迹是通过式(33)的状态转移模型获得的。本节基于高精度轨道递推[23]和瞬/平根数转换[24]进行机动规划算法的验证,仿真验证的流程如图5所示。
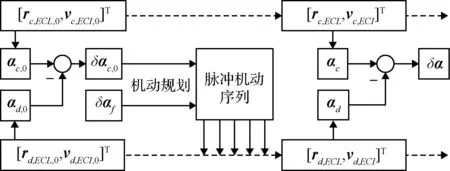
图5 仿真验证流程Fig.5 Scheme of algorithm verification
图5中虚线部分表示高精度轨道递推,包括21×21阶的地球引力场模型、大气阻力模型以及日月第三体引力。仿真初始参数设置如表5所示。
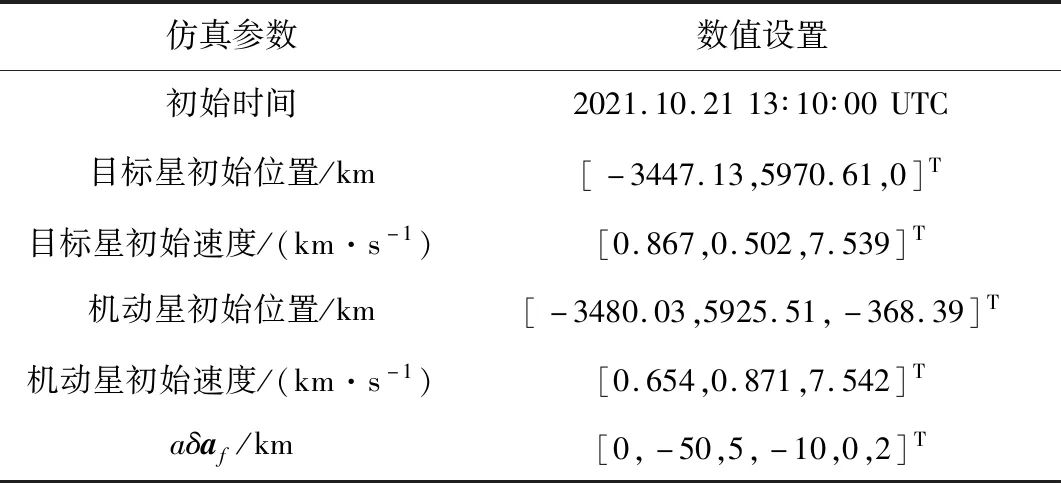
表5 仿真初始参数Table 5 Initial simulation parameters
分别采用算法1和算法2进行机动规划,进行仿真。得到如表6所示的终点相对轨道误差,相对偏心率控制轨迹如图6所示。

表6 两种机动规划算法的终点相对轨道误差Table 6 Terminal ROE error of two planning algorithms

图6 高精度轨道递推下的相对偏心量机动轨迹Fig.6 Trajectory of relative eccentricity vector under numerical propagation with high-fidelity perturbation
与算法1相比,算法2中的状态转移模型能够较准确地体现地球非球形摄动的影响,可以预估相对偏心量的方向漂移并加以修正,使得终点位置的相对偏心量与目标相对偏心量方向一致,有利于维持编队在径向/法向平面上的投影。
在实际在轨任务中,考虑到测定轨误差和轨道机动执行误差等因素,不能仅依靠初始时刻的机动规划进行完全的开环控制,需要在过程中修正机动规划,因此算法1和算法2在实际在轨任务中均可使用。算法1的计算量较小,在机动过程中可以增加多次重规划;而算法2在迭代的过程中需要重复运行算法1,计算量是算法1的4~6倍,但算法2的规划误差更小,可以降低机动重规划的频率。
4 结 论
针对轨道机动能力约束下的编队队形面内重构机动规划问题,本文基于相对轨道根数提出了一种简便的多脉冲机动规划算法和迭代优化策略,结合仿真校验可得如下结论:
(1) 本文所提出的多脉冲机动算法可有效解决速度增量约束和时间间隔约束,能可靠地获得燃耗最优的机动序列。面内队形重构任务仅需执行切向脉冲,可简化立方星结构,无需安装径向推力器。
(2) 结合考虑J2摄动和大气阻力摄动的线性化相对状态转移模型,本文所提出的迭代优化策略可快速有效地降低摄动影响下的终点误差。
(3) 摄动因素会影响机动的燃耗需求,本文中对摄动影响的分析可为编队队形重构的参数设计提供参考。
鉴于相对轨道面内面外运动解耦的特性,本文所提的算法和任务仿真仅针对面内分量控制,后期将进行考虑面外分量控制的综合规划策略研究,提高该方法在立方星编队任务中的工程适用性。
