中低速磁悬浮TWC环线动态建模与仿真研究
2022-12-26孟天旭党海笑白英杰
吴 进,孟天旭,党海笑,白英杰
(北京全路通信信号研究设计院集团有限公司,北京 100070)
中低速磁悬浮是我国具有自主知识产权的一项新技术,是目前城市轨道交通[1]中的先进技术,是中国城市轨道交通多元化其中的一个重要角色[2]。磁悬浮列车工作时主要利用了电磁铁同性排斥异性吸引的基本原理,利用电磁力抵消重力。而TWC环线系统是常见于中低速磁悬浮线路中用于车地通信的系统,但在实际应用中,若通信空间内存在空间场骚扰,可能导致通信异常从而引起故障。因此对中低速磁悬浮列车的TWC环线系统的场分布情况和电磁场耦合机理的研究具有重要意义。
1 TWC环线工作原理
中低速磁悬浮列车的TWC接收和发射天线通过电磁感应来实现双向通信。当外部的电磁波叠加到双向通信的系统,且达到一定强度时,会导致通信故障,列车导向安全侧。
中低速磁悬浮列车的TWC环线的结构及原理如图1所示,其工作原理为:区域控制器(Zone Controller,ZC)把列控命令和列车自动监督(Automatic Train Supervision,ATS)的信息通过CAN总线发送给轨旁发送设备,发送设备调制后经过功放进行放大,经环线检测滤波设备、传输电缆送到室外始端匹配单元、环线和终端匹配单元上,车载接收天线感应到的信号送给接收设备进行解调,通过CAN总线发送给车载列车自动防护(Automatic Train Protection,ATP)主机,列车自动运行(Automatic Train Operation,ATO)信息内容由车载ATP转发给车载ATO主机,车载ATP和ATO主机收到命令数据后通过CAN总线把应答命令数据发送给车载发送设备,发送设备调制后经过功放进行放大,经发送天线发射到轨旁环线,轨旁环线把感应到的信号经过传输电缆送给室内环线检测滤波设备,经处理后送给地面接收设备进行解调,接收设备解调后通过CAN总线发送给ZC。车载ATP发送的应答命令数据包含当前列车的位置信息,ZC根据该信息确认环线占用情况,生成后续列车的控车命令[3]。
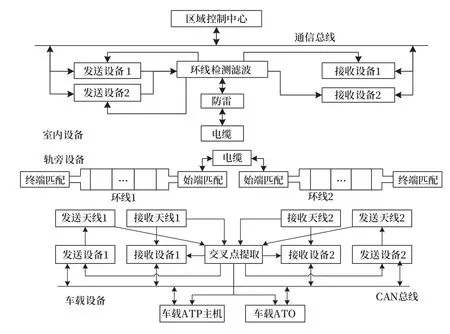
图1 TWC环线结构及原理示意Fig.1 TWC loop structure and principle
2 TWC环线通信原理
中低速磁悬浮列车的TWC环线的形状呈数字8型排列在平面上,环线内以正弦形式电信号信息传输。上行链路信号传输使用35.8±0.4 kHz的FSK信号,下行链路信号传输使用54±0.4 kHz的FSK信号和9 kHz的监测信号。
上行链路信号传输技术指标为:载波中心频率35.8+0.4 kHz,数据传输速率1 200波特率,报文码长83 bit;下行链路信号传输技术指标为:载波中心频率54+0.4 kHz,数据传输速率600波特率,报文码长43 bit。车辆控制中心(VCC)至车载控制中心(VOBC)的上行链路信号传输,通过中心馈电设备和馈电设备送入TWC环线[4],然后,车载接收天线与TWC环线产生的时变电磁场进行感应耦合,进而将命令报文传输给VOBC。每个TWC环线通道每隔70 ms的工作周期,输出一个83比特位的串行命令报文[4],数据传输速率为1 200 bit/s。同样,VOBC的信息报文以600 bit/s的传输速率发送43比特位的报文,经过TWC环线与发射天线的电磁感应,信号的提取与放大,最后将数据传输给VCC。
3 仿真建模及验证
中低速磁悬浮列车的TWC环线所处状态可分为两类:一类为TWC环线上方无列车,另一类为TWC环线上方有列车。因此,电磁仿真时采取对TWC环线线缆本身施加激励源,模拟无车状态;在TWC环线以外的位置,添加激励源,模拟有车状态。TWC环线与车载接收天线之间通过电磁感应,完成上行链路信号传输。其中,TWC环线作为发射天线,车载接收天线接收信号。
由于测试设备安装在测试环境需要协调多方进行配合安装,其过程用时较长;每次需进行测试方案的改进,测试设备位置变动困难;车辆需要维持正常运营,车辆快速经过测试点时,由于测试设备测试范围有限且不能干扰车辆运行,信号的可视化难度较大。基于以上几点,采取仿真分析模拟[5-7]的办法,利用经过验证的模型,将实际测试投射到仿真模型的设置中,优化问题的解决过程。
3.1 无车状态环线场分布仿真
根据文献[8-9]和调研得到的数据,车体长度为15 m,宽度为3 m,使中低速磁悬浮列车悬浮所用的轨道由铝板、F型导轨和钢轨等金属材料构成。为进行电磁仿真,首先建立参数化的模型,模型初步建立如图2所示。在模型中,中低速磁悬浮列车的TWC环线的每个环长度为5 m,宽度为70 cm,线的直径为1 cm。材料设置为完全导电(Perfectly Electric Conducting,PEC)。激励源的设置中,port1为35.8 kHz的正弦信号,且大小为1 A的电流源,其位置在图2的左端;为了形成闭合回路,在图2的右端放置50 Ω的负载。

图2 TWC环线无车模型Fig.2 TWC loop model (without vehicle)
加入钢轨、F导轨和铝板后开展仿真,得到无车状态TWC环线的空间电场辐射情况,如图3所示。

图3 无车状态TWC环线空间电场辐射分布Fig.3 Space electric field radiation distribution of TWC loop (without vehicle)
根据仿真结果,得出空间电磁场分布规律,在无车时,即仅对TWC环线进行激励,空间电磁场在TWC环线的每个环中是相同的,在动态过程中,每个环中的电磁场均处于同步变化,大小相同,方向相同,符合TWC环线磁感应强度的变化规律。
3.2 有车状态环线场分布仿真
模型如图4所示,TWC环线的每个环的长度为5 m,宽度为70 cm,线直径为1 cm。环线、矩形板和钢轨的材料分别设置为铜、铝和铁。激励源的设置中,port2为54.5 kHz的正弦信号,且大小为2 A的电流源,其位置在左端且距离环线所在平面上方70 cm处。为了使环线形成闭合回路,对环线的两端均设置为50 Ω的负载。
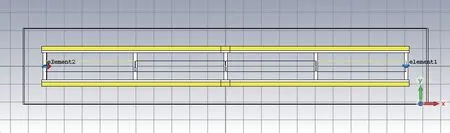
图4 TWC环线有车模型Fig.4 TWC loop model (with vehicle)
得到有车状态TWC环线的空间电场辐射情况,如图5所示。
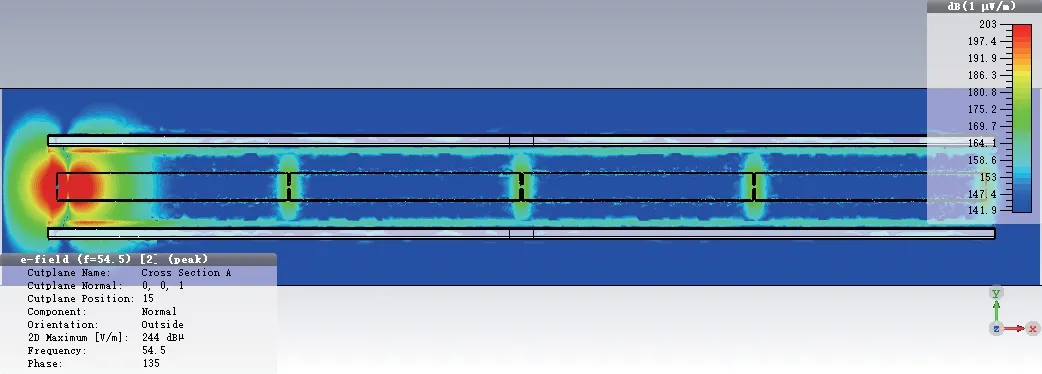
图5 有车状态TWC环线空间电场辐射分布Fig.5 Space electric field radiation distribution of TWC loop (with vehicle)
根据仿真结果,得出空间电磁场分布规律,在有车时,即在TWC环线的上方设置激励源,激励源位于第一个环的上方时,空间电磁场分布在第一个环中是不均匀的,在第二、三和四环中,分布是相同的。
3.3 仿真验证
以有车状态为例,将现场测试数据与模拟仿真结果进行对比分析,以此对仿真模型的正确性加以验证。当实际有车辆经过时,在轨旁的环线上布置电流探头,测得激励源在某一节环线起始位置的频谱如图6所示,电流值随激励源沿钢轨移动距离变化的数据如表1和图7所示。

图6 现场车辆正常运行且经过测试点频谱Fig.6 Spectrum diagram of field vehicle operating normally and passing through test point

表1 激励源不同位置对应的测试点电流值Tab. 1 Current values of test points corresponding to different positions of activation source
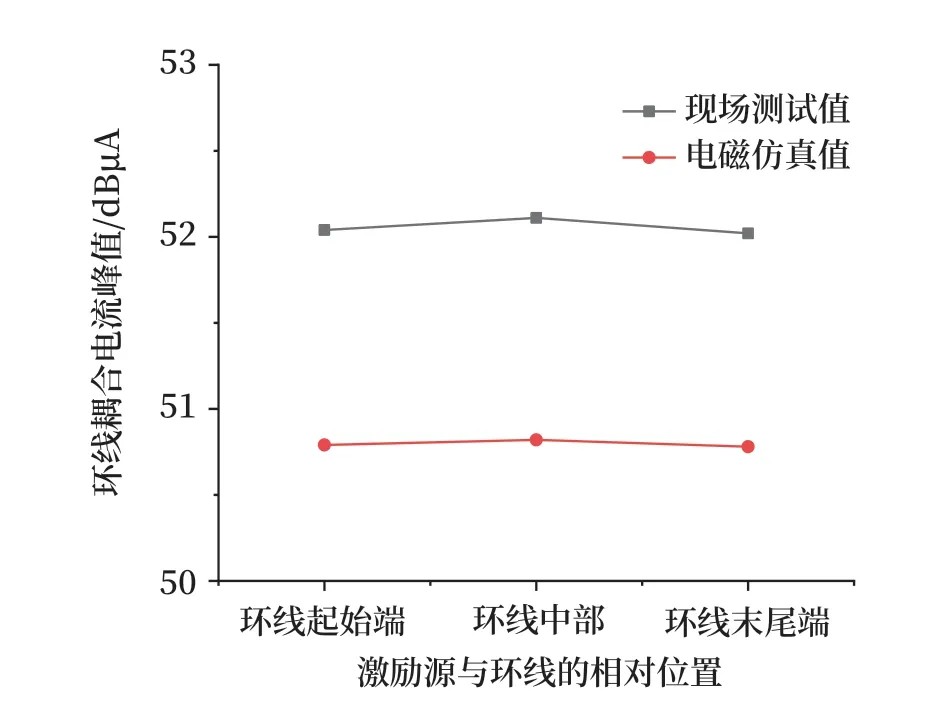
图7 激励源不同位置对应的测试点电流值Fig.7 Current values of test points corresponding to different positions of activation source
将现场采集数据的频谱与仿真数据的频谱在同一状态下进行对比,不同位置仿真与试验差值保持一致,两者只是在幅度上有差异,也是因为激励源的大小不同所致。验证了中低速磁悬浮列车的TWC环线模型的正确性和适用性,符合实际的应用情况。
4 结论
本文对基于交叉感应电缆环线通信的 TWC 系统进行三维电磁场仿真,对下行链路通信系统进行建模与计算,得到无车和有车状态下TWC环线的空间电磁场分布以及环线的电磁耦合机理,结合实际测试数据验证了计算结果,为TWC系统通信问题的后续研究与电磁防护提供了支撑。
