基于Faster R-CNN目标检测的滑坡隐患识别
——以福贡县城区为例*
2022-12-26简小婷左小清
简小婷,赵 康,左小清,朱 琪,朱 文
(1.昆明理工大学 国土资源工程学院,云南 昆明 650093;2.云南省基础地理信息中心,云南 昆明 650034)
0 引言
滑坡是在重力和其他外界条件作用下,斜坡上的部分土石体沿斜坡内部一个或几个滑动面整体向下滑动的自然现象。滑坡一旦发生,将会毁坏所涉区域的村镇农田,严重威胁当地居民的生命财产安全。2014年云南省福贡县“6·30”大型滑坡灾害造成1人死亡、15人失踪;2017年四川省“6·24”新磨村滑坡瞬间将整个村庄几乎掩埋,造成10人死亡、93人失踪;2019年贵州省水城县“7·23”特大山体滑坡灾害造成近1 600人受灾,43人死亡、9人失踪。国家统计局数据显示,2020年我国发生地质灾害7 840起,其中滑坡灾害4 810起,占比61.35%。因此,如何发现和有效识别滑坡灾害对于防灾减灾工作至关重要。
随着国产高分辨率卫星的普及,国产高分卫星影像在地质灾害领域得到了广泛应用。基于高分辨率光学遥感影像的滑坡隐患识别研究主要集中在对未成灾的不稳定滑坡和历史滑坡的整体或局部“复活”[1-3]。识别方法主要有以下4类:
a.人工目视解译方法。专业人员利用遥感影像上的色彩、纹理、阴影等几何特征辨别不同地物,再结合一些非遥感数据资料进行分析和推理,从而识别灾害隐患区域,准确度较高[4-5]。但是该方法非常依赖专业人员的知识和经验,耗时费力。
b.变化检测方法。该方法主要利用不同历史时间获取覆盖同一地表的遥感影像和相关地理数据,采用面向对象或利用像元特征识别滑坡引起变化的区域[6-8]。常用的方法有基于像元的滑坡信息提取和面向对象方法的滑坡信息提取[9]。基于像元的滑坡信息提取方法识别高分辨率光学遥感影像的滑坡时,会出现“同物异谱、异物同谱”现象,直接影响滑坡的识别和变化检测效果;而面向对象的滑坡识别方法能充分利用遥感影像的细节特征,有效避免“椒盐现象”。
c.机器学习方法。该方法通过提取所用数据的各类相关特征,使用各种分类器进行滑坡识别,自动化程度较高,但特征选择和超参数调试工作量较大,数据集较大时易出现错分漏发现象[10-12]。
d.深度学习方法。该方法无需人工构建和选择特征图层,适合于更大场景的滑坡识别,在滑坡识别中以卷积神经网络为主[13-17]。目前基于目标检测中的深度学习算法主要分为基于区域建议框的双阶段检测算法和基于回归运算的单阶段检测算法,前者主要的典型算法有R-CNN、SPP-net、Fast R-CNN、Faster R-CNN算法等,后者主要的典型算法有YOLO、YOLOv2、YOLOv3、SSD和RetinaNet算法等。单阶段检测算法具有很好的检测速度,但是检测精度不如双阶段算法;双阶段算法中的Faster R-CNN准确率较高,漏检率较低,速度比Fast R-CNN有所提升[18-19]。
在已有的目标检测滑坡识别研究中,研究对象多聚焦于地震滑坡和降雨滑坡等新生滑坡,而对发生时间久远、边界较不明显的滑坡研究较少。除此之外,滑坡识别研究中使用的光学影像数据中大多分辨率较低,会造成滑坡识别的遗漏。因此,本文基于高分辨率的光学遥感影像,以云南省怒江傈僳族自治州福贡县为研究区,构建高山峡谷地区滑坡识别数据集,并在该数据集的基础上,探索使用Faster R-CNN目标检测方法进行滑坡检测的可行性。
1 目标检测方法
1.1 基于Faster R-CNN的目标检测方法
近年来,目标检测方法逐渐被运用于各个领域,取得了丰硕的研究成果。但传统的目标检测方法复杂度较高,窗口冗余,而基于深度学习的目标检测和识别较好地解决了上述问题,已逐渐成为目标检测的主流方法。目前基于候选区域的深度学习目标检测算法有R-CNN、Fast R-CNN、Faster R-CNN,基于回归的深度学习目标检测算法有YOLO、SSD等。Fast R-CNN弥补了R-CNN的不足,而Faster R-CNN在Fast R-CNN的基础上进行了改进,明显提高了精度和速度。且Faster R-CNN与YOLO、SSD相比,鲁棒性更强,占用的空间更小。因此,本文采用Faster R-CNN目标检测方法来实现滑坡的自动识别。Faster R-CNN是2016年REN在R-CNN和Fast R-CNN的基础上提出的一种深度学习模型[23],将获取特征图层、候选区域选取、回归和分类等操作融合在一个深层网络中,提高了分析效率。Faster R-CNN滑坡检测流程如图1所示。

图1 Faster R-CNN滑坡检测流程
1)滑坡隐患特征提取
利用主干特征提取网络获得图片的共享特征层,常用的深度卷积网络结构有VGG16、ResNet、IncResV2等[24]。ResNet能增加网络的深度,从而对模型进行优化,可以获得更好的学习效果,因此本文采用ResNet101网络以便得到更深层次的融合特征图,从而提高目标检测性能。
2)RPN检测
区域建议网络(Region Proposal Network,RPN)解决了R-CNN、Fast R-CNN候选框生成计算开销大的问题,提高了目标检测算法性能。RPN主要通过神经网络处理,获取准确的候选区域,RPN网络采用多任务损失,式(1)是其对一张影像的损失函数定义式:
(1)

(2)
(3)
式中,参数R为smooth函数,表达式为
(4)
3)ROI Pooling
根据确定的滑坡精确位置,从特征图中选择用于分类的目标数据,利用Pooling修改图片尺寸,输入全连接层进行分类和回归。
4)分类和回归
利用Softmax函数获取最终分类,判断物体是滑坡还是非滑坡,以便精细调整候选区域位置,从而获取最终目标检测结果。
1.2 模型训练
1)模型训练平台
模型训练平台为台式计算机,处理器是Intel Corei9-9900k,32 GB内存,512 GB固态硬盘。在Anaconda中配置Pytorch 3.6和Tensorflow1.13.2。基于Pytorch和Tensorflow框架搭建了Faster R-CNN模型,模型选用ResNet-101(101层)为主干网络,最小批数量为2张图片,训练批次为100次。
2)模型训练数据集
本文使用的高分辨率光学遥感影像是2019年高分一号光学影像,整体影像质量良好。高分一号卫星是我国自主研发并成功发射的首颗高分辨率对地观测遥感卫星,其分辨率达到了2 m,能满足遥感影像精细解译要求。样本数据库利用ArcMap工具构建(见图2)。
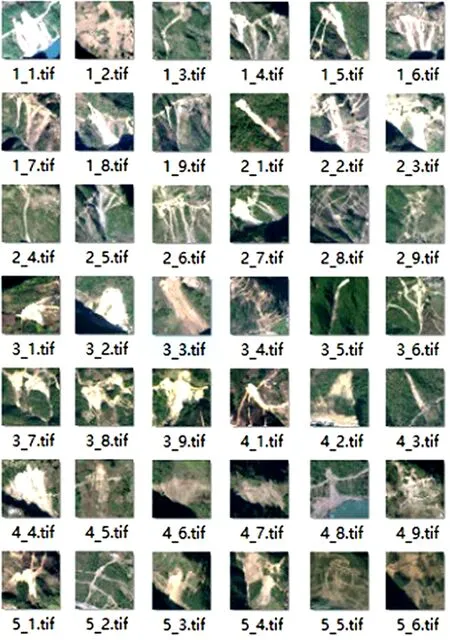
图2 滑坡样本集
另外,为进一步增大样本量,在训练时采用了旋转的数据增强策略。因此,一共解译出福贡县(不包含福贡县城区域)1 548处滑坡隐患区域,数据集统一为VOC2007格式,影像标准化为600×600像素,统一标记,确保标记不重叠。其中:1 338张滑坡影像数据集用于学习目标特征,训练目标检测算法;210张影像数据集作为测试样本集,用于选择表现最好的模型。
1.3 精度评价
本文采用精确度(Precision)和召回率(Recall)作为精度评定指标。精确度是正确预测结果数量与所有预测结果的比值,召回率是正确预测结果数量与所有真实值的比值。单独使用精确度或召回率指标评价目标预测精度会出现误测,故常将这两个指标结合使用。AP(Average Precision)值评价方法就是典型的Precision和Recall相结合的方法。AP值主要利用不同的Precision和Recall的点的组合画出曲线下的面积,能够更加准确地评价目标检测的准确度。
精确度P、召回率R、平均精度AP可分别表示为
(5)
(6)

(7)
式中,TP表示分类器认为是正样本且结果是正样本的例子,FP表示分类器认为是正样本但结果不是正样本的例子,FN表示分类器认为是负样本但结果不是负样本的例子。
滑坡检测结果如图3所示。在Faster R-CNN模型训练的100个批次中,选取损失值较小、精度较合适的第82个批次的模型参数作为最优模型用于结果测试,最终测试结果显示滑坡识别的AP值达到了92.42%。

图3 训练损失与精度验证
2 实验与分析
为进一步验证Faster R-CNN滑坡隐患识别模型的准确性,将遥感影像数据集输入AP值达92.42%的最优模型中,并采用面向对象滑坡隐患识别方法对福贡县城区域的高分一号影像进行滑坡隐患识别。将两种方法的识别结果与云南省地质灾害隐患识别中心提供的福贡县滑坡隐患点分布进行对比,以检验实验的准确度。
2.1 实验区
以福贡县城区为实验区,其位于福贡县中部,以福贡县政府为中心,面积约610 km2,涵盖鹿马登乡、上帕镇、架科底乡(见图4)。受印度板块与欧亚板块碰撞影响,深大断裂发育,近地表岩体破碎,地形起伏大,江河深切,局地暴雨多发,是典型的地质灾害高易发区[20-22],尤以滑坡灾害居多。同时,滑坡隐患源区往往地处高位,人迹罕至,具有高度的隐蔽性,仅靠地质灾害详查和群测群防手段难以及时发现灾险情。而高分辨率光学遥感影像覆盖范围广,对于变形迹象明显的滑坡隐患具有较好的识别能力,有助于大范围滑坡灾害隐患的快速识别。因此,本文借助高精度对地观测和人工智能手段,开展该区域滑坡灾害隐患识别,这对滇西北地质灾害防范具有重要的示范意义。

图4 实验区位置
2.2 实验设计
为了验证本文采用的目标检测方法的滑坡识别性能,基于福贡县城区的高分一号影像,分别采用面向对象方法和Faster R-CNN目标检测方法识别该区域的滑坡隐患[23-24]。所有实验均在处理器Intel(R)Core(TM)i7-10750H CPU@2.60GHz下进行。目标检测算法软件环境为Pytorch 3.6和Tensorflow1.13.2。面向对象方法在eCognition平台上展开,eCognition Deve-loper软件是一款基于面向对象的遥感信息提取专业软件,适用于高分辨率遥感图像。基于面向对象的遥感影像分类方法,能够有效避免“同物异谱”和“异物同谱”现象,从而更加准确地识别滑坡隐患。基本处理流程为:①遥感影像校正、裁剪等预处理;②利用多尺度分割方法(将形状因子和紧致度分别设为0.1和0.5,分割尺度参数设为75)分割遥感影像;③采用均值、灰度共生矩阵等特征因子定义和区分滑坡对象;④利用支持向量机(Support Vector Machines ,SVM)算法提取滑坡信息;⑤根据云南省地质灾害隐患识别中心提供的滑坡隐患数据对比两种方法的滑坡隐患识别结果,以验证本文采用的目标检测方法的有效性。
2.3 实验结果分析
采用Faster R-CNN滑坡隐患检测方法,使用高分一号影像数据,识别出福贡县城区滑坡隐患点193处(见图5a)。采用面向对象方法,最终识别出滑坡隐患区域245处(见图5b)。

图5 Faster R-CNN识别结果(a)和面向对象识别结果(b)
由图5可知,两种方法均识别出了研究区域的大部分滑坡隐患点,且这些点大多是重叠的。将两种方法的识别结果分别与云南省地质灾害隐患识别中心提供的滑坡隐患数据进行比较,结果分别见表1和图6。

表1 滑坡隐患识别结果验证
由表1可知:基于面向对象的滑坡隐患识别方法识别出245个滑坡隐患点,正确解译201个,正确率为82.04%;基于Faster R-CNN的滑坡隐患自动识别方法识别出193个滑坡隐患点,正确解译176个,正确率为91.19%。由此可见,基于Faster R-CNN的滑坡隐患识别方法准确度更高。
但两种方法都有部分识别错误和未识别区域。图7为Faster R-CNN部分滑坡错误识别结果,对错误识别结果进行对比后发现,多数错误识别结果位于地表光谱特征与滑坡边缘类似的梯田、草地或山脊交汇地带,这些地方的纹理特征复杂多变,植被稀少,地表较为裸露,易导致错误识别。图8为部分未识别出的滑坡隐患区域,对部分未识别出的滑坡隐患区域进行对比后发现,其主要有两种类型:一种是滑坡在光学遥感影像上光谱特征与周围环境相似,滑坡后壁可见,但边界比较模糊,易被识别为裸露的草地或耕地;另一种是滑坡主要位于光学遥感影像中的阴影部位,处于山脊或坡顶,在阳光照射下被阴影覆盖,无法通过光谱特征识别出滑坡隐患区域。
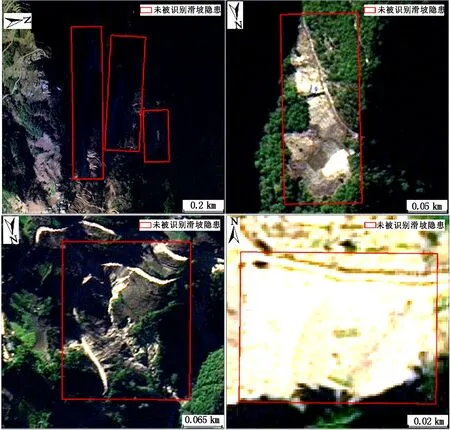
图7 部分滑坡错误识别结果

图8 未被识别出的滑坡隐患区域
3 结论
随着国产高分辨率卫星技术的快速发展,为地质灾害智能识别提供了可靠的高分辨数据。本文基于Faster R-CNN目标检测方法构建了滑坡隐患自动识别模型,采用高分一号影像数据,对福贡县城区域进行了滑坡隐患检测,共识别出隐患点193处,与云南省地质灾害隐患中心提供的数据进行比较后发现其准确率高达91.19%。本研究还得到了以下主要结论:
a.基于高分一号卫星影像,采用Faster R-CNN滑坡隐患识别方法能有效识别滇西怒江流域的滑坡隐患,可有效减少实地巡排查工作量,对地处高位、交通不便、隐蔽性强的滑坡隐患排查具有重要的指导意义。
b.Faster R-CNN滑坡隐患识别方法对地表特征明显的滑坡具有较高的识别率,但对形态不完整、变形迹象不明显的滑坡难以识别。因此,未来可考虑与InSAR、LiDAR技术相结合,采用综合研判的方法进一步提高滑坡隐患识别的准确率。
