双臂搬运机器人反应式导航控制系统设计
2022-12-26潘之腾李建梅臧汝静
孙 辉,高 剑,潘之腾,李建梅,臧汝静
(1.菏泽市科学技术信息研究所,山东 菏泽 274000;2.菏泽市产品检验检测研究院,山东 菏泽 274000)
0 引言
双臂搬运机器人的设计模仿了人体双臂协作原理,使其双侧臂关节同时具有运动能力,即可执行同步操作,也可处于不同的行为状态之中。在执行搬运任务时,由于双侧臂关节结构的运动能力并不受到明确约束,所以该类型机器人的作业半径相对较为广阔[1]。在搬运作业任务中,双臂机器人可以将货物转移至既定位置之处,且运动行为能力也不会受到所处位置的影响,故而其动力供应极易得到保障,这也是双臂搬运机器人受到各个施工单位广泛欢迎的主要原因[2]。现阶段双臂搬运机器人正朝着具有自组织、自适应能力的智能化方向发展,故而导航能力的高低成为了评价机器人应用能力的关键指标,特别是在任务过程中,如何在增强机器人避障准确性的同时,使其搬运能力得到保障,已经成为了一项亟待解决的难题。
导航技术的应用同时涉及位置定位与行进轨迹规划。对于双臂搬运机器人而言,位置节点定位能够帮助核心控制主机掌握机器人所处的实际运行位置[3];而行进轨迹规划则是核心控制主机的基础执行能力,对于不同机器人设备来说,由于其承担的作业任务不同,其所经历的行进轨迹也会有所不同。传统仿真控制系统利用PC传感器记录双臂搬运机器人的实际运行状态,再借助Linux平台对所得数据参量进行整合,最终经由传输通道,将这些信息文本反馈回核心控制主机[4]。然而此系统的实际控制能力有限,并不能使双臂搬运机器人在复杂路况环境中实现对障碍物设备的准确躲避。为解决上述问题,设计一种新型的双臂搬运机器人反应式导航控制系统,再根据对比实验结果,求证该系统的实用性能。
1 系统硬件单元设计
双臂搬运机器人反应式导航控制系统的硬件单元由单片机与电机电路、ARM微处理器、PIC单片机、反应式导航子模块四部分共同组成,本章节将针对各个应用设备展开研究。
1.1 单片机与电机电路
双臂搬运机器人反应式导航控制系统采用直流电机供应形式,将单片机电路置于+VCC端口与-VDD端口之间,能够在PWM元件的作用下,统一PB1、PB2、PB3、PB4节点的连接状态,使其在稳定输入电量信号的同时,将交流电量波段转换成直流传输形式,并可以借助多个负载电阻设备,将这些电量信号反馈至下级连接元件之中,单片机电力的完整连接结构如图1所示[5]。PWM元件左右两端接口同时负载PB节点与单片机端子设备,前者与+VCC端口相连,负责对电量传输信号进行聚合处理,后者分别与MOTOR电量元件和NPN5609设备相连,可在承接电量传输信号的同时,将负载电压与负载电流均匀分配给R1、R2与R3电阻。由于R级电阻的内阻数值不同,故而其所处连接位置与执行作用能力也有所不同[6]。
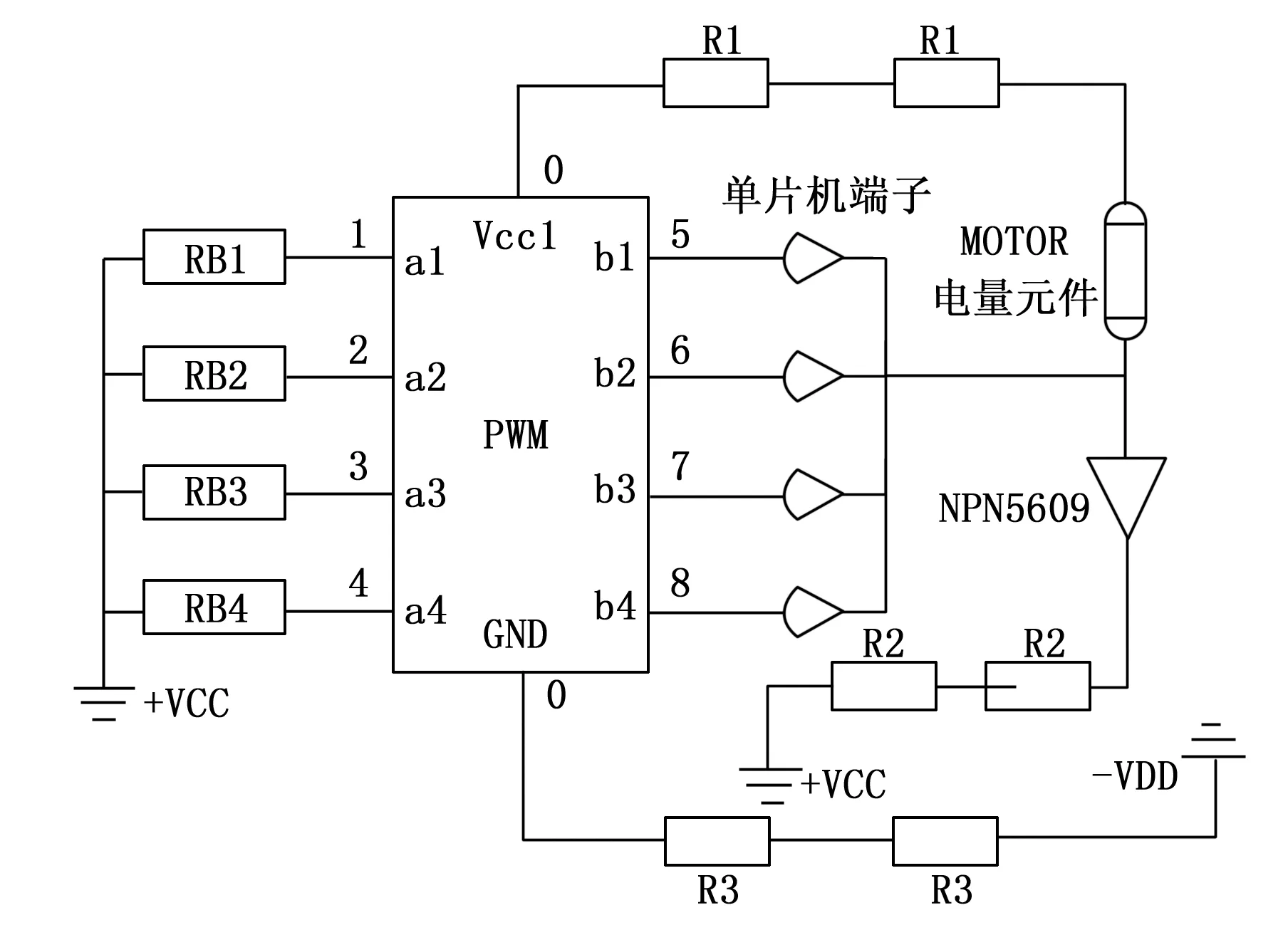
图1 单片机与电机电路的连接结构
MOTOR电量元件、NPN5609设备同属于单片机与电机电路中的核心应用结构,在实际应用过程中,两者共同调试双臂搬运机器人的行进运动状态,并可以根据障碍物节点的分布形式,更改机器人的实时反应行为。
1.2 ARM微处理器
ARM微处理器是32位的反应式导航行为处理元件,可以借助外部负载电源,对已获取的电量信号进行处理,并可以从中选取功耗标准与其他信号参量不同的电量特征值作为核心作用对象[7](双臂搬运机器人反应式导航控制系统的微处理器结构为ARM-7系列的应用元件,具体连接结构如图2所示)。对于双臂搬运机器人反应式导航控制系统而言,ARM微处理器以LPC22xx芯片作为核心应用元件,左侧与拓展接口、导航控制接口相连,能够深入机器人管控主机内部,获取其中存储的电信号参量及导航节点记录信息。当单片机复位电路保持连续闭合状态时,LPC22xx芯片对于存储信息参量的提取速率达到最大值状态,此时JTAG接口会自发断开,以此避免双臂搬运机器人出现过度反映的表现行为,使得控制主机的实时运行能力得到保障[8]。
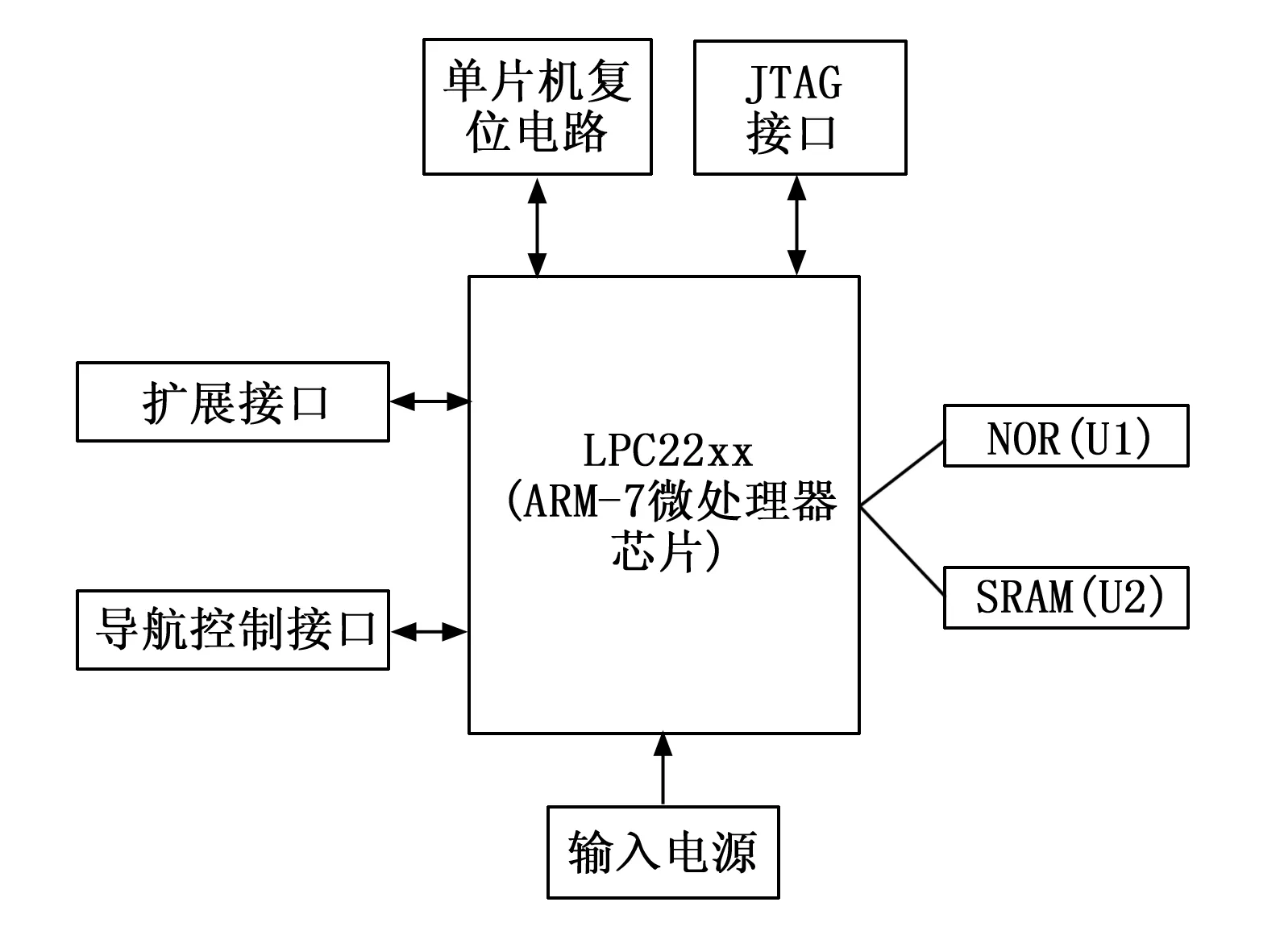
图2 ARM微处理器元件的结构简图
NOR接口(U1接口)、SRAM接口(U2接口)同属负载于LPC22xx芯片右侧,能够及时转存电源设备与单片机复位电路输出的电信号参量,并可以将其转换成可供导航控制接口与扩展接口直接调取的应用形式。
1.3 PIC单片机
在双臂搬运机器人反应式导航控制系统中,PIC单片机元件的连接行为遵循哈佛总线机制,由于外部负载接口数量较多,故其在执行寻址指令时,所需消耗的电量信号极少,能够使机器人结构始终保持相对稳定的运动行进状态。PIC16(L)F18857芯片作为PIC单片机的核心应用结构,外部同时负载MCLR、RA、VSS、VPP、RB、VDD等多种类型的接口组织[9]。其中,MCLR接口与RA0接口负载于同一连接位置处,负责将PIC单片机与主单片机电路连接起来;RA1-RA4接口负责将外部电量信号传输回PIC16(L)F18857芯片,与RB0-RB2接口的执行能力相反;VSS、VPP、VDD同属于功能性接口,可以确保PIC16(L)F18857芯片始终保持相对稳定的连接状态;ICSPCLK接口与导航控制主机相连,负责调节ARM微处理器的实时连接状态。完整的PIC单片机连接结构如图3所示。
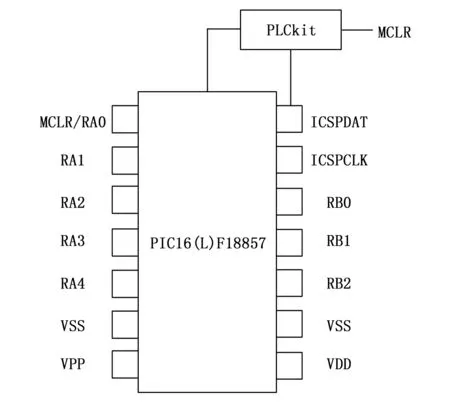
图3 PIC单片机连接结构
PLCkit结构作为PIC单片机的外部负载元件,可以在ICSPDAT接口的作用下,与PIC16(L)F18857芯片建立连接关系,当MCLR端口连续闭合时,主单片机电路可以直接更改双臂搬运机器人的运动行进状态,此时整个PIC单片机元件的连接形式始终保持稳定[10]。
1.4 反应式导航子模块
1.4.1 HN-9移动平台
HN-9移动平台决定了双臂搬运机器人的运动行进能力,由臂关节连接杆、感应器、导航节点、主挡板4个应用结构共同组成[11],其各个连接结构的作用能力如下(具体结构模型如图4所示)。
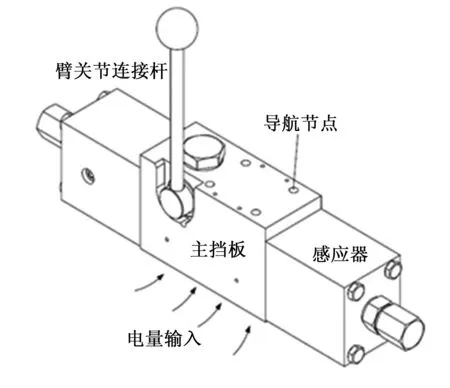
图4 HN-9移动平台示意图
臂关节连接杆:在双臂搬运机器人的反应式导航子模块中,臂关节连接杆位于HN-9移动平台的边缘区域,具有较强的可操控能力[12]。当连接杆连续向下运动时,表示双臂搬运机器人的运动行为较为频繁,整个HN-9移动平台所需承担的电信号总量也就相对较大;当连接杆连续向上运动时,表示双臂搬运机器人的运动行为存在偶然性,整个HN-9移动平台所需承担的电信号总量相对较少。
感应器:感应器连接在HN-9移动平台前侧,负责感知双臂搬运机器人的实际运动状态,并可以将所采集到的数据信息参量反馈回导航控制主机。
导航节点:负责记录双臂搬运机器人的位置信息。
主挡板:接收电量输入信号,并借助感应器元件,将这些电信号参量传输至臂关节连接杆设备之中。
1.4.2 智能导航平台
智能导航平台是具有信息记录能力的控制系统应用子模块,能够根据双臂搬运机器人所处位置节点的不同,对已获得信息参量进行排列处理,并可以将记录文本反馈给HN-9移动平台,使其所制定的控制执行指令更符合实际应用需求。假设双臂搬运机器人当前所处位置节点O0坐标为(X0,Y0,Z0),在反应式导航控制系统作用下,其运动后位置节点O1坐标为(X1,Y1,Z1),由于机器人设备不具备空间运动能力,所以节点O0、节点O1始终处于同一控制平面中[13-14]。由于智能导航平台的存在,由节点O0到节点O1的机器人运动行为能够得到有效控制。为避免机器人反应速度下降,在设置智能导航平台时,还应关注滤波控制器与HN-9移动平台之间的实时连接关系。当障碍物节点与机器人当前运动节点之间的物理间隔值相对较大时,滤波控制器的执行速率则会随之提升;而当障碍物节点与机器人当前运动节点之间的物理间隔值相对较小时,滤波控制器的执行速率则会不断下降,这种连续感应行为也是保障双臂搬运机器人在作业任务过程中能够进行精准避障的主要原因。
1.4.3 ROS操作平台
ROS操作平台负责管理双臂搬运机器人反应式导航控制系统中的执行进程指令,以Master节点管理器作为核心应用元件,可以联合下级Model节点,实现管控信息指令的相互传输,从而使得Client客户端、Server服务器能够同时控制导航任务的执行状态。具体操作界面如图5所示。
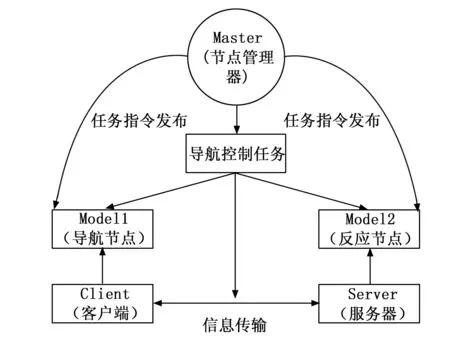
图5 ROS操作平台主界面
在运行过程中,Master节点管理器可以同时协调Model1导航节点与Model2反应节点,前者负责记录双臂搬运机器人的过往运动数据,后者负责监测机器人的实时运动状态,由于导航控制任务不具备双向传输的能力,所以在Master节点管理器元件的作用下,Model1导航节点、Model2反应节点具有相同的连接等级[15]。Client客户端作为底层执行设备,可以直接控制Model1导航节点,随着双臂搬运机器人反应速率的不断加快,导航控制任务的输出量也在持续增大,为保障机器人设备对于外部障碍物的精准避让能力,客户端元件还必须具备一定的数据处理与数据存储能力[16]。Server服务器可以直接控制Model2反应节点,两者共同维护导航控制任务的传输稳定性,并可以将已发布任务指令改写成可供系统控制主机直接调用的形式。
2 双臂搬运机器人的协调控制
在各级硬件应用结构的支持下,按照绝对位姿向量求解、相对位姿向量求解、速度雅可比计算、动力学递推表达式建立的处理流程,完成双臂搬运机器人反应式导航控制系统的设计。
2.1 绝对位姿向量
绝对位姿向量是指在搬运任务过程中,由机器人臂关节初始运动节点指向终止运动节点的位移向量,该项指标参量的计算取值越大,就表示机器人双臂结构所能承担的搬运任务量越大。就反应式导航控制系统而言,由于负责记录节点位移的设备主机并不能直接与机器人运动轨迹路径相接触,所以绝对位姿向量指标的计算结果也总是具有一定的物理偏差[17-18]。设δ表示双臂搬运机器人机械臂末端的运动速度向量,且该向量指标的取值受到ROS操作平台反应时长ΔT的直接影响。当机器人臂关节由初始位置χ0运动至终止位置χn时,联立上述物理量,可将双臂搬运机器人反应式导航控制系统所承担的绝对位姿向量表达式定义为:
(1)
式中,w0表示初始运动位置处的臂关节弯曲度系数,wn表示终止位置处的臂关节弯曲度系数。为有效控制绝对位姿向量计算数值的误差度水平,在对w0系数、wn系数进行赋值时,要求其实际取值必须处于[1,e)的物理区间,且两个指标参量不能同时等于极大值与极小值赋值结果。
2.2 相对位姿向量

(2)
式中,E0表示相对节点ε0处的机器人臂关节行为特征,En表示相对节点εn处的机器人臂关节行为特征。在设计双臂搬运机器人反应式导航控制系统时,要求绝对位姿向量、相对位姿向量之间必须具有明显的数值差。
2.3 速度雅可比
速度雅可比既可以描述搬运机器人双臂关节结构与其运动位姿之间的线性映射关系,也可以体现出臂关节运动空间与臂关节协调空间之间的力学传递关系。对于双臂搬运机器人反应式导航控制系统而言,速度雅可比指标体现出了微分思想的最优线性逼近原则,可以在区分绝对位姿向量、相对位姿向量差异性的同时,将臂关节结构所承载的力学作用控制在既定数值水平之内。设a1、a2表示两个随机选取的双臂搬运机器人运动位姿控制系数,在运算过程中,上述两个指标参量的取值结果始终不相等。
速度雅可比计算表达式为:
(3)

2.4 动力学递推

双臂搬运机器人反应式导航控制系统的动力学递推表达式定义为:
(4)
以动力学递推表达式作为约束条件,在求取速度雅可比指标的同时,确定绝对位姿向量、相对位姿向量之间的关联程度,并联合相关硬件设备结构,实现双臂搬运机器人反应式导航控制系统的顺利应用。
3 实验结果与分析
选择两台外观一致的全新SYB1510A型双臂搬运机器人作为实验对象,分别利用反应式导航控制系统、传统仿真控制系统对所选机器人的运动行为进行调控,其中前者作为本文系统、后者作为文献[3]系统、文献[4]系统。为保证实验结果的公平性,除所选取控制方法不同外,本文系统、文献[3]系统、文献[4]系统其他实验条件均保持一致,具体实验参数配置情况见表1。
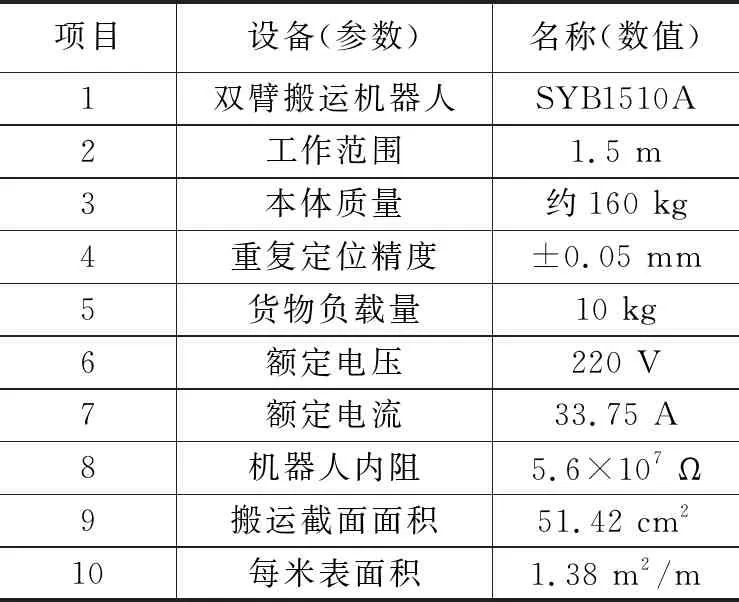
表1 实验参数准备
双臂搬运机器人在作业任务过程中的行进避障准确性(ζ)的计算表达式如下:
(5)

行进避障准确性(ζ)可以反映出系统主机对于机器人运动行为的控制能力。ζ指标的计算数值越大,系统主机对于机器人运动行为的连续控制能力也就越强。对本文系统、文献[3]系统、文献[4]系统双臂搬运机器人在作业任务过程中的行进避障准确性(ζ)进行计算,具体计算数值如表2。
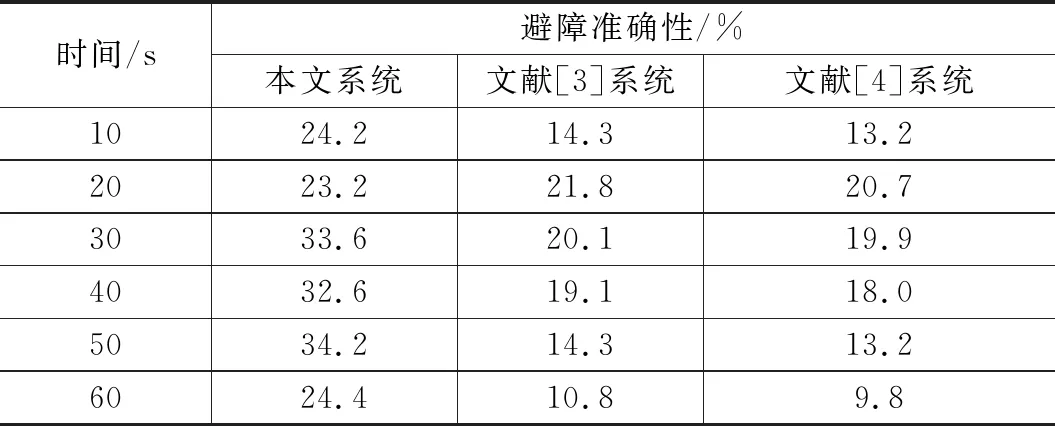
表2 避障准确性对比结果(ζ)
分析表2可知,当实验时间等于50 s时,本文系统ζ指标达到最大值34.2%;当实验时间等于20 s时,文献[3]系统ζ指标达到最大值21.8%,文献[4]系统ζ指标达到最大值20.7%,与本文系统最大值相比,分别下降了12.4%和13.5%。整个实验过程中,本文系统ζ指标均值为28.7%,文献[3]系统ζ指标均值为16.7%,文献[4]系统ζ指标达到最大值15.8%,明显低于本文系统ζ指标均值水平。
为了进一步测试本文系统的应用效果,以所设计的双臂搬运机器人为例,测试机器人的各种参数,对该实验对象采用机器人实行导航控制,选用的机器人在满电情况下能够行驶10 km,行驶路线的平面结构如图6所示。
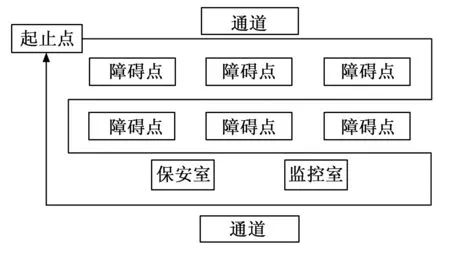
图6 行驶路线结构图
该线路东西长度为400 m,南北长度300 m,其周围包含多个障碍点、保安室以及监控室等。为直观体现本文系统的反应式导航控制效果,采用本文系统对图6实际行驶路线导航控制,获取本文系统配准后的反应式导航控制轨迹与期望轨迹的吻合程度,得到具体结果如图7所示。
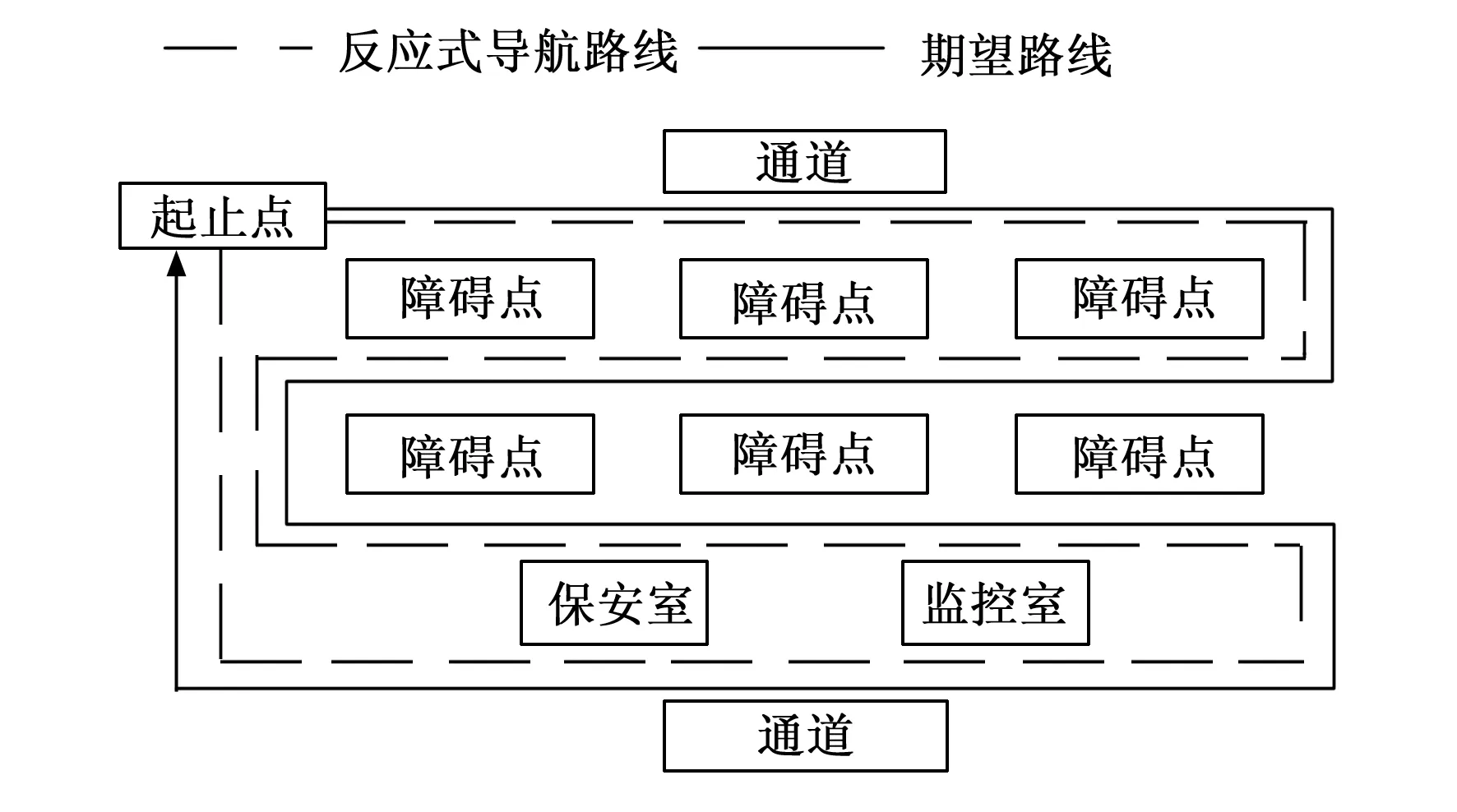
图7 反应式导航控制轨迹结果
由图7可知,经过本文系统反应式导航控制后的路线与期望路线吻合程度较高,双臂搬运机器人能够按照设定轨迹完成反应式导航,保证导航控制的有效性,达到了预期目的。
综上可知,本次实验结论为:
1)利用反应式导航控制系统所得节点间隔距离与搬运速度指标的数值水平较高,在搬运货物质量保持不变的情况下,可以有效增大双臂搬运机器人在作业任务过程中的行进避障准确性,对于系统主机而言,其对于机器人运动行为的连续控制能力能够得到一定程度的促进。
2)本文系统下导航线路与期望路线基本相符,吻合程度较高,具有较好的效果。
4 结束语
与传统仿真控制系统相比,反应式导航控制系统重新规划了单片机与电机电路的连接形式,借助ARM微处理器、PIC单片机等结构,对反应式导航子模块的作用能力进行调试。在作业任务过程中,由于HN-9移动平台、智能导航平台、ROS操作平台三类硬件应用结构的存在,双臂搬运机器人绝对位姿向量、相对位姿向量之间的误差值水平得到保障,不但可以实现对速度雅可比指标的准确求解,还能够得到完整的动力学递推表达式。在实际应用方面,反应式导航控制系统不但增大了障碍物节点与机器人行进节点之间的间隔距离,还使得机器人双臂关节结构的搬运速度得到一定程度的提升,这对于增大行进避障准确性指标的数值水平确实起到了明显的促进性影响作用。对于系统主机元件来说,行进避障准确性数值的增大,可以实现对机器人运动行为的准确控制,这在实际应用方面具有较强的可行性价值。
