基于GPS与编码器测速的小麦变量播种系统设计与实验
2022-12-26山东理工大学农业工程与食品科学学院李永岗梁现民安兴成张祥彩
山东理工大学农业工程与食品科学学院 李永岗 梁现民 安兴成 张祥彩
前言
播种在小麦种植生产的过程中起着重要作用,其作业质量会影响小麦的生长情况,进而会影响小麦的产量[1]。传统的机械式小麦播种机在播种作业时,一般都是地轮或链条为排种器提供动力,当小麦播种机作业速度较高时,容易出现链条跳动、地轮打滑等问题进而造成漏播少播现象,播种质量得不到有效的保障[2]。而且当拖拉机刚起步工作或者快到地头时,播种作业速度都会明显比正常作业速度慢很多,此时如果仅用GPS或者编码器测速都无法真正保证播种的均匀性。近年来,国内外众多相关学者针对这些问题进行了研究。HE[3]提出了采用电机驱动排种器,采用编码器测速、并加入滑移率参数进行速度修正的驱动方案,提高了播种质量。印祥[4]研制了一种光电编码器测速的玉米播种机控制系统,使播种量与播种机作业速度实时匹配。刘婉茹[5]在播种机的车轮上增加了测速码盘,也有效提高了播种质量。
由于GPS在拖拉机低速工作时,测速精度会比较低,而编码器在高速时,误差又会比较大,针对以上现状,本文设计了一种基于GPS与编码器测速的小麦变量播种控制系统,在人机交互页面设置好播种作业参数,GPS与编码器采集播种机的作业速度,将采集的作业速度信号传递给主控制器,从而实时调整排种轴电机的转速,实现精量播种的目的。
1 总体结构及工作原理
1.1 移动式小麦播种平台
移动式小麦播种平台主要由行走系统和信息采集系统两部分组成,行走系统主要包括机架、主动轮、全向轮、直流有刷电机、直流有刷电机驱动模块、蓝牙模块、手机终端等,信息采集系统包括人机交互界面、GPS模块、光电编码器、直流无刷电机、直流无刷电机驱动器、HX711称重模块、arduino单片机等。
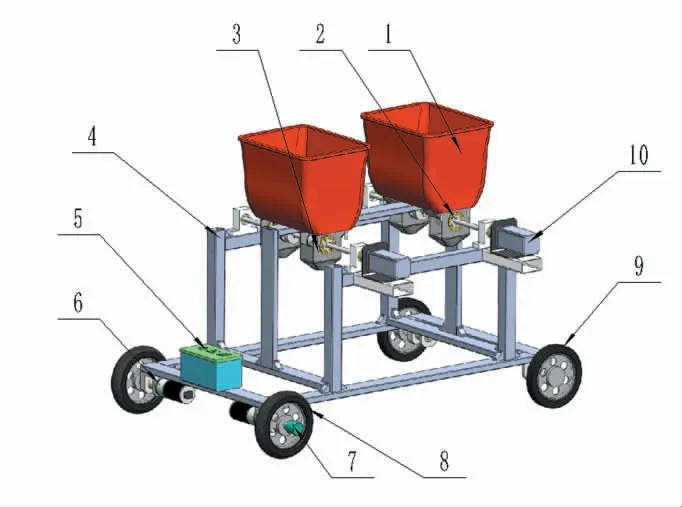
图1 移动式小麦播种平台结构图
移动式小麦播种平台外形参数为1200mm×600mm×550mm,驱动机构功率为200W,工作电压24V,电源由一块24V锂电池供给。
1.2 工作原理
当播种平台开始工作时,需要提前考察作业大棚的实际路面情况,首先在人机交互页面设置好播种作业参数,设置完成后,操作人员在Android终端的交互界面上输入参数指令,指令通过蓝牙通讯传输到Arduino单片机,单片机对数据进行解析处理,向直流有刷电机驱动器输出PWM信号,通过改变PWM控制信号的占空比或脉冲频率来控制直流有刷电机的转速,从而达到控制播种平台运动状态的目的。其次由安装在播种平台上的GPS模块和光电编码器采集机器的行进速度,将采集出的速度与设定速度相比,然后将比较之后的速度传递给主控制器,主控制器将传来的速度信息解析出来并将速度信号传递给电机驱动器,从而能够实时调整排种轴驱动电机的转速,使其能够在不同的播种作业速度下,都能保证播种平台播种的均匀性,从而实现精量播种的目的。光电编码器通过脉冲计数来计算车轮转过的圈数从而计算播种平台的行驶距离,然后再乘以播种平台的作业幅宽,来求得作业面积。
2 精量播种平台控制系统硬件选择及软件设计
2.1 硬件选择
当播量平台行进速度较低时,使用的是上海欧姆龙公司生产的光电式编码器来采集播量平台的前进速度,这是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是应用最多的传感器,光电编码器由光源、光码盘和光敏元件组成。光栅盘是在一定直径的圆板上等分地开通若干个长方形孔。由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速。
排种器的驱动电机使用的广东东莞一能机电公司生产的57BLF180-24S型号的直流无刷电机,该型号的电机体积较小,安装在播量平台上比较方便,而且起步扭矩高、抖动小、稳定性强、运转顺畅。控制系统硬件组成如图2所示。
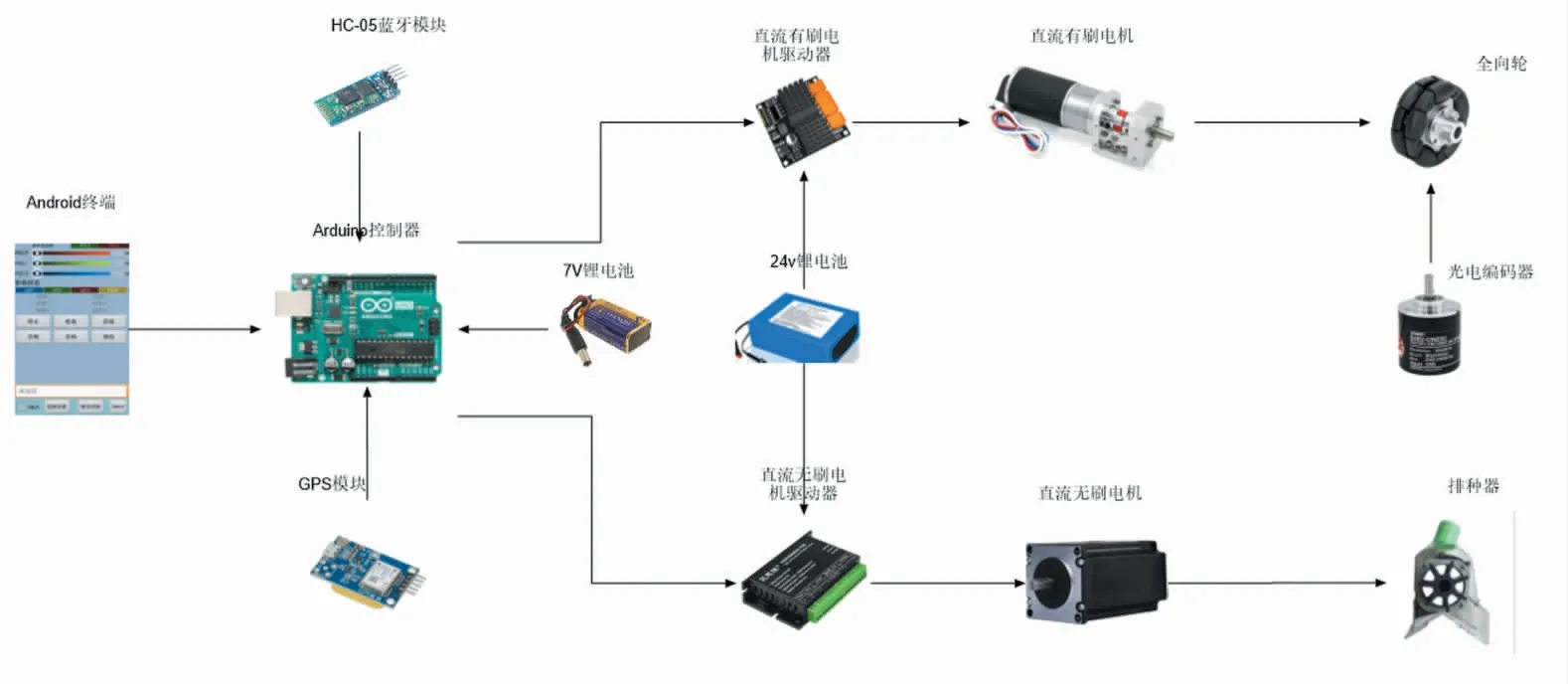
图2 控制系统硬件组成
2.2 软件设计
软件控制系统在Arduino IDE平台上进行研发,当程序开始运行时,首先检测机器能否正常工作,然后在人机交互界面设置好播种作业参数,软件控制流程图如图3所示。
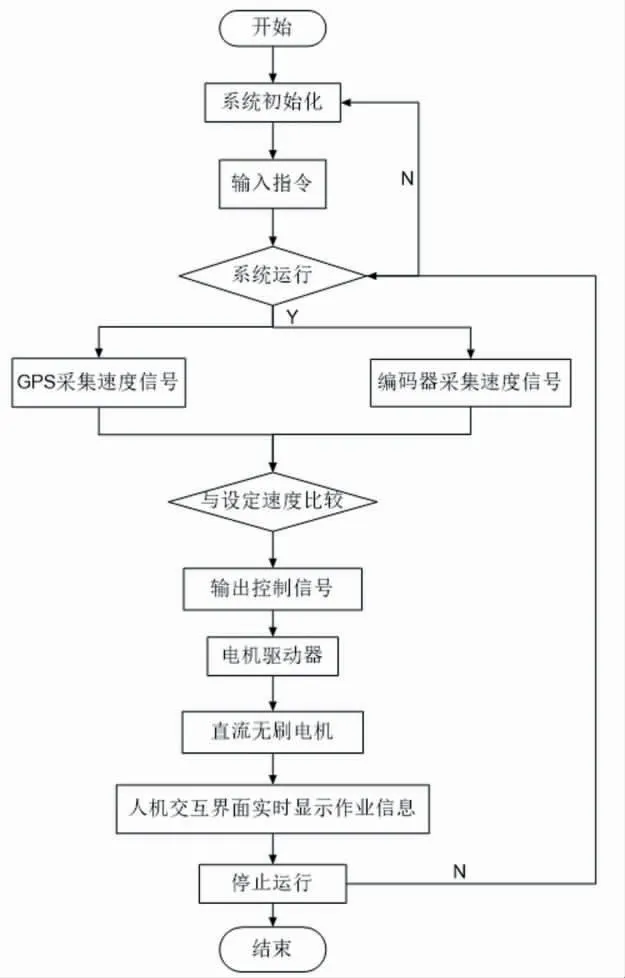
图3 主控端整体流程图
系统正式运行后,GPS与光电式编码器采集机器的前进速度,与设定好的速度进行比较,然后将速度信号传递给主控制器,主控制器将速度信号解析出来并传递给电机驱动器,从而实时控制电机的转速以达到精量播种的目的。为了能够精确地控制播种量,当设置好播种平台的播种作业参数时,需要依据作业平台的速度快慢对排种轴驱动电机的转速进行实时调整。
2.3 人机交互终端设计
为了方便操作该系统与机器实时状态的显示,本研究使用淘晶驰串口屏作为人机交互的显示终端,串口屏与主控制器进行通信。当播种平台开始工作时,串口屏能够实时显示当前作业地理位置信息、作业速度、行驶距离、作业面积以及种箱内种子剩余量。其中作业速度、行驶距离、作业面积都是通过光电编码器计算测得。在行驶过程中,光电编码器累计产生的脉冲数除以编码器转一圈产生的脉冲数就是车轮转过的圈数,再乘以车轮的周长就是行驶距离,行驶距离乘以播种平台的作业幅宽即是作业面积,行驶距离除以编码器检测周期为播种平台的实时作业速度。即
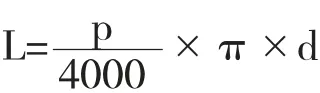
式中,p——编码器产生的脉冲总数
L——行驶距离,m;
π——圆周率
d——车轮直径,m;
播种平台作业速度为:

式中,st——编码器检测周期,s;
式中,l——播种平台的作业幅宽。
采用淘晶驰串口屏的开发环境,完成了基本参数设置界面和作业参数实时显示界面的设计和制作,操作界面如下图4所示。
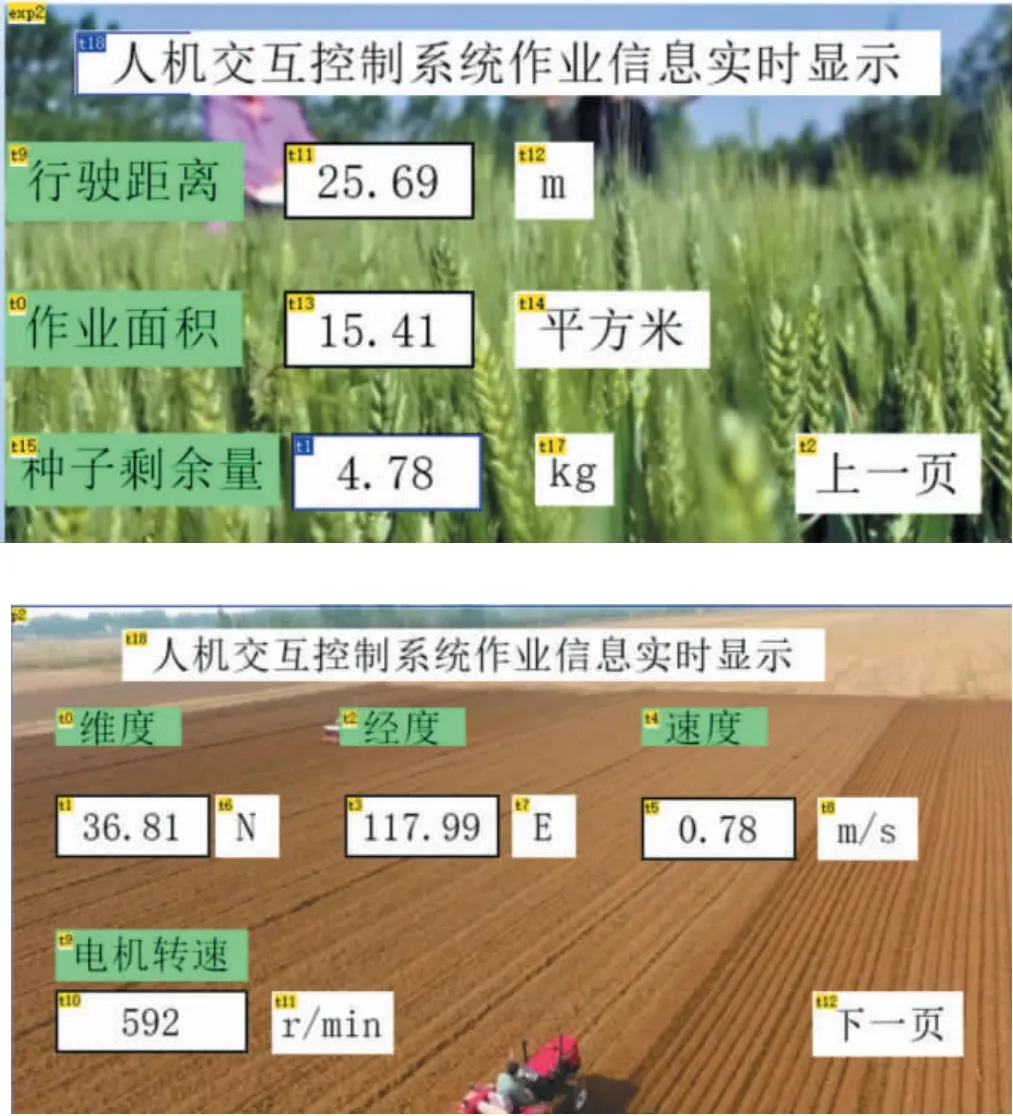
图4 HMI操作界面
3 测试实验与数据分析
3.1 室内实验
为了检测该操作系统的实际作业情况,对GPS测速和光电式编码器测速两种作业方式进行实验对比,在同一个播种平台的两个播种作业单体上分别装载GPS与光电式编码器两种系统,两者除控制方式不同之外,其他的都保持一样。将播种平台的行进速度作为实验因素,由于1m范围之内小麦数量多且不便直接观察,采用收集称算小麦种子总质量的方式对比精量播种机播种效果。为保证试验结果更加准确,分别在1、3、5、7、9km/h的5种作业速度与作业行数为5行的条件下进行GPS与编码器的对比试验,每行取平均值,再对播种均匀度变异系数进行对比,挖取长度为1m范围内的小麦种子,称算种子质量为mi(g),算出平均播种质量m(g),标准差记为Sd,播种均匀度变异系数为Cv,则


图5 室内试验
GPS测速和光电式编码器测速的小麦精量播种对比试验如表1、2所示。
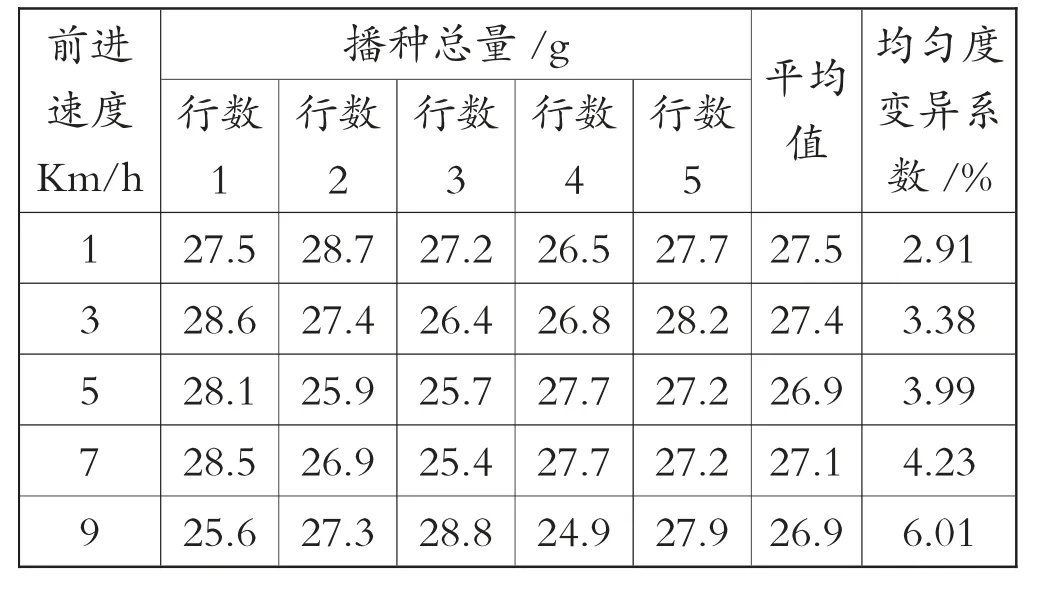
表1 GPS测速试验结果
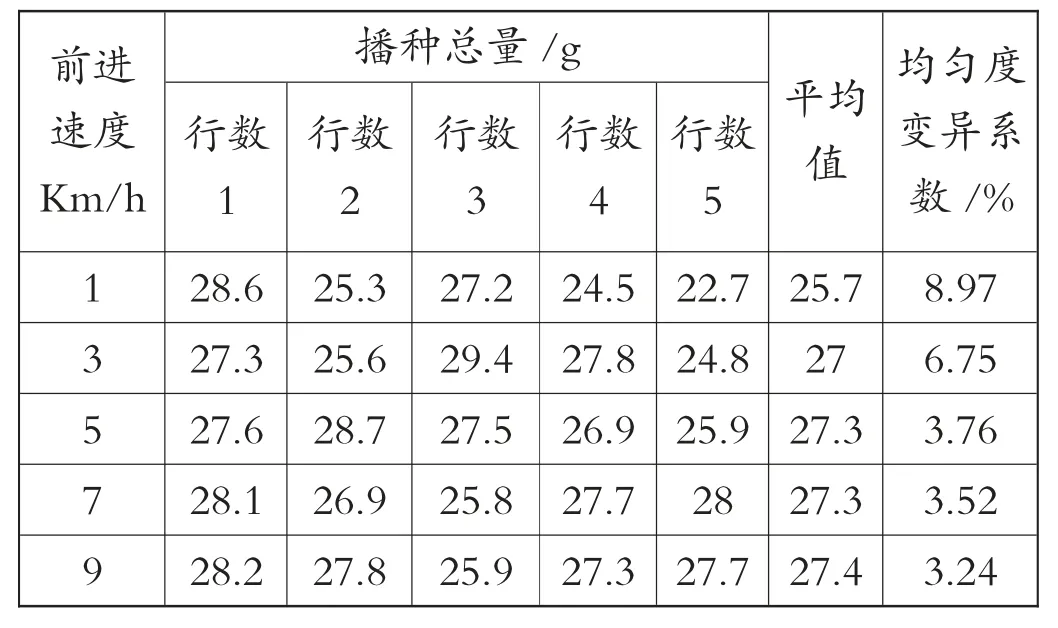
表2 编码器测速试验结果
3.2 数据分析
将播种平台的作业速度与播种均匀度变异系数作为评价该控制系统的指标,两种控制方式的作业速度与播种均匀度变异系数变化趋势如上表所示,可以看出播种平台在不同工作方式下的播种量相对均匀,系统性能比较稳定,当播种平台行进速度小于5km/h时,光电式编码器测速方式的播种均匀度变异系数要小于GPS测速方式,当其运行速度高于7km/h时,GPS测速方式的播种均匀度变异系数要小于光电式编码器测速方式。
4 结论
(1)研发了以GPS与编码器测速的小麦智能播种控制系统,该控制系统能够依据播种平台的行进速度实时控制排种轴驱动电机的转速,作业信息在人机交互界面上实时显示,可实现精量播种的效果。
(2)通过5种作业速度与作业行数为5行的条件下进行的对比试验,可以明显地看出,当播种平台以1km/h的速度作业时,编码器的播种均匀度变异系数要比GPS测速时高6.06个百分点,而当播种平台前进速度提高时,达到9km/h,GPS测速时的播种均匀度系数比编码器测速高2.77个百分点。说明GPS测速更适合在高速作业状态下工作,而光电式编码器测速则在低速作业状态下作业效果更好。
