基于部分耦合模型的干扰抑制分散控制器设计
2022-12-23杜星瀚
蔡 鋈 沈 鹏 杜星瀚
(1.广州番禺职业技术学院,广东 广州 511483;2.江苏师范大学,江苏 徐州 221116)
0 引言
干扰广泛存在于过程工业并会对系统的控制性能产生不利影响,导致系统无法完成期望的控制目标,产品质量下降[1]。不同于简单的单变量系统,大部分的工业过程控制系统都具有多个输入和多个输出,回路间存在着复杂的耦合作用,并且由于物料、能量和信号的传输不可避免地存在延时,这类系统普遍含有时滞,这些特性都对控制系统的干扰抑制造成了阻碍[2]。
目前,时滞多变量系统的控制方法按照对耦合的不同处理大致可分为分散控制、(完全)解耦控制和部分解耦控制。其中,分散控制具有对角型控制器,结构简单、易于设计和实现,但并未对耦合进行任何处理;解耦和部分解耦控制则是通过引入额外的解耦器或设计具有解耦功能的集中控制器,对回路间的耦合进行去除或部分保留,这类方法相对复杂,且大多以改善系统的跟踪性能为目标。鉴于此,在实际的工业现场中,结构简单的分散控制目前仍被广泛应用,并且很多先进控制策略的底层实现也仍依赖于这种传统的控制结构。
为了在不改变控制系统原有硬件结构的基础上进一步提高系统的干扰抑制能力,本文针对时滞多变量系统,提出了一种基于部分耦合模型的干扰抑制分散控制器设计方法。通过有选择地将部分耦合动态包含在被控对象模型中,实现了在不增加控制系统设计复杂度的情况下改善系统抗扰性能的目的,为提高实际过程工业的生产效益、保证产品质量、降低能耗提供了新的思路,具有重要的现实意义。
1 干扰分析指标
1.1 内模控制结构
传统反馈控制具有结构简单、易于实现的特点,目前仍广泛应用于工业现场。图1为传统反馈控制系统结构图,图中Gp(s)为被控对象;C(s)为反馈控制器;L(s)为干扰向量;r、u、y、d、d0分别为设定值、操纵变量、系统输出、干扰和归一化干扰。
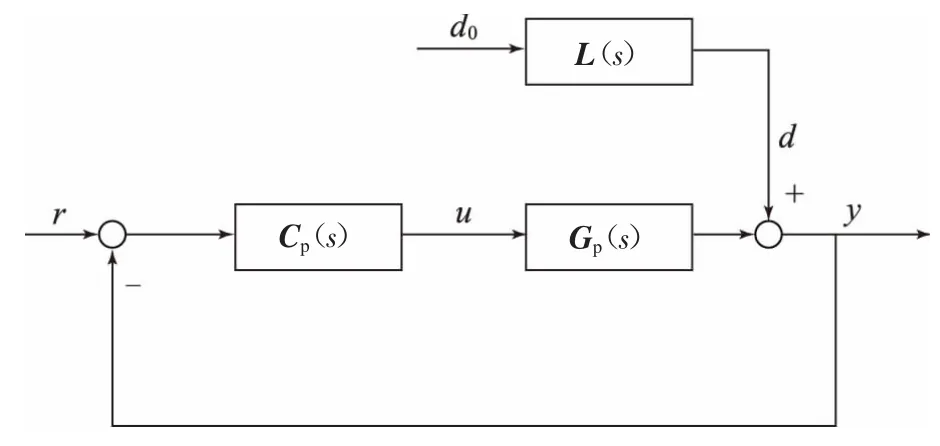
图1 传统反馈控制系统结构
在此控制框架下很难直接分析耦合与系统干扰抑制性能之间的关系,为此,本文借助内模控制框架来展开分析,如图2所示[3],图中Gm(s)和CIMC(s)分别为内模控制的内部模型和控制器。
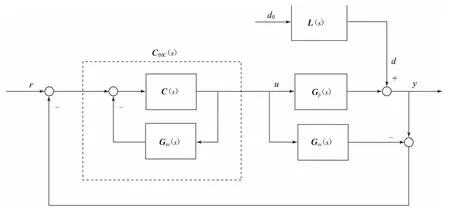
图2 等效的内模控制系统结构
通过分析虚线框中的输入、输出关系,不难得出内模控制器与反馈控制器之间的等价关系,如式(1)(2)所示。在之后的推导中,为简化表达,将在不引起歧义的情况下省略拉普拉斯算子“(s)”。

式中:I为具有相应维度的单位矩阵。
1.2 广义相对干扰增益
根据图2,干扰单独作用时的系统输出响应为:

其中,(I-GmCIMC)项被视为积分作用,在讨论干扰对输出的影响时暂时将其忽略。
考虑到不同的模型结构对应着对耦合的不同处理,可以根据模型的结构特点来展开分析。在完美内模控制器(CIMC=Gm-1)下,讨论以下两种情况:
(1)有相互作用,即Gm≠Gp时,根据式(3),干扰对输出的影响(L*)可表示为:

(2)无相互作用,即Gm=Gp时,代入式(4)可得:

基于式(4)(5),广义相对干扰增益(Generalized Relative Disturbance Gain,GRDG)被定义为:“存在耦合时干扰对输出的影响”与“完全解耦时干扰对输出的影响”之比[4],其具体表达式如式(6)所示。

式中:βi为GRDG的第i个元素;n为GRDG的维数;符号⊙表示向量的对应元素相除。
根据上述定义,GRDG反映了不同耦合情况下,干扰对系统输出的影响程度。因此,GRDG指标值可被用于分析不同耦合情况(或不同Gm结构)下系统的干扰抑制性能。
(1)若|βi|>1,说明回路i在不受其他回路影响时能获得更好的干扰抑制效果,即此时应对回路i进行解耦;
(2)若|βi|<1,则说明存在耦合时的干扰抑制效果更好,此时应保留耦合。
以一个四室暖通空调(HVAC)系统为例,如式(7)所示,运用上述GRDG指标进行分析。
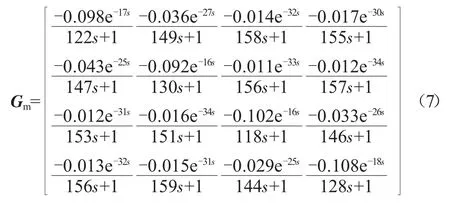
假设该系统受到的干扰为D=[-1 0.5 0.6 0.8]T,d0=1/s。基于式(6),可求得不同模型结构下的GRDG指标值,如表1所示。
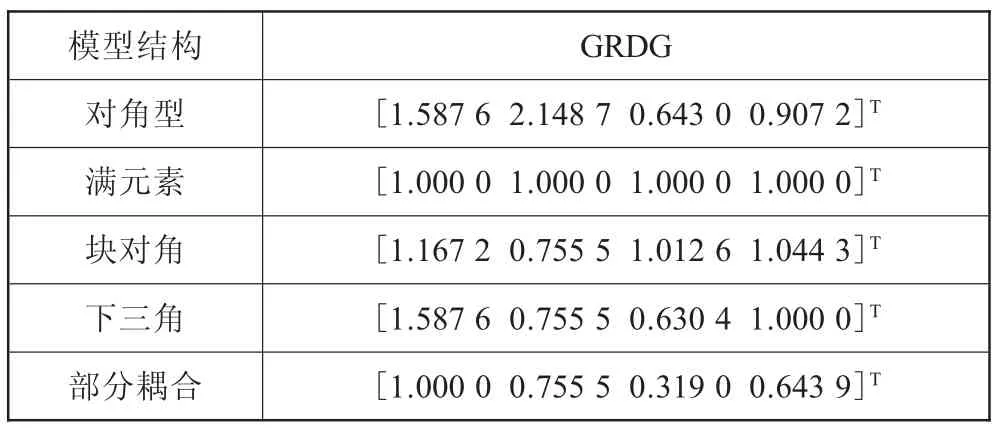
表1 不同HVAC模型(Gm)结构下的GRDG指标值
显然,部分耦合的Gm取得了最小的GRDG指标值,这也就意味着此时的控制系统获得了更优的干扰抑制性能。
2 部分耦合模型
从干扰抑制的角度出发,根据表1的结果,应选取含有部分耦合的被控对象模型结构为:
式中:gij(i,j=1,2,3,4)为过程模型Gm第i行第j列的元素。
观察式(8)可知,此时的Gpc具有对角型和满元素型之间的一般化结构,直接对其进行控制器设计较为复杂。为此,这里基于有效开环传递函数,对上述部分耦合模型进行对角近似,而后即可基于此近似的对角模型来直接设计分散控制器。
2.1 有效开环传递函数
有效开环传递函数(Effective Open-loop Transfer Function,EOTF)被定义为:反馈控制框架下(图1),本回路开环而其他回路闭合时,本回路输入/输出间的等效传递函数[5]。将式(8)的Gpc作为新的被控对象,替换图1中的Gp,推导此时各回路的EOTF。根据输入/输出关系,有:
式中:gii为回路i的主通道模型;Gpc,-ii为Gpc去掉第i行和第i列后得到的矩阵;Gpc,*i和Gpc,i*分别为Gpc的第i列和第i行去掉gii后得到的列向量和行向量;yi和ui分别为回路i的输出和输入;y-i和u-i分别为y和u去掉第i个元素后得到的向量。
经推导计算,得到回路i的有效开环传递函数为:

结合式(8)(10),可求得各回路的EOTF如式(11)所示。
2.2 模型近似
上述得到的EOTF模型通常较为复杂,难以直接用于控制器设计,为此,这里采用麦克劳林(Maclaurin)展开式来进行模型近似和化简,具体步骤如下:
步骤一,对式(11)中的EOTF进行Maclaurin展开,系数aii、bii和cii分别为:
步骤二,若将其近似为一阶加时滞(FOPTD)模型,则同样对此FOPTD模型进行Maclaurin展开,得到:
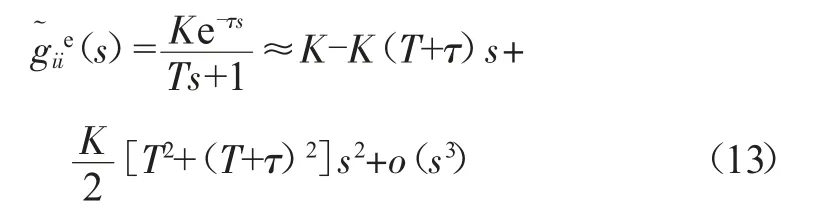
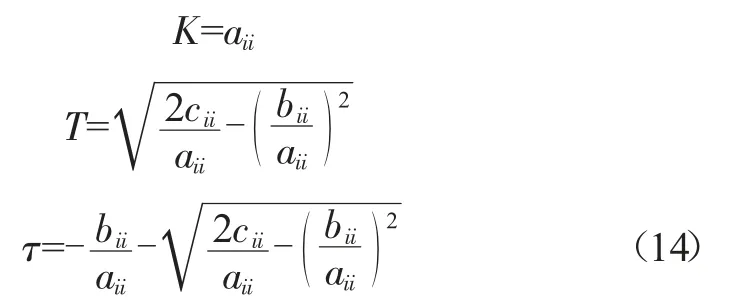
步骤三,令式(12)和(13)中关于“s”的各项系数分别相等,最终可得:
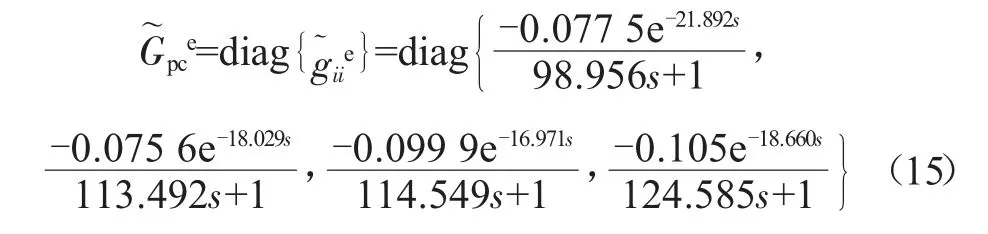
基于上述方法对式(11)中的EOTF模型进行近似,最终得到含有部分耦合的对角近似模型为:
3 分散控制器设计
在将部分耦合模型近似为对角模型后,就可采用单变量系统控制器设计的一系列方法来分别设计各回路的控制器。
考虑到内模控制器设计过程简单、参数少且易于转化为传统反馈控制器的特点,此处先通过两步设计法得到内模控制器,而后基于等效关系得到最终的分散控制器。
依照内模控制器设计的两步法,首先,将回路i的主通道模型进行分解。需要注意的是,这里的主通道模型为2.2节中得到的近似对角模型中的元素,如式(16)所示。

而后,回路i的内模控制器可设计为:
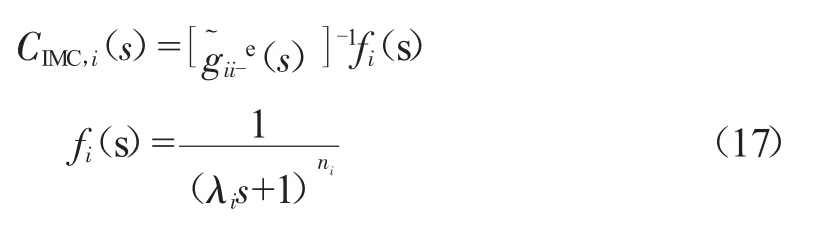
式中:fi(s)为低通滤波器,保证了控制器可实现;ni为滤波器的阶次;λi为滤波器常数,是唯一待整定的参数。
最后,将式(17)代入式(2),即可得到回路i的等效反馈控制器,为:
为便于工业实现,还可将式(18)的控制器转化为PID形式,在此不多做说明。
延续先前对HVAC系统的分析,将本文方法与分散控制[6]和反向解耦控制[7]方法进行仿真对比,结果如图3和表2所示(λi=45;i=1,2,3,4)。很显然,所提方法不论是在干扰响应幅值、稳定时间等动态性能方面,还是在误差积分(IAE)、TV指标方面,都取得了比另两种方法更好的效果。
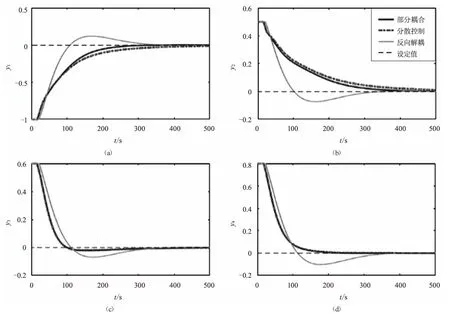
图3 HVAC过程的干扰输出响应

表2 HVAC干扰响应的性能指标
4 结语
本文针对时滞多变量系统的干扰抑制问题,提出了一种基于部分耦合模型的干扰抑制分散控制器设计方法。通过耦合分析,从干扰抑制的角度出发,构建了包含部分耦合动态的被控对象模型,而后对该模型进行对角近似,在不影响系统性能的情况下极大地简化了分散控制器的设计。最后,将本文方法与其他两种方法进行仿真对比,仿真结果证实了所提方法的优越性。
