露天煤矿运输车辆主动防撞预警目标识别系统设计
2022-12-23靳海军邢拴龙张坤飞卢艳道黄国鹏
靳海军,邢拴龙,张坤飞,卢艳道,黄国鹏
(1.神华北电胜利能源有限公司,内蒙古锡林浩特 026000;2.北京中矿华沃科技股份有限公司,北京 100000)
大型露天采矿设备的出现,极大地提高了矿井 的生产效率,促进了采矿技术的现代化发展。然而,由于矿山开采场地存在较多的车辆,并且交通环境十分复杂,大型车辆及设备的盲区较多,因此经常会出现各种安全事故,对矿山的安全生产带来诸多隐患。因此,研究主动防撞预测目标识别系统,对于提高交通安全管理水平,减少煤矿运输车碰撞事故的发生,具有较大的现实意义。
文献[1]提出基于前车驾驶意图辨识的主动防撞预警目标识别系统,以前车踏板信息为观测值,结合双层隐马尔可夫算法构建前车驾驶意图实时辨识模型,并计算前向碰撞风险系数,以提高系统的识别精度。最后,通过识别软件对目标进行仿真测试。文献[2]提出基于组合定位的主动防撞预警目标识别系统,根据运输环境特征,结合无线射频识别技术识别预警目标,并采用扩展卡尔曼滤波对目标的信息进行预处理,以提高预警目标的识别精度。以上两种系统由于信号强度极易受干扰信号影响,导致目标识别结果误差较大。为此,设计了露天煤矿运输车辆主动防撞预警目标识别系统。
1 系统硬件结构设计
系统硬件设计中,将运输车辆前车窗上的工业照相机与后端处理系统相结合,构成一个机器视觉模块,实现对运输车的探测与测距[3]。通过两台VK282传感器,利用ZigBee 射频信号构成点对点的传感网络,获取同一道路上不同运输车辆的相对速度信息,最后的警报判定结果会显示在车辆的处理终端上。
1.1 CPU结构
系统采用S3C2440处理器,其处理速度为400 MHz,计算速度较高。该CPU 使用了标准的视频采集接口,降低了系统开发的难度。在摄像机与主控制器的视频采集接口之间加入了A/D 转换器,以实现摄像机模拟信号的精准采集[4-5]。该系统使用飞利浦公司生产的SAA7113 视频编码芯片,该芯片采用Ycrcb4∶2∶2 格式,并且可以将摄像机采集到的图像进行数字化处理,大大提高了处理效率。CPU 结构如图1 所示。

图1 CPU结构
由图1 可知,该CPU 结构主要包括CAMIF 接口、JTAG 接口和RS232 串行接口等。
1)CAMIF 接口
该接口以Ycrcb4∶2∶2 的方式将所获得的所有视频信号通过C 通道存储到SDRAM中,方便进行后续的图像处理。
2)JTAG 接口
该接口可以存取晶片内的元件信息,借此可以进行系统的调试。
本组研究采用SPSS19.0统计学软件进行数据的分析和处理,计数资料采用(n/%)表示,采用卡方检验,P<0.05为差异具有统计学意义。
3)RS232 串行接口
在系统开发阶段就需要对该接口进行调试,使PC 机与其串行接口相连,以进行图像采集[6]。
1.2 车速传感器
车速传感器是一种可以检测汽车速度的电子设备,控制电脑使用输入信号来控制发动机的怠速[7]。一般情况下,车速传感器都是装在汽车传动桥壳体或齿轮箱外壳中,以避免因高压电气线路、车载电话或其他电子装置引起的电磁及无线电频率干扰,确保电子通信不会受到干扰[8-9]。车速传感器结构如图2所示。
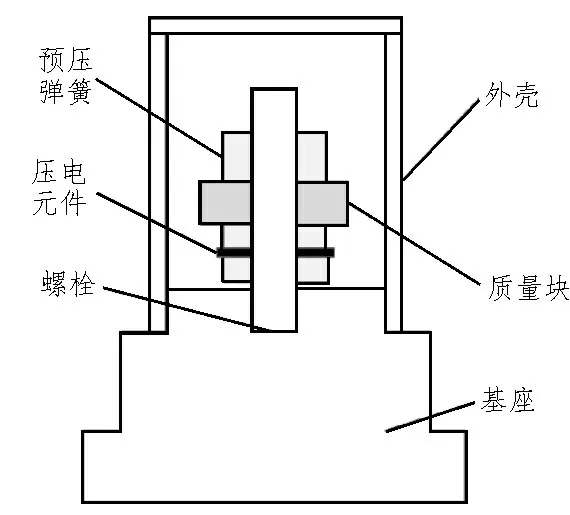
图2 车速传感器结构
1.3 图像传感器
由于露天煤矿的矿车车灯照明距离很短,光线亮度很低,常规摄像机不能满足图像采集要求。并且由于矿用电力供应不足的情况时有发生,容易导致车头大灯的灯光变得很微弱。另外,由于露天煤矿附近无照明,一旦到了夜晚,从普通摄像机中无法获取任何有效信息,为此,使用红外线CCD 摄像机[10-13]。CCD 摄像机结构如图3 所示。
由图3 可知,CCD 摄像机是一种根据光线的强弱来累积一定百分比电荷的半导体成像设备,在摄像时序控制下,将各像素的电荷逐点向外移,并经滤波、放大处理,最终形成影像信号[14]。CCD 摄像机的电子快门是自动的电子快门,能根据光线明暗的不同,自动调节快门的速度,从而得到清晰的影像。

图3 CCD摄像机结构
2 系统软件部分设计
2.1 目标定位
露天煤矿运输车辆主动防撞预警目标定位过程就是车辆测距过程,该过程利用车辆在地面的投影线与其平面坐标之间的关系来判断车辆之间的真实物理距离,基于此计算相对车距,计算公式为:

式中,H表示摄像机的实际安装高度;h表示图像纵坐标和镜头中心纵坐标的差值;θ表示摄像机安装俯仰角;κ表示摄像机有效焦距[15]。
将像素坐标和光芯坐标代入式(1)中,由此得到相对车距,完成目标定位。
2.2 危险目标识别
当露天煤矿运输车辆在道路上行驶时,主要的危险来自同一条车道上的其他车辆,而在其他车道上的车辆通常不会造成危险,为此模拟的露天煤矿运输车辆行驶环境,如图4 所示。
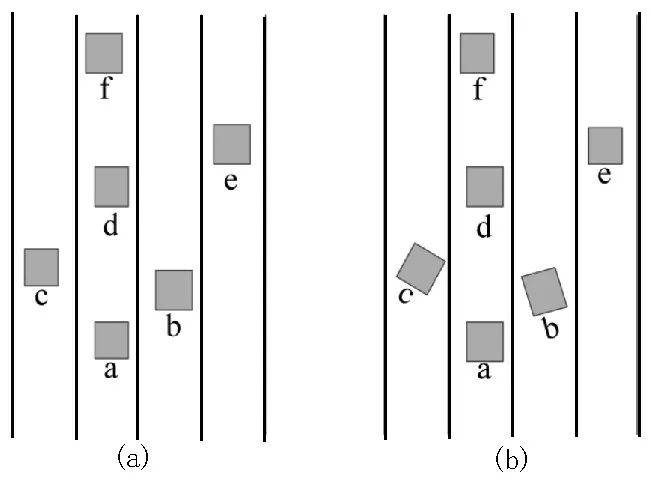
图4 运输车辆行驶环境模拟图
由图4(a)可知,在雷达扫描区域中存在危险目标,除了目标f 之外,最大的威胁是目标d,应该把它们作为主要的判定目标。由图4(b)可知,假定在某个时间点,目标b 通过了其左侧这条线,或者要与目标c 平行地行进,这时要在目标c 右侧道路上找第三个目标。最大的威胁取决于距离的优先次序,如果目标b 发生变道,并在短时间内返回了原车道,那么目标c 就是最有威胁的对象[16]。综合考虑,将前方相同车道内的车辆作为威胁对象,将主要道路上的车辆作为潜在危险对象,将车辆行驶中的车辆作为不存在威胁的车辆,由此完成危险目标识别。
2.3 基于网格法的目标识别结果强化
为了减小目标识别误差,使用网格法强化目标识别结果。首先采用网格法划分由CCD 摄像机拍摄的影像,经过梯度像素代入梯度相关公式为:

式中,g(x,y)表示像素值。利用二线插值法计算运输车道权值,并将计算结果存储到数据库中,实现信息的全面提取与存储。
对于目标识别结果的强化,需要利用样本空间构造判别函数进行判断,公式为:

式中,W表示高维判别矩阵权重;δ表示外部偏置。将待检测的数据经过特征提取后代入式(3),并将计算结果进行二值化处理,实现目标分类。
将待测帧经过特征提取后代入式(2),并对结果进行二值判断,即可实现目标的分类。通过上述公式的计算,可得到分类结果,经过强化处理后,使得识别结果误差更小。
3 实 验
在联想R720 计算平台中,对露天煤矿运输车辆主动防撞预警目标识别系统设计合理性进行实验验证分析[17-18]。
3.1 实验图像采集
采用焦距镜头为35 mm 的工业相机进行实验图像采集,将镜头前方50 m、100 m 处的行驶车辆作为研究对象,每隔5 m 放置一个标桩,当行驶车辆驶入到该路段后,依据设备记录的相关信息,确定车辆行驶位置。实验图像采集结果如图5 所示。
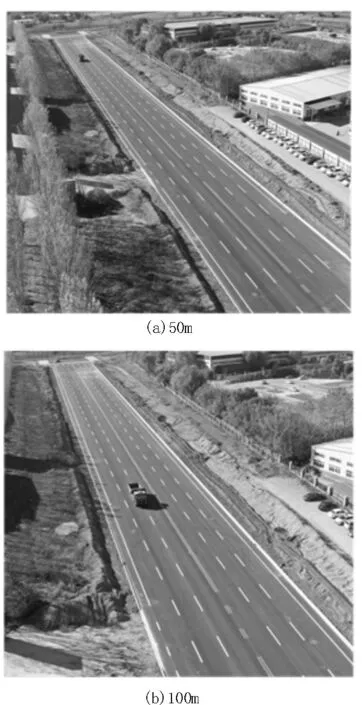
图5 实验图像采集结果
3.2 实验结果与分析
基于上述采集的实验图像,分别使用基于前车驾驶意图辨识的主动防撞预警目标识别系统、基于组合定位的主动防撞预警目标识别系统和该文系统进行验证,对比三种系统在不同车速下的报警距离,如图6 所示。
由图6(a)可知,基于前车驾驶意图辨识的主动防撞预警目标识别系统与实际结果相差较大,在车速为16 km/h时,报警距离与实际距离误差最大,达到18 m;基于组合定位的主动防撞预警目标识别系统与实际识别结果同样存在一定的差距,在车速为34.5 km/h时,报警距离与实际距离误差最大,为7.5 m;该文提出的露天煤矿运输车辆主动防撞预警目标识别系统与实际结果之间虽然存在一定偏差,但是偏差值小于两种对比系统,当车速为40 km/h时,报警距离与实际距离误差最大,仅为2.0 m。
由图6(b)可知,基于前车驾驶意图辨识的主动防撞预警目标识别系统和基于组合定位的主动防撞预警目标识别系统均与实际预警值相差较大,最大误差分别发生在车速为50.5 km/h 和26.5 km/h时,最大数值分别为38 m 和20 m;而该文提出的露天煤矿运输车辆主动防撞预警目标识别系统,与实际预警值相差较小,最大误差发生在车速为16 km/h时,最大数值为0.5 m。
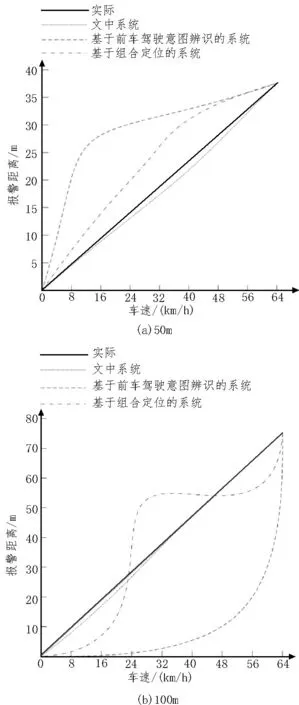
图6 报警距离识别结果对比分析
4 结束语
设计的露天煤矿运输车辆主动防撞预警目标识别系统,将检测坐标载入目标定位模型中测量安全车距,并通过危险目标识别过程,获取识别结果,通过网格法强化目标识别结果,实现车辆主动防撞预警。实验证明,与传统系统相比,该系统获取的识别结果误差更小,因此系统的可靠性更高。
