基于动物行为理论的B/AHP/FAST创新设计方法研究
2022-12-23王慧张书涛邹建强贺成柱
王慧,张书涛,邹建强,贺成柱
基于动物行为理论的B/AHP/FAST创新设计方法研究
王慧1,2,3,张书涛2,邹建强1,3,贺成柱1,3
(1.甘肃省机械科学研究院有限责任公司,兰州 730030;2.兰州理工大学 设计艺术学院,兰州 730050;3.甘肃省草地农业机械重点实验室,兰州 730030)
针对以AHP为核心的集成设计方法不适用于目标用户为动物的情况,研究基于动物行为理论的B/AHP/FAST创新设计方法。将动物行为理论融入用户行为地图Behavior Map中并提取设计需求,再通过AHP/FAST集成方法将设计需求排序后转化为主要功能和次要功能,最后以奶牛饲喂机器人为例详细解释整个创新设计方法的总体框架。得到一种以满足动物基本需求为目标的产品设计方法与思考模式。这种全新的设计方法与模式为同类产品的设计提供了新的思维方式和研究角度,使设计更具系统性和科学性,可为类似设计案例提供方法借鉴。
动物行为理论;B/AHP/FAST;用户行为地图Behavior Map;层次分析法AHP;功能分析系统技术法FAST;奶牛饲喂机器人
随着市场竞争的加剧,产品设计的市场导向逐渐由企业主导转变为用户主导。研究用户在使用产品过程中的生理和心理需求成为设计师开展设计活动的出发点和落脚点[1]。目前基于用户需求的设计方法应用较广泛的有AHP层次分析法以及由此衍生的各种集成方法。王璐瑶等[2]使用AHP层次分析法对用户在物境、情境和意境中的感官需求、使用需求和精神需求进行深入分析,得到基于用户偏好的博物馆文创产品设计层次定位和创新策略;宋端树等[3]探索出一种AHP-FAST集成设计模式,并以助行器老人和轮椅老人使用盥洗设施时的使用需求为实例进行验证和说明;苏建宁等[4]将AHP/QFD/TRIZ方法进行集成,研究用户在设计合理性、实用性、可靠性和经济性方面的需求,并以此为指导对玫瑰花花蕾采摘机进行设计改良;周橙旻等[5]运用B/AHP/FAST集成设计方法研究独臂残疾人在洗浴行为中的单手操作需求,并以需求为导向得到适用于独臂残疾人的洗浴装置。综上所述,基于用户需求研究的各类集成设计方法可以比较客观准确地解决产品设计的立意问题,可以作为产品设计创新的一种思路。但从上述设计与研究中也不难发现,用户需求的研究主体大多是人,需求的获取方法基本采用用户访谈或用户问卷调查的方式进行,这对于一些目标用户为动物的特定产品设计并不适用,因而需要进一步对集成方法进行修改。本研究旨在结合动物行为理论知识探索一种满足动物基本生理需求的新的产品设计方法,期望其为以动物为目标用户的特定产品设计提供新角度和新思路。
1 动物行为理论概述
动物行为是指动物对外界刺激和环境变化所做出的适应性表现,它能够真实地反应出动物生存和生活的实际需要,与动物的健康成长具有密不可分的联系。动物行为作为需求的外在表现,形式和种类繁多,一般分为正常行为与非正常行为两大类。正常行为中常见的有采食行为、排泄行为、群体行为、母性行为以及性行为等;非正常行为一般可以理解为应激行为,无害的应激行为通常会在适应的过程中逐步消除,有害的应激行为(如热应激、异食癖、自我摧残等)会对动物的福利、健康和生产性能产生负面影响,导致动物采食量减少、免疫力减弱、患病甚至死亡[6]。
基于动物行为的仿生设计比较常见,最著名的是“阿莱西水壶”,它以水烧开时蒸汽通过壶嘴发出的清脆叫声仿生鸟类的鸣叫行为,表达对自然的崇敬之情。这类设计一般是通过仿生实现人的某种情感宣泄,产品的目标用户始终是人。将动物行为和动物本身作为研究对象和目标用户的设计案例虽并不常见,但已经开始引起更多人的关注。孙芊芊等[7]通过对羊只生活习性、行为特性及应激反应表现的研究,设计出了避免产生不良应激反应的饲喂装置;孙娜[8]通过对大熊猫生活习性、行为特性和心理特性的研究,设计出了适宜其生存和生活的大熊猫馆内部空间;王静怡等[9]通过研究动物行为学理论,提出了居住区宠物狗活动空间的设计策略。这些研究为动物行为的设计应用提供了启示。
因此,人类需要了解动物行为理论,才能与动物之间和谐发展。对养殖业来说,学习动物行为理论尤为重要。饲养者通过观察动物行为,了解动物的基本需求,并以此为依据选择合适的饲喂设备保障动物生存的基本行为,规避不利的应激行为,这不仅能从根本上提高动物福利,还能为企业带来巨大的经济效益。
2 基于动物行为理论的B/AHP/FAST集成设计方法
B/AHP/FAST方法是一种从用户行为角度出发寻找需求并将需求对应到功能的一种集成设计方法。B代表Behavior Map,即用户行为地图;AHP是一种将决策问题定量化的方法,用来将行为对应的需求进行量化排序;FAST是一种定性分析解决问题的办法,帮助实现需求到功能的转化。
2.1 基于动物行为理论的用户行为地图Behavior Map
用户行为地图也称为用户行为旅程图,通过剖析用户的产品使用过程,将用户使用前、使用中到使用后的整个过程的动作进行分解,聚焦用户在每个使用过程或基本动作中的体验感、交互度、满意值等,从用户角度挖掘产品的需求点、痛点和满意点,为最终设计方案的提出提供依据[10]。
基于动物行为理论的用户行为地图是将动物的行为表现与产品的使用联系在一起,通过分析动物在使用或接触某类特定产品之前、之中和之后的动作分解、行为反应特点、应激反应等,寻找造成应激反应的痛点因素,并最终在满足动物各阶段生理需求的前提下映射为相对应的设计需求,进而指导产品的设计。如表1所示,基于动物行为理论的用户行为地图包括三个阶段,即相关行为活动前P1、相关行为活动中P2、相关行为活动后P3,最终设计需求为N1、N2、N3…N。
表1 基于动物行为理论的用户行为地图

Tab.1 User Behavior Map based on Animal Behavior Theory
2.2 层次分析法AHP
层次分析法,英文全称Analytic Hierarchy Process,缩写AHP,它的核心内容是将各级目标和准则的影响因子进行分层次、定量化分析,并通过计算获得决策结果[11]。在产品概念创新设计中,采用AHP层次分析法可以将定性的设计决策因素进行定量化计算,从而规避了设计决策结果可能存在的主观性和随意性问题,使之更具可行性和合理性[12]。
2.3 功能分析系统技术法FAST
功能分析系统技术法,英文全称Functional Analysis System Technology,缩写FAST,它的核心内容是将总功能分解为一种自上而下的多层级递进关系,从而确定各层级间的主次关系以帮助定义和解析产品的功能体系[13]。在产品设计领域中使用此方法可以帮助创建产品功能树模型[14]。
2.4 基于动物行为理论的B/AHP/FAST集成设计方法流程
基于动物行为理论的B/AHP/FAST集成设计方法从动物行为出发寻找产品设计需求,通过定性和定量相结合的方法分析和解决问题。基于动物行为理论的B/AHP/FAST集成设计流程分为三个步骤,即需求推导、需求优先级判断、功能体系构建,如图1所示。第一步分析动物在相关行为过程中的动作步骤、行为特点、应激诱因、生理需求等,提取出基于动物行为的设计需求;第二步使用AHP方法对需求进行分阶段判断、权重计算、一致性检验、综合排序等;第三步使用黑箱法将需求按优先等级释义为功能,再将所有功能带入FAST功能模型树中,整合为产品的基本功能和次级功能,构建出完整的产品功能体系,生成方案并展示效果[15]。

图1 基于动物行为理论的B/AHP/FAST整体设计流程
3 实例研究
本研究以奶牛饲喂机器人设计为例,将基于奶牛行为理论的B/AHP/FAST集成方法应用于设计需求的推导和需求转化等过程,指导得出最终设计方案。
3.1 基于奶牛行为地图Behavior Map的需求推导
奶牛的行为相对简单,与饲喂机器人相关的行为主要为采食行为,伴随采食过程还会产生其他相关行为。例如在等待进食之前,因饲喂机器人的入场可能会导致奶牛产生躲避行为和探究行为;在进食中,由于奶牛的采食偏好可能会产生挑食行为和滚料行为;在进食后,还会有饮水、反刍、休息等行为。本研究通过查询资料、访问饲养者、观察及经验总结对奶牛采食过程进行解读分析,分析各阶段行为的特点以及出现应激反应的诱因,并从设计的角度规避这些问题,从而收集提取饲喂机器人的设计需求。
首先,将奶牛采食过程分为采食前、采食中和采食后三个阶段,列举每一阶段伴随采食行为产生的其他行为;然后,分解每一阶段奶牛的动作,分析每步动作的行为特点以及可能导致产生应激反应的因素;最后,根据上述内容推导得到奶牛在不同阶段的生理需求,进而得出奶牛饲喂机器人的设计需求,如图2所示。

图2 奶牛采食过程的行为旅程图
通过奶牛行为地图推导,得出16项设计需求,即巡航定位、低噪运行、造型圆润光滑、缩短奶牛等待进食的时间、提供安静舒适的进食环境、遇到障碍可以紧急制动、布料及时充足且能检测草料中的异物、随时观察奶牛状况、提供营养丰富的新鲜饲料、推回饲料并进行二次补给、二次补给要及时、剩余饲料回收、饲喂数据信息收集、清扫饲料残渣、速度可控和自动充电。
3.2 基于AHP的需求优先级排序
3.2.1 构建递阶层次结构
将基于奶牛采食行为地图得到的设计需求按行为阶段、动作步骤等进行分类,构建需求递阶层次模型,如图3所示。
目标层为总目标,即设计一款动物友好型智能饲喂机器人产品;准则层中根据奶牛行为地图将采食过程分为采食前、采食中和采食后三个阶段(P1-P3);子准则层为设计需求,将推导出的16种需求进行归纳合并,得到缩短奶牛等待时间,巡航定位、低噪运行,造型圆润,安静舒适的进食环境,遇到障碍可制动,布料及时充分能检测草料中的异物,随时观察奶牛状况,提供新鲜营养的饲料,推回饲料并及时二次补给,剩余饲料回收,饲喂数据收集,清扫饲料残渣,速度可控、自动充电14个需求指标(N1-N14)。

图3 奶牛饲喂机器人设计需求递阶层次模型
3.2.2 构建比较判断矩阵
在递阶层次模型的基础上设计专家调查表,并针对调查表给出的问题选择三组不同行业的相关专家进行重要度打分。组1选择奶牛行为专家4名,组2选择奶牛饲养专家4名,组3选择饲喂设备相关专家4名,专家打分的形式采用“九级标度法”,即对同一层级中的元素进行两两比较,运用定量化的数字打分比较两者之间相对于上一层级的重要度[16]。标度量化值及其与重要度的对应关系,如表2所示。
将所有的专家打分结果录入决策分析软件Yaahp,并选择合适的数据集结方式进行数据的集结与统计。最终,采用专家排序权重结果集结方式,依据每个专家的每一层级的分值构建判断矩阵,12位专家共得到48个判断矩阵,此处以最接近最终结果的专家5的判断矩阵为例进行说明,如表3—4所示。
表2 标度量化值及对应的重要度含义

Tab.2 Scale quantization value and corresponding significance meaning
表3 准则层判断矩阵及权重(专家5)

Tab.3 Judgment matrix and weights of the criterion level (Expert 5)
表4 子准则层判断矩阵及权重(专家5)

Tab.4 Judgment matrix and weights of the sub-criteria level (Expert 5)
在专家5的准则层中,采食中的设计需求权重值最大,子准则层中排在前五的需求分别处于采食中和采食前这两个层级,分别为N6、N9、N10、N1、N8。
3.2.3 一致性检验
一致性检验是证明数据可靠性的有效手段,在矩阵构建完成后,需要计算一致性指标值(=/)。若<0.1,则满足一致性检验;若≥0.1,则不满足一致性检验,需要对未通过检验的专家打分数据实行人为干预修正并再次分析。
对专家5的数据来说,max=3.002 6,=0.52,矩阵阶数=3,针对准则层的判断矩阵一致性计算如下:

式中:为判断矩阵一致性指标;max为最大特征根;为矩阵阶数。
式中:为一致性比率;为——随机一致性指标。
由公式计算可知:=0.001 3,=0.002 5<0.1,即认为专家5的准则层矩阵通过一致性检验。然后继续对专家5的子准则层的3个判断矩阵进行一致性检验,计算得出的值分别为0.062 4<0.1,0.082 3< 0.1,0.097 9<0.1,因此专家5的判断矩阵满足一致性检验,模型和权重值具有可用性。
对于由多个专家打分所得的判断矩阵,必须确保每个专家的判断矩阵都能通过一致性检验才能说明数据的真实可靠,通过Yaahp软件计算得出12位专家的48个判断矩阵的一致性比例<0.1,这说明所有专家的判断矩阵均通过一致性检验,层级模型和权重值可以作为下一步分析判断的依据。
3.2.4 综合需求评定
综合需求评定即层次总排序,将各层级下的准则层指标权重值与其子准则层指标的权重相乘,乘积按数值大小进行排序即得到最终评定结果。本研究中,首先将12位专家对每个指标的打分权重值进行平均,然后将不同阶段的平均权重P与子需求权重N相乘(P×N),得到综合权重值并排序,如表5所示。
表5 综合权重及排序

Tab.5 Comprehensive weight and sorting
从表5可知,采食中设计需求>采食前设计需求>采食后设计需求;二级指标的前五名为:P2×N6布料及时能检测草料中的异物>P2×N9推回饲料进行及时二次补给>P2×N10剩余饲料回收>P1×N1缩短奶牛等待时间>P2×N8提供新鲜营养的饲料。因此,功能应向采食中的设计需求倾斜,同时要着重关注布料及时并检测草料中的异物、推回饲料进行及时二次补给、剩余饲料回收、缩短奶牛等待时间、提供新鲜营养的饲料等需求。
3.3 基于FAST的功能推导
3.3.1 基于黑箱原理的需求转化
通过奶牛采食行为地图推导获得饲喂机器人的设计需求后,需要将需求转化为产品功能要素。首先,通过权重计算,将全部需求进行排序,筛选出主要需求和次级需求;然后,将主要需求带入黑箱模型中释义为基本功能,次级需求带入黑箱模型中释义为次级功能。
本节主要展示基本功能的释义过程,次级功能与之类似,将不再阐述。黑箱原理转化过程得出的基本功能有:布料功能、推料功能、落料回收功能、采料功能、搅拌与运输功能,如图4所示。
3.3.2 构建FAST功能模型
将黑箱法转化得到的所有功能带入FAST功能树模型中进行功能的归类和分解,将各级功能之间的关系串联起来,绘制奶牛饲喂机器人FAST功能模型,得到系统全面的功能体系,如图5所示。

图4 基于黑箱原理的基本需求转化

图5 奶牛饲喂机器人FAST功能模型
综上所述,基于奶牛行为理论的产品设计应着重于各功能的集成和整合,核心功能是实现采料、运输、搅拌、布料、推料和落料回收的集成化,并在此基础上附加安全性、多适应性调节和信息收集反馈等多项次级功能。
3.4 设计实例说明
奶牛饲喂机器人是一种畜牧行业专用的饲喂装备,主要原理是通过智能化和自动化的控制方式实现对奶牛饲喂流程的远程控制,它可以降低人工成本实现高效饲喂,是近几年在国外市场上较流行的一种饲喂方式。
结合基于奶牛行为理论的B/AHP/FAST集成方法的定量与定性研究结果,综合功能、结构、外观等设计因素,开展新型智能奶牛饲喂机器人设计,产品设计效果如图6所示。
在基本功能中,方案采用基于奶牛行为理论的B/AHP/FAST集成方法的推导结果,将采料、运输、布料、推料、落料回收等流程集于一体,使饲喂过程更加系统科学,如图7所示。具体饲喂实现的流程为:图7a中的采料部件将窖储的料草采挖打散并通过料筒送入料仓;饲喂机器人到达牛舍后,图7c中的布料部件开始布料;奶牛在吃料时会翻滚料草,图7b中的推料部件将翻滚出饲喂范围外的料草推回;进食完毕后,图7d中的采料部件将余料进行回收。
在次级功能中,对于集成方法得到的安全性与多适应性调节的结论也有体现。例如,在安全性指标方面,饲喂机器人尾部装有雷达探测仪,可自动扫描路线及障碍物的位置;运动部件周围以警示灯或警示条的形式进行安全提示;整体造型圆润光滑,防止奶牛触碰或舔舐时受伤。在多适应性调节方面,采料铲斗可实现纵向伸缩、旋转,以及横向平移等操作,极大地拓展了作业范围,如图8所示;推料机构可收缩、可旋转,适用于不同宽度的饲喂通道,如图9所示。
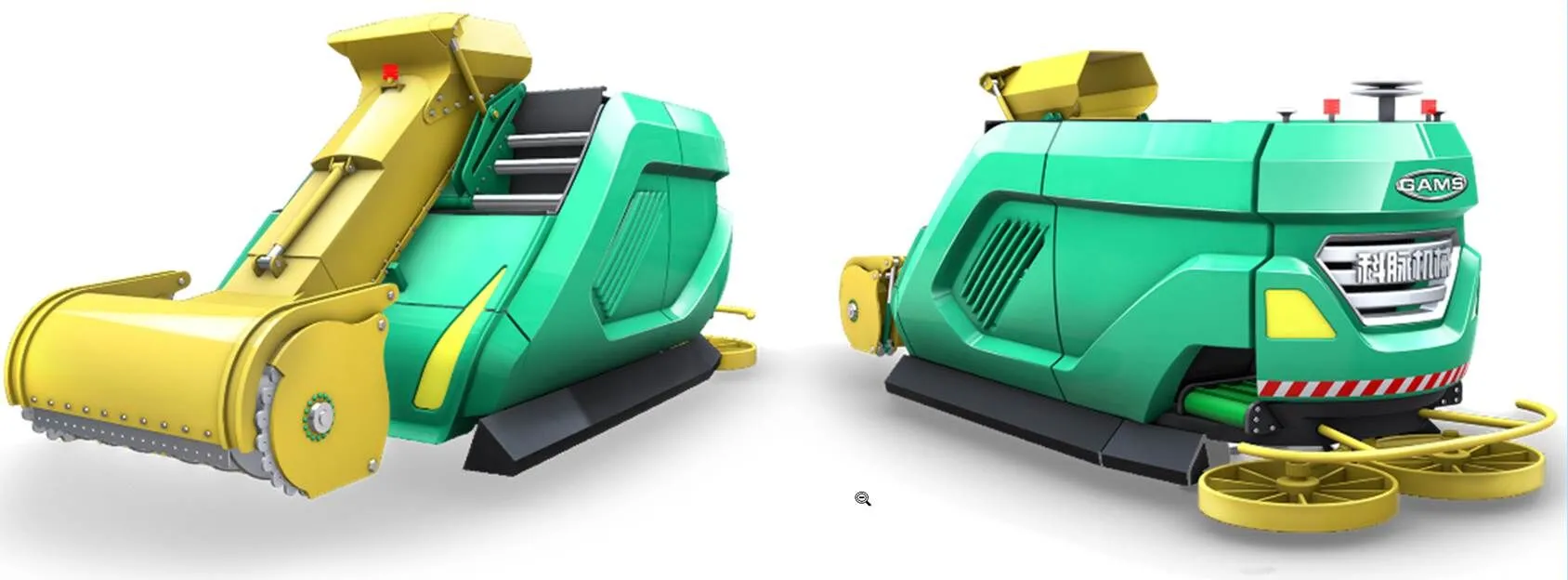
图6 奶牛饲喂机器人产品效果图展示

图7 饲喂机器人的四种基本功能模式

图8 作业宽度可调的采料结构

图9 作业宽度可调的推料结构
4 结语
本文在动物行为理论的基础上,将动物行为与动物需求作为产品设计的出发点,构建了基于动物行为的B/AHP/FAST集成设计方法及流程。实例验证表明,基于奶牛采食行为的B/AHP/FAST集成方法可以为饲喂机器人的设计提供定量与定性相结合的解决问题的办法和思路,并获得基于奶牛需求角度的饲喂机器人功能体系。该集成方法不仅能让设计过程更具合理性和客观性,还有效地弥补了现有设计方法的局限,能够为某一类以动物为目标用户的产品设计提供参考依据。
[1] 赵紫薇, 余森林. 面向用户需求的家用水果酿酒机设计[J]. 机械设计与研究, 2021, 37(4): 202-207.
ZHAO Zi-wei, YU Sen-lin. Research on the Design of Household Fruit Brewing Machine Based on User Needs [J]. Machine Design & Research, 2021, 37(4): 202-207.
[2] 王璐瑶, 周雨卉, 李永春. 基于层次分析法的博物馆文创设计研究[J/OL]. 包装工程, https://kns.cnki. net/kcms/detail/50.1094.TB.20211115.2012.008.html.
WANG Lu-yao, ZHOU Yu-hui, LI Yong-chun. Research on Museum Cultural and Creative Design Based on Analytic Hierarchy Process[J/OL]. Packaging Engineering, https://kns.cnki.net/kcms/detail/50.1094.TB.20211115.2012.008.html.
[3] 宋端树, 许艳秋, 崔天琦, 等. 基于AHP-FAST的产品概念创新设计模式研究[J]. 包装工程, 2019, 40(24): 228-234.
SONG Duan-shu, XU Yan-qiu, CUI Tian-qi, et al. Innovation Design Model of Product Concept Based on AHP-FAST[J]. Packaging Engineering, 2019, 40(24): 228-234.
[4] 苏建宁, 魏晋. 基于AHP/QFD/TRIZ的玫瑰花蕾采摘机设计[J]. 机械设计, 2020, 37(8): 121-126.
SU Jian-ning, WEI Jin. Design of Rose Buds Picking Machine Based on AHP/QFD/TRIZ[J]. Journal of Machine Design, 2020, 37(8): 121-126.
[5] 周橙旻, 何晨晨, 马伯尧. 基于“B-AHP-FAST”的独臂残疾人卫浴装置设计探究[J]. 包装工程, 2020, 41(24): 143-149, 161.
ZHOU Cheng-min, HE Chen-chen, MA Bo-yao. Design of Sanitary Ware for One-Armed Man Based on “B-AHP-FAST”[J]. Packaging Engineering, 2020, 41(24): 143-149, 161.
[6] HERBUT P, ANGRECKA S, GODYŃ D, et al. The Physiological and Productivity Effects of Heat Stress in Cattle - a Review[J]. Annals of Animal Science, 2019, 19(3): 579-593.
[7] 孙芊芊, 李海军, 宣传忠, 等. 基于羊只应激反应的智能饲喂机器人功能与造型研究[J]. 内蒙古农业大学学报(自然科学版), 2019, 40(5): 60-64.
SUN Qian-qian, LI Hai-jun, XUAN Chuan-zhong, et al. Research on Function and Modeling of Intelligent Feeding Robot Based on Sheep Stress Response[J]. Journal of Inner Mongolia Agricultural University (Natural Science Edition), 2019, 40(5): 60-64.
[8] 孙娜. 济南动物园大熊猫馆内部空间改造设计研究[D]. 曲阜: 曲阜师范大学, 2019.
SUN Na. Research on Interior Space Reconstruction Design of Giant Panda Pavilion in Jinan Zoo[D]. Qufu: Qufu Normal University, 2019.
[9] 王静怡, 张萃茵, 林杰贤, 等. 动物行为学在居住区宠物狗活动空间的设计应用[J]. 绿色科技, 2019(13): 13-17, 22.
WANG Jing-yi, ZHANG Cui-yin, LIN Jie-xian, et al. Design and Application of Ethology in Pet Spaces of Residential Area[J]. Journal of Green Science and Technology, 2019(13): 13-17, 22.
[10] 李婉姗. 基于“B-FAST-QFD”的家用中医理疗产品造型要素研究与实践[D]. 湘潭: 湘潭大学, 2019.
LI Wan-shan. Design and Research of Chinese Medicine Physiotherapy Products Guided by “B-FAST-QFD”[D]. Xiangtan: Xiangtan University, 2019.
[11] SIRISAWAT P. Fuzzy AHP-TOPSIS Approaches to Prioritizing Solutions for Reverse Logistics Barriers[J]. Computers & Industrial Engineering, 2018, 117: 303-318.
[12] GNANAVELBABU A, et al. Ranking of MUDA Using AHP and Fuzzy AHP Algorithm[J]. Materials Today: Proceedings, 2018, 5(5): 13406-13412.
[13] KEVIN N. Product Design[M]. Beijing: Electronic Industry Press, 2007.
[14] 董晓玮, 徐晓琴. 基于FAST模型的水果快递箱概念设计[J]. 包装工程, 2020, 41(3): 77-81.
DONG Xiao-wei, XU Xiao-qin. Conceptual Design of Fruit Express Box Based on FAST Model[J]. Packaging Engineering, 2020, 41(3): 77-81.
[15] 陈晨, 孙志学, 张乐. FAST法在家用智能固体有机废弃物处理机概念设计中的应用[J]. 机械设计, 2017, 34(1): 110-113.
CHEN Chen, SUN Zhi-xue, ZHANG Le. Application of FAST Method in the Conceptual Design of Domestic Intelligent Solid Organic Waste Processor[J]. Journal of Machine Design, 2017, 34(1): 110-113.
[16] HUSAM J, HAJEM A. 评价翻转课堂学习的层次分析法[J]. 计算机、材料和连续体, 2021(3): 2229-2239.
HUSAM J, HAJEM A. Analytic Hierarchy Process for Evaluating Flipped Classroom Learning[J]. Computers, Materials, & Continua, 2021(3): 2229-2239.
Research on Innovative Design Method of B/AHP/FAST Based on Animal Behavior Theory
WANG Hui1,2,3, ZHANG Shu-tao2, ZOU Jian-qiang1,3, HE Cheng-zhu1,3
(1.Gansu Academy of Mechanical Sciences Co.,LTD, Lanzhou 730030, China;2.School of Design Art, Lanzhou University of Technology, Lanzhou 730050, China;3.Key Laboratory of Grassland Agricultural Machinery,Gansu Province, Lanzhou 730030, China)
Given that the integrated design method based on AHP is not suitable for the target users of animals, the paper aims to explore the B/AHP/FAST innovative design method based on animal behavior theory. Firstly, the animal behavior theory is integrated into the User Behavior Map to extract the design requirements. Then, the AHP/FAST integrated method is used to sort and transform the design requirements. Finally, the overall framework of the innovative design method is explained in detail by taking the dairy cow feeding robot as an example. A kind of product design method and thinking mode aiming at meeting the basic needs of animals are obtained. This new design method and mode provides a new way of thinking and research perspective for the design of similar products, making the design more systematic and scientific, and providing a reference for similar design cases.
Animal Behavior Theory; B/AHP/FAST; User Behavior Map; Analytic Hierarchy Process; Functional Analysis System Technology; Dairy cow feeding robot
TB472
A
1001-3563(2022)24-0144-09
10.19554/j.cnki.1001-3563.2022.24.016
2022–07–30
甘肃省科技重点研发计划项目(20YF3GA005)
王慧(1985—),女,硕士,工程师,主要研究方向工业设计。
张书涛(1982—),男,博士,副教授,主要研究方向工业设计、感性工学等。
责任编辑:马梦遥
