基于虚拟现实的遥控型无人特种车辆交互设计研究
2022-12-22钱晓松杨建明朱特
钱晓松,杨建明,朱特
【院士专栏:国防装备设计与制造】
基于虚拟现实的遥控型无人特种车辆交互设计研究
钱晓松1,杨建明2,朱特2
(1.北京科技大学,北京 10083;2.北京理工大学,北京 100081)
探索虚拟现实技术下遥控型无人特种车辆交互范式,提升遥控型无人特种车辆作业效率和用户体验。通过eGOMS模型分别对虚拟现实场景和真实场景的遥控型无人特种车辆交互流程进行建模,并对所得模型进行操作时间的预测与分析,采用RoboMaster平台对用户在两种不同场景下开展绩效实验与NASA-TLX问卷访谈。结合主客观两个方面,对交互过程进行综合评价。量化作业绩效实验数据与用户脑负荷问卷感受数据对比结果同时呈现虚拟现实交互更具有优势,但具体作业时间与模型预测有差异;实验的结果显示,无论是虚拟现实还是真实场景,基于eGOMS模型预测的交互操作时间均大于用户实际交互操作时间。虚拟现实技术可以有效提升遥控型无人特种车辆交互的用户体验与作业效率,提升车辆控制交互系统的易学性;研究也进一步发现eGOMS模型中的标定与插入规则需要适当更新以适应专家用户。虚拟现实技术将有效地提升遥控型无人特种车辆的作业效能,大幅降低高危岗位人员的作业风险,从而促进遥控型无人特种车辆在消防、抢险救灾、国防等领域的普及应用。
遥控型无人特种车辆;虚拟现实;交互设计;eGOMS模型
遥控型无人特种车辆(Remote-controlled Unmanned Special Vehicle,缩写RCUSV)是一种通过遥控操作,可一次或多次使用,并能携带一定数量任务载荷的地面机动平台。当今,无人特种车辆大量应用于消防、公安、勘探、运输、抢险救灾、国防等领域,极大地降低了危险领域作业人员的危险程度。然而无人特种车辆传统的遥控交互方式并不完善,这影响了其充分发挥效能,阻碍了RCUSV的普及推广与发展。行业亟待改进遥控方式,探索一种更高效的RCUSV交互范式,使其在实战中达到设计的预期性能。
1 研究背景
在大量长时间作业过程中,RCUSV的操作员必须处于实际场景中,采用传统屏幕+杆式遥控的控制交互方式,暴露出战场环境态势感知能力差、脑负荷重、学习成本高等问题。中科院张凤军等[1]、王宏安等[2]在研究中提出,交互应当遵循人机和谐以人为本的设计原则。RCUSV设计者将高交互效率和自然的交互方式作为新一代系统的重要指标。Bolton等[3]指出人机交互系统中直接将用户现有的自然交互行为映射到标准操作流程中,有利于提高人机交互系统的可用性。虚拟现实技术(Virtual Reality,VR)具备沉浸感(Immersion)、交互性(Interaction)、和构想性(Imagination)三个基本特征。它的沉浸式临场感体验和自然交互方式,给RCUSV用户带来了一种全新的控制交互体验。姚寿文等[4]总结了未来坦克虚拟现实远程驾驶控制的技术框架和关键技术,并通过案例分析说明了虚拟现实技术可以提升远程作业的临场感。然而,由于无法继续沿用WIMP等成熟的交互范式,所以针对RCUSV的虚拟现实交互仍处于发展阶段。
David[5]提出了用于研究计算机人机交互系统流程的GOMS任务建模方法。该模型提出后普遍用于人机交互领域[6]。GOMS是目标、操作、方法、选择(Goals、Operators、Methods、Selection Rules)规则的缩写。Saitwal[7]凭借GOMS模型对医院的EHR(Electronic Health Record)系统任务分析,减少流程和脑力负荷是系统优化的两个重要方向。Kieras[8]的研究提出了对操作流程和环节的优化设计方法。王传龙[9]用GOMS对iOS系统的通话功能进行分析,总结出GOMS模型在手持设备中交互设计原则和系统步骤设计方法。李翔等[10]分析了GOMS模型几种经典变形后,提出了BHR–GOMS模型,该模型将行为进行了层次量化,并在车辆交互界面的评价中进行应用。经过多年的优化迭代,GOMS延伸出的数种变体逐渐满足了不同系统下相同任务的测试比较,开始被应用于车辆交互界面的测试评价当中。
GOMS模型是迄今为止较为成功泛用的人机交互模型,在第一代(命令行)和第二代(WIMP)人机交互界面的评价优化中应用广泛[11],然而无法直接用于虚拟现实交互环境评价测试中。在GOMS模型中,用户必须精确操作,但是VR环境中多数时间用户执行为线性模糊操作。线性模糊操作可以降低认知负荷,为了实现VR环境交互的自然性和高效性,必须兼容用户的模糊表达。VR环境中,交互时间不能像GOMS模型一样作为唯一指标,需要增加评价指标。中国科学院王晖等[12]再次优化了GOMS模型(eGOMS),使其能够适用于虚拟现实自然人机交互的分析,eGOMS模型中整合了虚拟现实中的多通道信息,通过系列操作完成期望目标。在eGOMS中,M代表Modals,是多模态多通道交互方式;S代表Synthesization,其指代交互命令,指多模态交互在特殊情境下的整合方式。优化后的eGOMS模型被用于对PIBG交互范式进行评估测试[13],展示了其针对VR环境的可用性。
认知负荷一般被称为Mental Workload或Cognitive Workload,表示表征工作状态下脑力资源占用率,是一个复合的多维度概念[14]。北约人因特别委员会认为,认知负荷涉及任务需求(task demand)、时间压力(time pressure)、操作者能力(operator's capacity)、努力程度(effort)、绩效(performance)和其他因素[15]。徐小萍等[16]基于认知理论建立了“认知–行为–环境”的VR自然交互认知数学模型,该模型具有一定的可行性,但是仅通过客观数据无法量化主观用户体验感受。林琳[17]总结了在虚拟现实培训环境下降低认知负荷的九条原则,对RCUSV的认知负荷降低有一定的参考价值。通常业界公认认知负荷是指任务所需脑力资源与作业人员的可用脑力资源之比,可以较为真实地体现交互过程中用户的主观脑负荷强度。主观认知负荷评估涉及到调查和问卷等技术手段。常用的问卷包括单维度的RSME量表和多维度的NASA–TLX量表和SWAT量表。本研究采用NASA–TLX量表作为主观评价部分的测试方法。
本研究将通过综合eGOMS模型和认知负荷理论,对RCUSV人机交互过程中的主要典型任务进行质化量化综合分析,并采用模拟实车作业实验对RCUSV虚拟现实交互设计进行测试,结合客观任务绩效数据与主观问卷访谈数据,为RCUSV的交互步骤设计优化提供理论分析根据和优化方向。
2 研究方法
eGOMS模型有效拓展了模型在虚拟现实交互中的实用性,但由于其评价指标只有客观操作时间,忽视了用户对于交互系统操作的主观体验感受,所以可以将其作为客观评价的指标模型。主观评价方面,针对RCUSV交互操作中存在的用户脑负荷大和学习成本高的突出问题,采用认知负荷度量方法作为主观评价指标。辅助用户访谈进行补充和评价验证。
2.1 典型RCUSV作业任务的eGOMS模型分析
本研究选取消防类中小型RCUSV为研究对象,对其典型作业任务进行实地调研与枚举统计,深入消防类RCUSV生产设计厂家和应用一线单位,选取了一家RCUSV生产厂家和中澳两国5个消防RCUSV用户单位进行访谈和调研。作业类型差异存在不同的RCUSV操作流程,本研究将理论预测时间与实际作业时间进行比对,利用eGOMS模型对典型任务的交互过程进行分析,为RCUSV虚拟现实的遥控交互提出迭代与修正建议。调研统计结果显示(见图1),典型作业中“勘查、灭火”两类任务的执行次数占比最为突出,占据全部RCUSV出动架次的68.1%。故将这两项任务的交互过程进行重点研究分析。
GOMS模型中的基本行为时间[5][18]与心理准备(M)的插入规则已经有较为成熟的标定规则[6][19](见表1—2),但是由于虚拟现实交互为一个连续线性的多模态交互,所以分析开始前需要对RCUSV任务中的行驶中途时间进行标准时间标定。测试环境中需要行驶距离为10 m,车辆限速为2 m/s,车辆加速和刹车能力为2 m/s2,故通过加速度位移公式(t2–02=2as)可以得出行驶动作(T)的理想标定值为6.15 s。
2.2 勘查作业任务分析
勘查作业任务操作分析见图2,用户指向选定方向P,执行前进指令并调整方向K、P、T,抵达预定战位后搜索目标P×10(平均搜寻10次),搜索到目标后汇报结果P、K。根据eGOMS的基本操作行为与心理准备插入规则得到M+P+M+K+M+P+M+T+(M+P)x10+M+P+M+K,见表3。此阶段用eGOMS理论时间为:1.35+1.10+1.35+0.20+1.35+1.10+1.35+6.15+(1.35+1.10)×10+1.35+1.10+1.35+0.20=42.45 s。

图1 消防RCUSV任务时间占比统计
表1 eGOMS基本操作时间

Tab.1 eGOMS basic operating time
表2 心理准备M的插入规则

Tab.2 Insertion rules of psychological preparation M
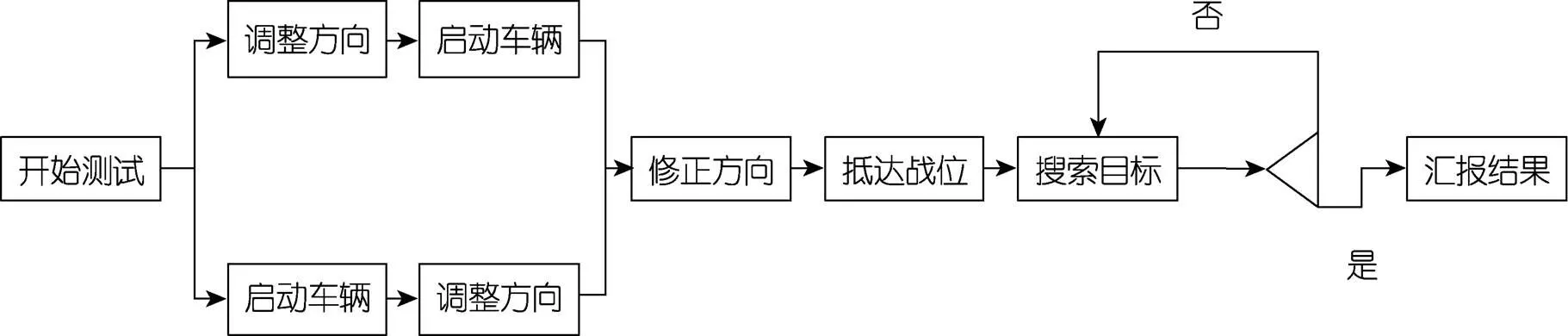
图2 勘查作业测试流程分析
2.3 灭火作业任务分析
用户指向选定方向P,执行前进指令并调整方向K、P、T,抵达预定战位后搜索火点P,搜索到目标后瞄准火点执行灭火P、K(见图3)。根据eGOMS的基本操作行为与心理准备插入规则得到M+P+M+K+M+P+M+T+M+P+M+K,见表3。此阶段用eGOMS理论时间为 1.35+1.10+1.35+0.20+1.35+1.10+1.35+6.15+1.35+1.10+1.35+0.20=17.95 s。

图3 灭火作业测试流程分析
表3 测试任务模型理论时间预测

Tab.3 Theoretical time prediction of test task model
3 实验研究
3.1 被试选择
本研究选取的30名被试者,其中男、女各15人,年龄均为20~35岁的青年人(平均值年龄24.6岁,SD=7.3)。且所有被试者均能熟练操作实验用RCUSV设备,有充足的遥控驾驶经验。所有被试者身体健康,实验前均签署同意书。
3.2 实验环境
实验场地分为控制室和测试场两个房间,控制室保持安静,放置被试者和遥控设备。测试场15 m×8 m布置模拟火场的复杂地形用于模拟驾驶,环境光照度控制在75lx,用以模拟消防作业的能见度环境。目标位数字标签尺寸为25 cm×25 cm的硬卡纸,场地布置如图4所示。两个房间中间被不透光的墙体遮挡,测试者只能通过Wi-Fi控制和查看RCUSV及现场环境。
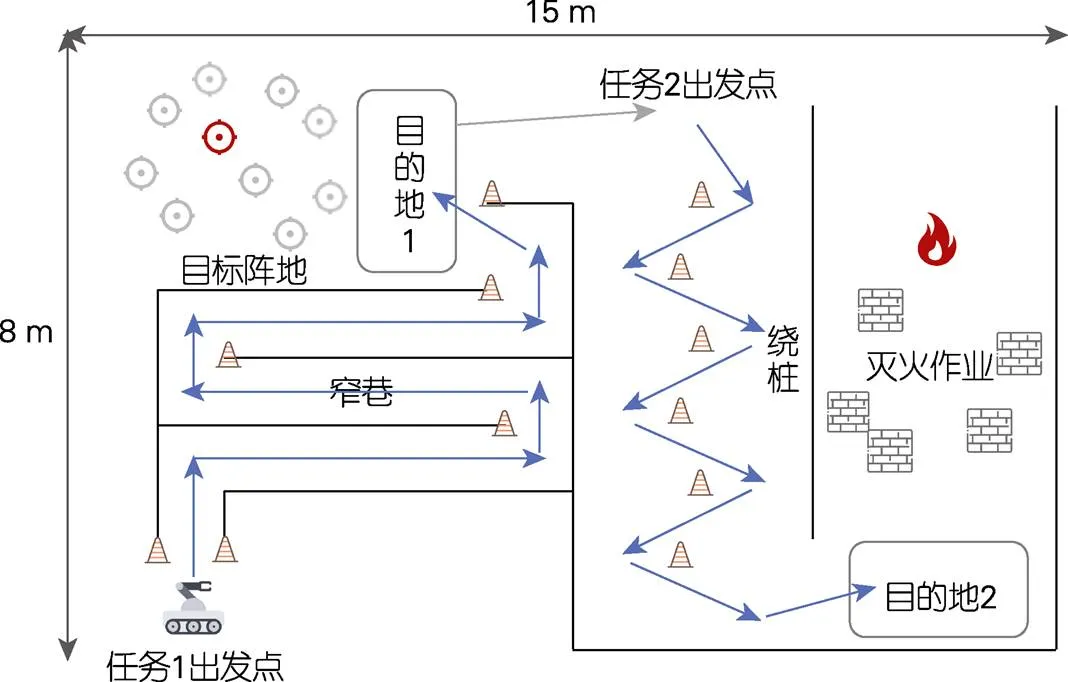
图4 实验环境设计
3.3 实验设备
RCUSV虚拟现实交互实验硬件环境由DJI Googgles RE头显、RoboMaster S1、Vrpark体感手柄搭建,模拟该型车辆在虚拟现实环境中的交互控制。传统控制实验环境由MustHD显示器、StartRC遥控器、RoboMaster S1搭建,模拟该型车辆传统杆屏遥控的交互控制。将头部传感器映射为作业模块转动与俯仰轴,手柄摇杆映射为车辆前进与转向轴,映射比为1∶1.2。车辆速度最高为2 m/s。
3.4 实验设计
整个实验分为2个任务,其中任务1是用户执行勘查作业的过程,任务2是执行灭火作业的过程。以场景类型为自变量,操作时间和出错率为因变量。
任务1中,被试者需要驾驶RCUSV通过窄通道抵达目的地1,然后在目的地1控制RCUSV作业模块,搜索指定的数字标卡,找到后瞄准实用激光照射标定。完成后驶离目的地1,前往任务2开始点,此专场过程不记录时间。任务2中,被试者需驾驶RCUSV避开障碍物(绕桩)后迅速抵达目的地2,然后控制作业模块,搜索指定的起火点,并对起火点(发光标牌代替)瞄准发射水弹,完成后测试结束。

4 实验结果分析探讨
4.1 实验数据分析
实验共采集30组数据,因为其中3份数据出现了无线通信干扰间歇中断,1份数据中因水弹过度泡发卡滞俯仰机不能准确运转,故排除这4份异常样本,对余下的26份样本数据的2个任务平均错误率和平均作业时间分别进行分析。选择交互环境为自变量,作业时间和错误率为因变量,自由度为26,经过SW检验各组平均错误率和作业时间数据之间值均大于0.05,检验结果表明各组数据均符合正态分布。进而采用SPSS进行T检验分析差异性(置信度为95%)。
1)任务错误率。在错误率方面,勘查任务中VR交互平均4.5次杆屏交互平均7.75次,灭火任务中VR交互平均6.5次杆屏交互平均5.25次。T检验分析结果显示(50)= –7.75,=0.028<0.05,说明数据具备显著对比差异性。通过实验统计(见图5)结果分析发现,虚拟现实交互环境出错率明显低于传统交互,灭火任务中虚拟现实交互的错误率略高于传统交互,回看对比视频记录结果分析发现,VR交互模式任务1和任务2中用户出错基本都出现在行驶阶段(绕桩时撞桩)和瞄准阶段,灭火任务中大概率出错位点为需要精确驾驶绕桩,搜索和照射操作出现错误概率低。传统杆屏交互在需要精确驾驶和瞄准的操作中,操作的精确度明显高于虚拟现实交互。说明RCUSV虚拟现实控制交互对转动视野、观察等模糊操作有更好的适配性,对诸如瞄准和精确转向等需要精确度的操作还不够细腻。
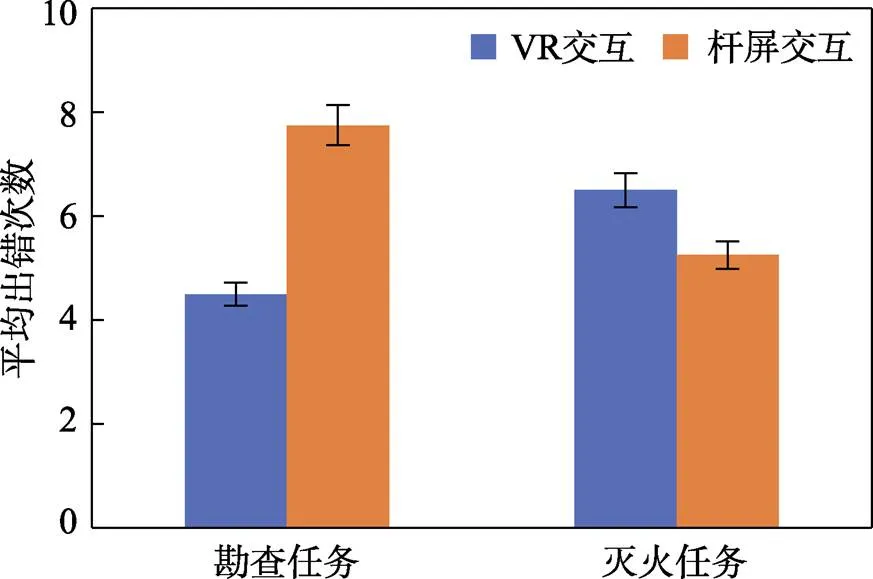
图5 平均出错次数
2)任务完成时间。在平均完成时间上(见图6),勘查任务中VR交互平均耗时33.60 s,杆屏交互平均耗时38.92 s,均小于理论耗时为42.45 s;灭火任务中VR交互平均耗时16.01 s,杆屏交互平均耗时17.88 s,同样均小于理论耗时为17.95 s。T检验分析结果显示(50)= –6.03,=0.021<0.05,数据具备显著对比差异性。虚拟现实环境下所有的操作时间都小于传统环境,所以说明VR环境的整体交互作业效率更高。但是,灭火任务中平均时间的差距并不显著,主要是由于需要精确操作的驾驶和瞄准任务较多,延长了VR交互环境的作业时间。全部作业任务的实验耗时都小于eGOMS模型理论耗时。对每位被试的测试视频和访谈记录分析发现,测试开始后,被试不需要很多心理准备时间(M)的次数,且由于熟悉校准过程热身和专家用户属性,被试对RCUSV操作映射不需要进行过多心理准备。
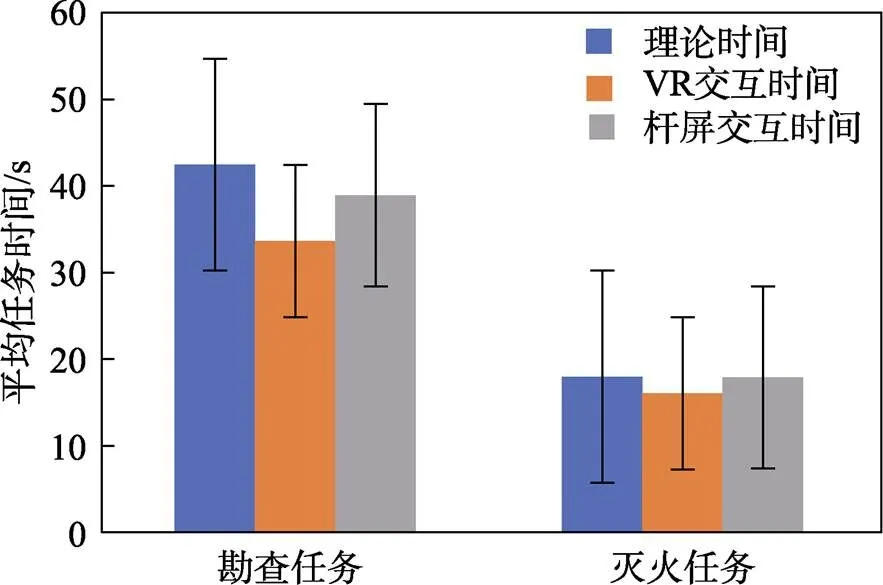
图6 平均作业时间
4.2 NASA–TLX问卷和访谈结果分析
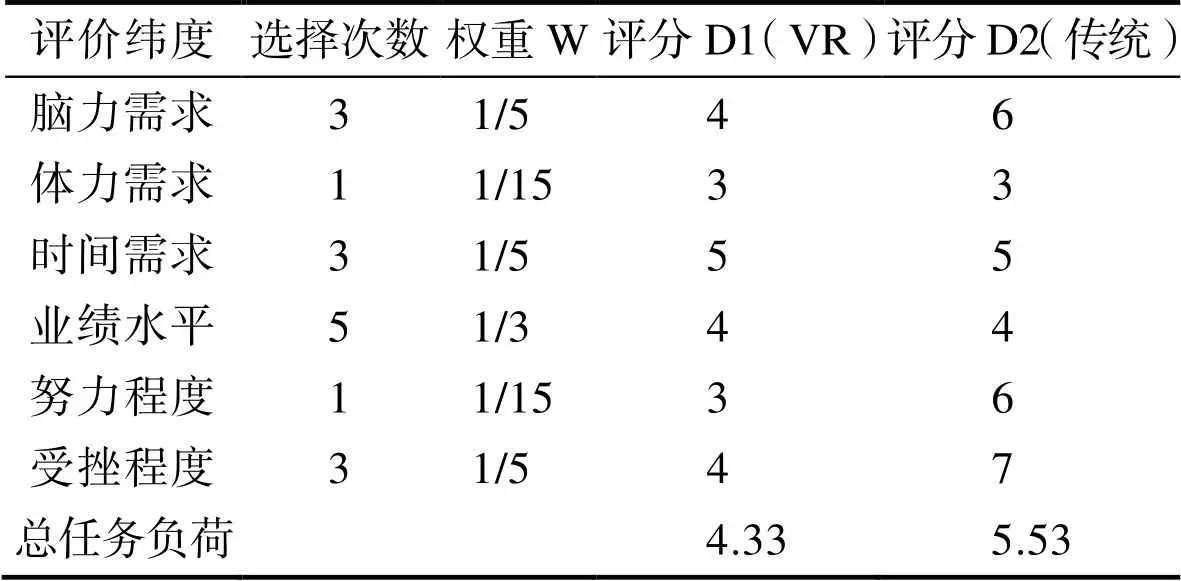
在实验完成后,被试者使用NASA–TLX问卷与访谈法对RCUSV交互主观感受打分评价。首先对NASA–TLX中六个维度进行双元重要性选择,根据被试者的选择结果得出维度权重,然后计算所有维度的加权平均值,求和得出总脑负荷。举例被试U1数据展示,U1对两种交互方式的评分D打分,根据其选择的权重W。通过计算公式计算获得U1脑负荷整体评分结果,见表4。
表4 U1认知负荷量表评分结果
Tab.4 Results of U1 cognitive load scale score
使用相同方法得出所有用户脑负荷的平均结果。所有用户的NASA–TLX平均评分VR交互环境为4.33,传统交互环境为5.53,实验结果说明使用VR交互控制方式执行任务对被试者造成的驾驶负荷远小于传统操作交互方式,脑力负荷相对较低,传统控制交互方式的脑力负荷较高。
5 讨论
研究采用eGOMS模型和NASA-TLX量表的方法,综合主客观因素,对不同场景下的RCUSV交互操作流程进行分析。使用RoboMaster平台设计两种交互环境,综合任务绩效、问卷数据发现。
1)着重优化VR交互中的指向操作过程可以有效提升用户体验。通过对2个任务的eGOMS模型理论数据和实验测试结果对比分析,发现实验交互中,K交互较少,P交互更多,而P交互的单位时间又长于K交互的单位时间,所以在RCUSV交互框架开发设计中,应当着重优化指向交互中的操作优化,以达到优质体验和高效交互的目的。优化指向操作可以从三点出发,第一是优化指向交互的速度,通过适当提高指向的速度,提高交互的效率,但是需要避免过快的速度降低指向的精度;第二是优化指向交互硬件跟踪的精度,通过过程记录发现造成指向P时间长的原因之一是动作捕捉精度不足,现有硬件的原始灵敏度是远远超过交互需要的,但是如何找到适合人自然交互的调整后精度,则需要通过大量的用户测试数据继续完善;第三是优化交互中人体活动与机械自由度的映射方式,使用户可以直接凭借已有的动作直觉来控制机械的运动,合理高效的映射可以充分发挥自然交互的优势。
2)eGOMS相应的基本操作典型值应当进一步准确标定。在针对RCUSV的虚拟现实测试中,主观脑负荷数据和客观任务绩效实验数据的对比结果倾向相同,但具体耗时有显著性差异。传统交互环境下勘查驾驶过程和灭火瞄准过程的实际操作时间远小于预期时间。根据访谈结果发现,造成这种现象的原因是,被试均为专家用户,用户已经有熟悉的RCUSV视野环境与运动规律认知预期,专家用户的各种标定值都小于模型理论值。然而这并不影响VR交互的作业效率比传统交互方式有显著提高。同时,用户在结束后的访谈里表示更希望能够融合部分传统杆式遥控的交互方式。这是因为被试用户已经具有了较长时间的杆式遥控经验,对这种方式更为熟悉,这符合用户倾向保持对已有认知结构的一致性,进而选择自身习惯事物[20-21]。VR交互方式对新手用户的学习成本低的优势更明显。
3)eGOMS模型中心理准备M的插入原则需要修正。所有RCUSV虚拟现实交互的实际操作时间都小于eGOMS 模型预测时间。结合访谈记录结果分析,被试由于是专家用户,对RCUSV作业环境与特性有预先建设,实际M的单位时间和频次应低于理论值。建议可以在行驶K前面不插入M,在观察指向P前面不插入M。
6 结语
RCUSV逐渐进入各行各业,亟待在遥控交互的各个方面优化提升,确保其作业效率,降低错误风险,提高用户的满意度。本研究基于eGOMS任务分析与NASA–TLX脑负荷量表,构件了一种主、客观综合评价方法,对虚拟现实下交互方式和传统交互方式的交互流程进行测试并展开实验,为RCUSV交互的优化提供了相关理论依据。研究结果呈现出的改进方向将促进RCUSV在国防、消防、安保、勘探等行业中的普及与高效应用,同时拓展RCUSV的应用领域和用户群边界,提升RCUSV的应用水平,极大地降低高危岗位人员的作业风险,为我国无人特种车辆行业的深入研究发展提供理论依据和实践借鉴。
[1] 张凤军, 戴国忠, 彭晓兰. 虚拟现实的人机交互综述[J]. 中国科学: 信息科学, 2016, 46(12): 1711-1736.
ZHANG Feng-jun, DAI Guo-zhong, PENG Xiao-lan. A Survey on Human-Computer Interaction in Virtual Reality[J]. Scientia Sinica (Informationis), 2016, 46(12): 1711-1736.
[2] 王宏安, 戴国忠. 自然人机交互技术[J]. 中国图象图形学报, 2010, 15(7): 980.
WANG Hong-an, DAI Guo-zhong. Natural Man-Machine Interaction Technology[J]. Journal of Image and Graphics, 2010, 15(7): 980.
[3] BOLTON M L, BASS E J, SIMINICEANU R I. Generating Phenotypical Erroneous Human Behavior to Evaluate Human-Automation Interaction Using Model Checking[J]. International Journal of Human Computer Studies, 2012, 70(11): 888-906.
[4] 姚寿文, 丁佳, 王瑀, 等. 坦克车辆虚拟远程驾驶技术综述[J]. 兵器装备工程学报, 2019, 40(6): 104-108.
YAO Shou-wen, DING Jia, WANG Yu, et al. Research and Prospect of Virtual Remote Driving Technology for Tank Vehicles[J]. Journal of Ordnance Equipment Engineering, 2019, 40(6): 104-108.
[5] David E Kieras. Towards a Practical GOMS Model Methodology for User Interface Design[M]. Amsterdam: Elsevier B.V., 1988.
[6] HUESMANN L R, CARD S K, MORAN T P, et al. The Psychology of Human-Computer Interaction[J]. The American Journal of Psychology, 1984, 97(4): 625.
[7] SAITWAL H, XUAN Feng, MUHAMMAD Walji, et al. Assessing Performance of an Electronic Health Record (EHR) Using Cognitive Task Analysis[J]. International Journal of Medical Informatics, 2010, 79(7): 501-506.
[8] KIERAS D. GOMS Models for Task Analysis[J]. The Handbook of Task Analysis for Human-Computer Interaction, 2004(1): 83-117.
[9] 王传龙. 基于GOMS模型之手持设备操作系统的人机交互界面研究——以iOS通话界面为例[D]. 武汉: 武汉纺织大学, 2013.
WANG Chuan-long. Research on User Interfaces of Handheld Devices′ Operation Systems Based on GOMS Model —According to the iOS Call Interface[D]. Wuhan: Wuhan Textile University, 2013.
[10] 李翔. 基于BHR-GOMS行为模型的汽车人机交互界面操作绩效研究[J]. 设计艺术研究, 2011, 1(6): 57-61.
LI Xiang. On Man-Machine Interface Operation Performance of Vehicles Based on BHR-GOMS Model[J]. Design Research, 2011, 1(6): 57-61.
[11] 杨海波, 汪洋, 张磊. 人机交互的GOMS模型与EPIC模型的比较[J]. 包装工程, 2015, 36(8): 96-99.
YANG Hai-bo, WANG Yang, ZHANG Lei. Comparison of Human-Computer Interaction Model of GOMS and EPIC[J]. Packaging Engineering, 2015, 36(8): 96-99.
[12] 王晖, 戴国忠, 禤宇明, 等. 虚拟现实人机交互的eGOMS模型研究[J]. 华中科技大学学报(自然科学版), 2005, 33(S1): 322-325.
WANG Hui, DAI Guo-zhong, XUAN Yu-ming, et al. Study of eGOMS Model for Human Computer Interaction in VR[J]. Journal of Huazhong University of Science and Technology, 2005, 33(S1): 322-325.
[13] 王晖, 戴国忠. 笔式用户界面的eGOMS模型研究(英文)[J]. 系统仿真学报, 2006(S1): 427-429.
WANG Hui, DAI Guo-zhong. Study of eGOMS Model for Pen-Based User Interface[J]. Journal of System Simulation, 2006(S1): 427-429.
[14] 孙晓东, 金晓萍, 解芳, 等. 多模态告警和认知负荷对装甲车辆乘员反应的影响[J/OL]. 兵工学报, 2022: 1-9[2022-07-19]. https://kns.cnki.net/kcms/detail/11.2176. TJ.20220718.1829.018.html.
SUN Xiao-dong, JIN Xiao-ping, XIE Fang, et al. The Effect of Multimodal Warning and Cognitive Load on the Response of Armored Vehicle Occupants[J/OL]. Acta Armamentarii, 2022: 1-9[2022-07-19]. https://kns. cnki.net/kcms/detail/11.2176.TJ.20220718.1829.018.html.
[15] 陈巧芬. 认知负荷理论及其发展[J]. 现代教育技术, 2007, 17(9): 16-19.
CHEN Qiao-fen. Cognitive Load Theory and Its Development[J]. Modern Educational Technology, 2007, 17(9): 16-19, 15.
[16] 徐小萍, 吕健, 金昱潼, 等. 用户认知驱动的VR自然交互认知负荷研究[J]. 计算机应用研究, 2020, 37(7): 1958-1963.
XU Xiao-ping, LYU Jian, JIN Yu-tong, et al. Research on Natural Interactive Cognitive Load of Virtual Reality Driven by User Cognition[J]. Application Research of Computers, 2020, 37(7): 1958-1963.
[17] 林琳. 基于认知负荷理论的虚拟仿真培训系统设计[D]. 大庆: 东北石油大学, 2012.
LIN Lin. Design of the Virtual Simulation Training System Based on Cognitive Load Theory[D]. Daqing: Northeast Petroleum University, 2012.
[18] 李文今, 侯文君, 秦宪刚, 等. 基于认知理论的B2C网站信息架构评估模型研究[J]. 北京邮电大学学报(社会科学版), 2017, 19(2): 39-43.
LI Wen-jin, HOU Wen-jun, QIN Xian-gang, et al. Information Architecture Evaluation Model of B2C Website Based on Cognitive Theory[J]. Journal of Beijing University of Posts and Telecommunications (Social Sciences Edition), 2017, 19(2): 39-43.
[19] 李炯, 汪文勇, 缪静. GOMS模型在考试登分系统中的应用研究[J]. 计算机科学, 2005, 32(4): 219-220.
LI Jiong, WANG Wen-yong, MIAO Jing. Research on the Application of GOMS Model in a Score-Entry System[J]. Computer Science, 2005, 32(4): 219-220.
[20] SIMON H. Management Behavior: A Study on the Decision-making Process of Management Organiza- tion[M]. Beijing: Beijing School of Economics Press, 1988.
[21] 苏畅, 周垚, 袁晓芳. 基于GOMS模型的网上购物流程设计优化研究[J]. 包装工程, 2021, 42(6): 113-119.
SU Chang, ZHOU Yao, YUAN Xiao-fang. Design and Optimization of Online Shopping Process Based on GOMS Model[J]. Packaging Engineering, 2021, 42(6): 113-119.
Interaction Design of Remote-controlled Unmanned Special Vehicles Based on Virtual Reality
QIAN Xiao-song1, YANG Jian-ming2, ZHU Te2
(1. University of Science and Technology Beijing, Beijing 100083, China; 2. Beijing Institute of Technology, Beijing 100081, China)
The work aims to explore the interaction paradigm of remote-controlled unmanned special vehicles (RCUSVs) under virtual reality, and finally improve the working efficiency and user experience of RCUSVs. The interaction process of RCUSVs in a virtual reality scene and a real scene was modeled by eGOMS model, and a stimulated test was organized. The results of user performance and user evaluation were generally consistent with prediction, showing that virtual reality interaction was more advantageous. However, the stimulated test results showed that whether it was a virtual reality or real scene, the interaction operation time predicted by the eGOMS model was greater than the actual interaction operation time of the user. The results of NASA-TLX questionnaires indicated that virtual reality can effectively improve the user experience and operational efficiency of RCUSVs. The study further revealed that the calibration and insertion rules in the eGOMS model need to be updated appropriately for expert users. Virtual reality will effectively improve the operational efficiency of RCUSVs, greatly reduce operational risks, and thus promote the popularization and application of RCUSVs in firefighting, rescue and disaster relief, national defense, and other fields.
remote-controlled unmanned special vehicle; virtual reality; interaction design; eGOMS model
TB472
A
1001-3563(2022)24-0001-07
10.19554/j.cnki.1001-3563.2022.24.01
2022–9–13
钱晓松(1983—),男,博士,特聘副教授,主要研究方向为交互设计、用户体验设计、产品设计以及设计思维。
朱特(1991—),男,博士,助理研究员,主要研究方向为特种装备工业设计、特种装备交互设计和评价方法。
责任编辑:陈作
