玉米免耕播种机播深实时监测系统设计与试验研究
2022-12-22付彦涛雷得超金厚熙李东洋任守华
付彦涛,雷得超,金厚熙,李东洋,任守华
(黑龙江八一农垦大学信息与电气工程学院,大庆 163319)
播种是农业生产中的重要组成部分,随着精准农业的不断推广,精密播种技术已应用于多种作物的种植,对农作物增产、农民增收和降低农作物生产成本具有关键作用[1-3]。玉米的精密播种是科学种植玉米的关键环节,其重要作用通过各个国家的农业实践得到了充分验证,是提高玉米产量的一项重要科学手段[4-5]。作为评估播种机性能的重要指标,播种深度是否稳定对玉米的出苗、作物生长以及粮食的最终产量都会产生很大影响。在保护性耕作条件下,免耕播种机在覆盖残茬的地表播种时,播种深度的稳定性将受到较大影响[6-7]。且当作业机车配带免耕播种机在松软、潮湿的土壤或土壤比阻比较大的地块上耕作时,由于耕深和阻力变化比较大,发动机的负荷不稳定,耕深会不均匀,耕作质量达不到农艺要求[8-9]。和平牧场位于黑龙江农垦西部,风沙、干旱、盐碱地覆盖的松嫩平原中部地带[10],土壤质地多样化、降雨量少,春播季节风力较为强劲,蒸腾作用大[11]。为切实解决传统耕作方法所造成的水土流失严重、沙尘暴肆虐、生态环境恶劣等问题,和平牧场地区正在大力推广具有显著社会、经济和生态效应的保护性耕作技术。免耕播种机作为保护性耕作技术实施的配套机具,其使用性能将直接影响着保护性耕作技术的应用[12-13]。
播种深度是开沟器开沟、土壤回流和覆土轮镇压共同作用的结果,人工不易测量,现有测量方法均是在忽略种子落土弹跳的条件下,将播种单体开沟深度作为种子播种深度[14-15]。在设计本监测系统时,通过文献查阅以及后续田间试验的开展,综合整理玉米播种深度稳定性的影响因素[16-17]。综合考量玉米播种深度的多种测量技术方法之后,提出一种基于拉线式位移传感器的玉米播种机播深检测的方法。设计并制定播深检测装置硬件电路以及播深检测软件的流程,研究并设计播种机播种深度实时监控系统后,通过开展田间播深监测评价试验并进行数据分析,进一步对系统功能进行完善[18-19]。通过拉线式位移传感器对机架与仿形轮间的相对位移进行检测,从而判断开沟深浅。经处理后的数据通过无线传输方式对实时播深数据进行传送,最终在驾驶室内的主控机显示屏实时显示。有效检测种子播深,能较好地控制种子发芽率、出苗率,提高种子出苗整齐度,发挥群体增产优势[20],进而提高农产品的产量,完全满足实际生产需求。针对玉米免耕播种机播深实时监测系统所进行的研究,在实现玉米精密播种、实现保护性耕作的过程中有着重要而广泛的应用空间。另一方面,智能农业装备技术作为我国发展现代农业的重要支撑,怎样实现播种机作业过程的智能监测是实现现代农业的首要问题,也是实现智慧农业的重要基础[21]。
1 播深实时监测系统设计
1.1 实验对象及主要技术参数
本研究选用吉林省大元农用机械有限公司生产的2BMZF-2型免耕指夹式精量施肥播种机作为试验平台,该型号播种机可一次完成开沟、施肥、播种、覆土、镇压等工序。整机结构如图1所示。

图1 2BMZF-2型指夹式免耕播种机Fig.1 BMZF-2 Finer clip no tillage till planter
2BMZF-2型免耕指夹式精量施肥播种机采用机械牵引式结构,配套22-37KW牵引机车,整机由牵引梁、机架、施肥机构、秸秆和杂草清理机构、排种机构、仿形整形机构、镇压轮、仿形轮、地轮、传动机构等部分组成,外观尺寸2 900 mm×2 050 mm×1 480 mm,由两部单体组成,作业速度6~8 km·h-1,该机采用进口指夹式排种器,适用于玉米秸秆全覆盖免耕播种、留茬地块免耕播种和常规播种,一次进地完成侧深施肥,种床整形,圆盘开沟,单粒播种,覆土重镇压等作业。2BMZF-2型免耕指夹式精量施肥播种机在实际作业中采用机械式播深控制装置,通过人工调节仿形轮限位机构的方式预设播种深度参数,因此在机具运行时无法随时观测播种深度,为了解决以上问题,依据仿形轮与机具相对位置的变化量来反映实时播种深度的原理,设计了播深采集装置,能有效解决实时播深数据采集的问题。
1.2 播深测量原理
通过拉线式位移传感器对仿形轮与机架间相对位移进行检测,所得到的开沟深度即为播种深度,传感器安装位置图如下图2所示。

图2 WXY31型拉线式位移传感器安装位置图Fig.2 Installation position of WXY31 pull wire displacement sensor
播种深度测量原理示意图如下图3所示。

图3 播深测量Fig.3 Principle diagrams of sowing depth measurement
在图3中有如下关系:

式中:L—仿形轮中心点到机架边缘的距离,cm;
R—播种机仿形轮的半径记为,cm;
△L—是传感器所检测到的播种机机架与仿形轮的相对位移,cm;
H—机架边缘到开沟器的相对距离,cm;
h—播种作业深度的初始值,cm;
h′—播种深度,cm;
△h—仿形轮受力变形量和覆土厚度带来的播种深度补偿量,cm。
播种机单体作业过程中,仿形轮胎面形变和种上覆土会影响播深测量准确性,其中,种上覆土厚度可通过调节覆土轮对地压力来改变,对装置试验发现,在设定相同覆土压力情况下,覆土厚度基本不变,而仿形轮胎面因其自身材质及土壤相互作用,作业过程中形变较小。因△h与地块土壤特性有关,为保证测量准确性,可通过作业前进行田间取样标定来获得△h。在上述变量已知的情况下,测量仿形轮与机架间相对位移即可求得播种深度h′。
1.3 系统组成及功能
播深实时监测系统分为人机交互模块、播深信息采集模块、报警单元和无线通信模块四个部分,系统组成如图4所示。
各部分实现功能如下:
(1)人机交互模块:在玉米播种作业之前,用于先行设置玉米种植的播深作业参数。显示机车作业行进的速度以及作业面积、播种量、播种深度、株距等作业信息。警报启动后显示故障信息。
(2)播深信息采集模块:选用WXY31型拉线式位移传感器,将传感器安装于播种机机架与仿形轮之间,安装位置如图4所示。当液压传动装置将播种单体抬升离开地面时为系统初始化状态,记录初始数值,按照播种单体下落程度确定播深。机车行进时,仿形轮与机架间产生相对位移,微处理器将测量的实时播深数据通过无线传输模块传输至车载计算机进行实时显示。

图4 系统构成图Fig.4 System composition diagram
(3)报警单元:当检测到的播种深度与播种之前所设定的要求不相符合时,声光报警器将发出警报。
(4)无线通信系统:无线通信模块连接控制器和上位机,用于传送该系统上位机给定的播深设定结果以及下位机所检测到的实际播种深度等数据。
1.4 硬件设计原理
播种深度监测装置的硬件电路原理如图5所示。在机车作业过程中,拉线式位移传感器采集到播种机的开沟作业深度,获得播深数据的模拟信号。滤波电路把采集到的模拟信号先进行滤波处理,再传送至主控芯片。当播种深度与之前所设定的要求不相符合时,声光报警器将发出警报。同时,微处理器将测量的播深数据通过无线通信模块传输至车载计算机实时显示并对玉米播种作业的完成情况予以评价,以便进一步实现更为精密的播种作业。

图5 下位机系统组成框图Fig.5 Composition block diagram of lower computer system
1.5 软件流程
所制定的实时监测系统软件流程如图6所示。下位机主要实现的是检测并处理传感器传出的模拟信号,包括对数据的有效性进行逻辑判断的功能和向上位机传送数据的通信功能。开始部分包括初始化程序,重点是检测拉线的初始状态是否在原始位置上,以保证系统能够正常运行。

图6 播深检测软件流程图Fig.6 Depth detection software flow chart
1.6 通信协议
采集数据共有2个节点,为了确保上位机能及时的收到下位机发送的数据,在上位机安装了两个通信模块,一个用于发送指令,地址为01;一个用于接收数据,地址为100。系统中下位机地址为10和20,在通信协议中分为两种通信格式,一是上位机向下位机发出的命令,二是下位机向上位机返回的数据信息或状态信息。
上位机向下位发送指令共4个字节,数据通信格式如表1所示。

表1 上位机向下位机发送的指令格式Table 1 Instruction format sent by upper computer to lower computer
下位机向上位机返回的指令共6个字节,数据通信格式如表2所示,其中第四、第五字节分别表示播深数值的整数部分和小数部分。

表2 下位机向上位机返回的指令格式Table 2 Instruction format returned from lower computer to upper computer
2 试验与结果分析
播深监测系统在实验室设计完成并测试后,于2021年春播季节开展田间试验,试验地位于大庆市大同区和平牧场东风管理区。试验样地上玉米经收获后,存在大量秸秆残茬,地表略有起伏,留茬适中。
结合试验样地土壤墒情及形状,任意选取2行作业垄,每行选取100米共计200个测试点,开展三次试验。为测试不同速度下各单体行播种深度监测效果,沿拖拉机前进方向分4段递增车速,调节并设定种深55 mm,实际作业中,控制各段地块拖拉机速度分别为5、6、7 8 km·h-1。试验前,先行通过田间取样标定来获得Δh,并在试验前旋转播深调节机构,保持调节播深一致。在玉米播种作业以后,使用自制的测量工具,采集并记录下播种深度的相关数据,经过计算分析后,最终得到播种的合格率以及播种深度的变异系数等相关的评价参数。与播深监测系统上位机所记录的播种深度数据进行对比,检验两份数据之间存在的差异是否显著,并做进一步深入探讨分析,逐步完善该监测系统的功能。

图7 田间试验Fig.7 Field experiment
采用手动方式设置播种机播深限位器至55 mm,在不同作业速度下进行播种操作,随机选取每行25个采集点记录系统检测数据,同时记录人工测量数据,第一行和第二行实测数据如表3、表4所示。

表3 第一行不同作业速度下播种深度测量值与人工检测值Table 3 Measured values of sowing depth and manual detection values under different operating speeds

表4 第二行不同作业速度下播种深度测量值与人工检测值Table 4 Measured values of sowing depth and manual detection values under different operating speeds
从表3、表4中可以看出,相比播种深度监测值,实际测量获得数值波动较大,整体布局相对分散,可能与种沟完整程度以及地表残茬厚度带来的人为测量不稳定性有关。对播种深度检测值和实际值数据的统计处理结果如表5所示。其中,播种深度合格率的相对误差最大值为24.32%,所以认定该系统有效率在75%以上。
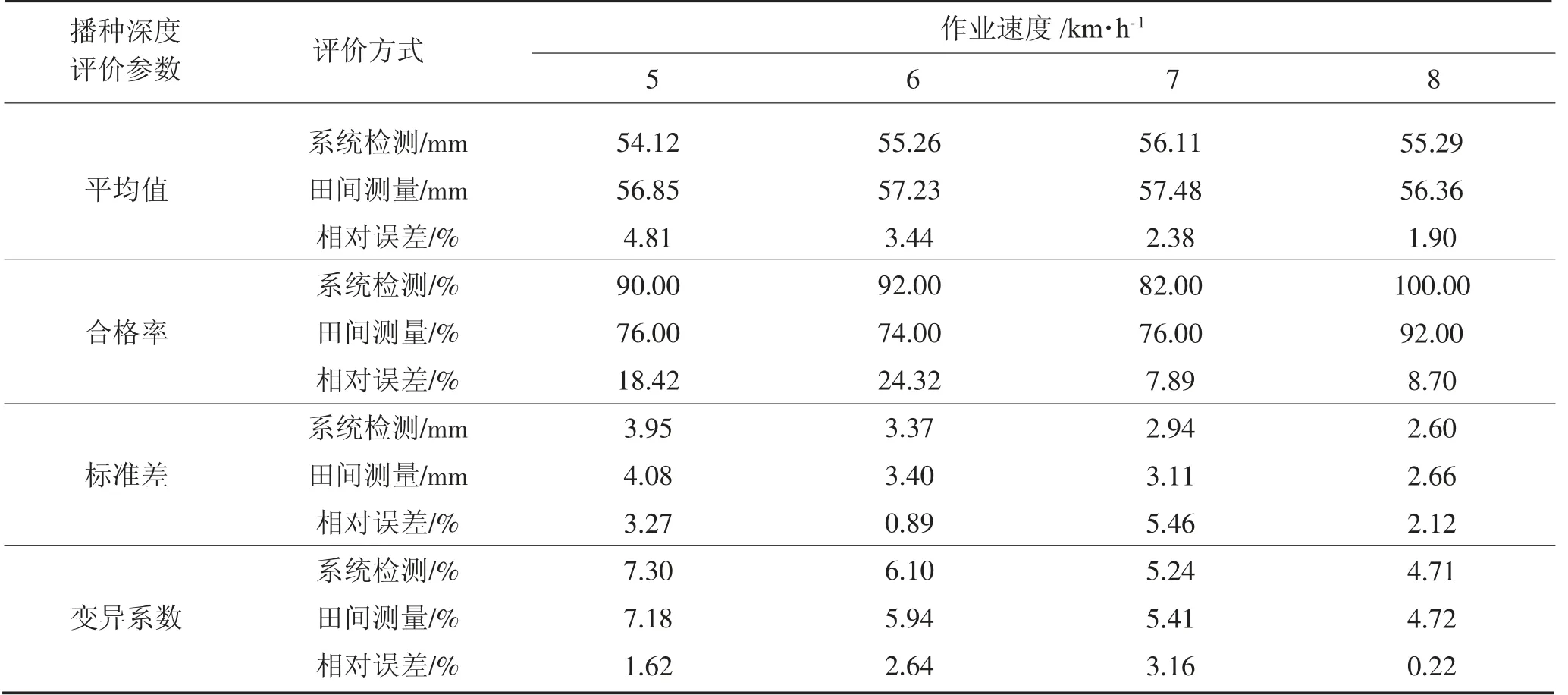
表5 不同作业速度下播种深度测量Table 5 Field experiment results
3 讨论
采用拉线式位移传感器来检测仿行轮与机架间相对位移进而获取播种深度的方法,很好地解决了免耕播种机具运行时无法随时观测播种深度的问题,同时通过信号传递,可将播深数据及播种评价结果即时显示。
在播深监测方面的众多研究中,流行的监测系统主要分为机械式报警器、机电信号式报警器和电子仪器式监视装置等三种。考虑到播种深度测量的精度需求,为减小残茬、光照等因素的影响,现有研究多采用接触式测量方法,其主要是通过测量机具上仿形部件偏转位移得到开沟深度。其中,包括研制监测播种排种株距均匀性和漏播、重播的电子仪器;研制将机械结构与集成电路相结合用来监视播种作业工况的电子监视精密播种机;检测开沟器和后置仿形轮的相对距离,通过计算得到开沟深度;使用角度传感器测量小麦的播种深度;用电位器式传感器检测开沟深浅。分析发现,测量仿形轮与机架间相对位移(即开沟深度)的方式则更直接。前文所述播深监测系统也正是在以往检测播种机开沟深度作为播种深度的基础上所进行的改良,与其他方法获得播种深度相较而言,改良后的操作方法更为便捷直观,适用也更为广泛,最重要的是拉线式位移传感器能够很好地适应复杂的作业环境,易于安装与维护,利于试验研究。
在开展试验验证系统功能的过程中需要注意这样一些问题:(1)对播种深度进行人工测量的操作过程要认真细致,尽可能减少测量所带来的误差。(2)监测系统对数据采集的时间节点以及时间间隔的掌控是否满足系统要求。(3)对试验数据更为直观呈现的处理方式的深层次逐步探索。
基于以上几点问题的考虑,提出以下几点关于进一步开展研究的建议:(1)制作人工播深检测手提装置,可在垄间提行的钢构框架和红外测距仪的结合,使得人工测量较大程度减少误差。(2)根据作业播种机排种口实际高度设定播深数据采集的时间间隔t秒。设定监测系统在光敏传感器检测到种子下落后t秒后开始采集拉线式位移传感器检测到的数据,其中,要根据自由落体运动规律计算好种子下落时间,以防数据检测不完全,对结果造成影响。(3)在综合考量机车作业速度、地块区间差异和人工测量误差等综合误差的同时,应进一步研究如何让监测系统更好地实现对播种深度的监测评价功能。
为了开发性能优良的播种机具,很多学者一直致力于精密播种机的基础理论和试验研究,注重关键部件的理论和整机试验研究,所研制的各类精密播种机具在农业生产中得到广泛应用。面向未来,关于精密播种的研究和推广的技术水平将越来越高,而使用监测数据,并依据行业标准进一步对播种深度进行现场评价是有着更为广泛的实际应用价值。在实现播深实时监测的基础上,应逐步探索播深的控制研究,使精密播种理论得到进一步的发展。
4 结论
(1)设计并构建一种玉米免耕播种机播深实时监测系统并进行试验研究,该监测系统采用拉线式位移传感器检测仿行轮与机架间相对位移来获取播种深度的方法来采集播种深度的数据,避免了复杂作业环境对播深监测的干扰。
(2)播深监测评价系统可实时显示各播种单体行的播深数值,同时,上位机也可以根据播种之前所设定的播种深度标准,实现对该作业地块播种作业状况的评价,为后续播种提供参考,以便于更好决策。
(3)玉米播种深度监测的试验表明,在作业机车不同作业的车速下,系统监测的各项数据,平均播深、合格率、标准差和变异系数的最大值分别为56.11 mm、100.00%、3.95 mm和7.3%,几项作业指标的相对误差分别处于1.9%~4.81%、7.89%~24.32%、0.89%~5.46%和0.22%~3.16%之间,免耕播种机播深实时监测系统实现了对玉米播种深度的监测功能。
