基于光纤传感的交通隧道内道路病害检测方法
2022-12-21罗宗伦
罗宗伦
(贵州桥梁建设集团有限责任公司,贵州 贵阳 558000)
0 引言
交通隧道在运营的过程中,由于地质环境缓变、环境温湿度周期性变化、来往行驶车辆长期碾压等因素,道路路面出现如坑洼、裂缝、凹陷等病害是难以避免的,如果不进行及时处理,会导致路面破损加剧,影响行车安全[1]。道路病害监测一般采用人工现场巡检方法,该方法存在成本高、效率低等不足之处。随着城市的建设和发展,交通公路的里程不断增长,人工现场巡检方法已经不能满足当前道路病害检测工作的要求,国内外研究者开始利用图像处理技术进行道路病害数据的分析。当前基于图像处理技术的道路病害检测系统普遍面临的瓶颈在于需要处理的数据量巨大、数据分析耗时较长。因此,道路病害检测在大多数情况下仍然采用人工巡检与图像自动识别结合,甚至依赖人工现场巡检的方式[2-5]。而对于隧道内的交通道路,由于隧道内光线昏暗,不同于常规场景,更增加了视频图像分析的难度。基于以上考虑,该文利用分布式光纤传感技术在交通公路隧道内构建振动探测网络,通过在隧道路面下方布设振动传感光缆,对车辆碾压路面产生的振动进行采集和分析,评估车辆行驶振动信号是否存在异常,并对异常位置进行定位,作为交通隧道内道路病害的辅助判断检测方法。
1 数据分析
1.1 数据采集
选取一段实验路段,将单模光纤作为振动传感光缆,敷设于路面沿线下方,埋设方向与道路走向平行,将传感光缆接入光纤振动传感系统。在实验路段选择一处位置,人为制造一个凹陷坑,用以模拟道路病害情形,同时在另一处位置设置一个风机,模拟交通隧道内的机械运行振动干扰。实验车辆反复行驶碾压测试路段,光纤传感系统采集车辆碾压路面产生的振动信号,获得振动信号时间—空间矩阵,数据采集步骤如下:
(1)在整条光纤链路上,按照光纤距离将探测区域划分为多个相等长度的小段,每个小段作为一个监测单元,将探测区域等间距划分为多个探测单元,划分间距为1 m。
(2)各个探测单元分别采集和存储各自探测到的振动信号,采样率400 Hz。
(3)在一段时间内,将光纤链路中空间连续的多个探测单元采集的振动信号进行拼接,即:矩阵每列为一个探测单元的采集数据,按照各个探测单元的空间顺序,将每列数据进行拼接,得到这段时间内的全段振动信号矩阵,即得到光纤振动时间—空间数据图像矩阵。这个图像矩阵的横轴表示距离,纵轴表示时间。
图1为其中一组车行碾压测试所得的光纤振动时间—空间数据矩阵三维图像,数据时长为60 s。模拟道路病害情形的凹陷坑在约175 m的位置。可见车速基本为匀速行驶,在常规路面区域的信号振幅仍具有一定的波动性,邻近信号之间的波动幅度处在一定的数值范围之内。而当车辆碾压经过凹陷坑时,产生的振动信号相较于其邻近探测单元,信号振幅数值出现较大的跳变。同时,在600 m位置,开启风机,从图中可见明显的模拟机械振动干扰信号。
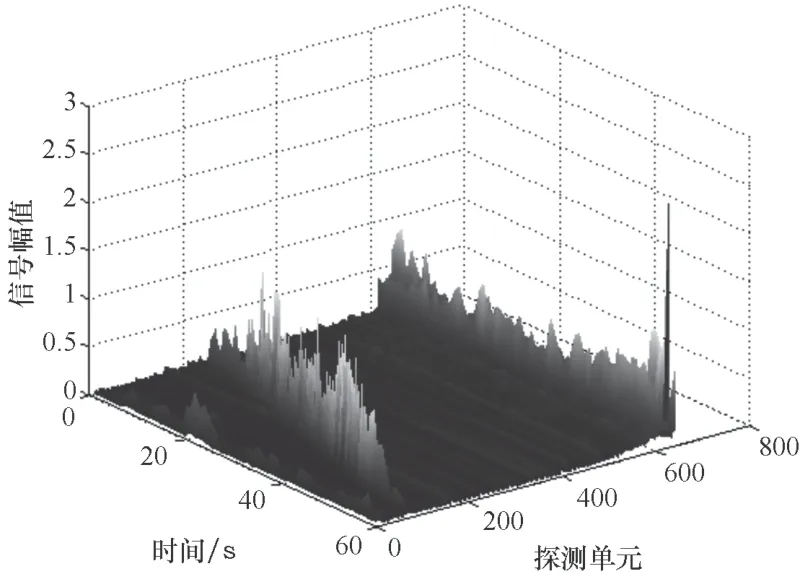
图1 模拟测试车行信号时间—空间数据
1.2 频谱对比
分别截取100 m位置和200 m位置的常规路面上车行碾压振动信号,以及175 m位置的车辆碾压凹陷坑产生的振动信号,进行频谱分析和对比。如图2(a)所示,100 m位置和200 m位置的常规路面车行信号,具有相似的频谱,其频谱主要集中在小于35 Hz范围,如图2(b)所示,175 m位置的车辆碾压凹陷坑产生振动信号,其频谱主要集中在1~80 Hz范围,如图2(c)所示,与常规路面车行信号的频谱分布存在较为明显的区别。
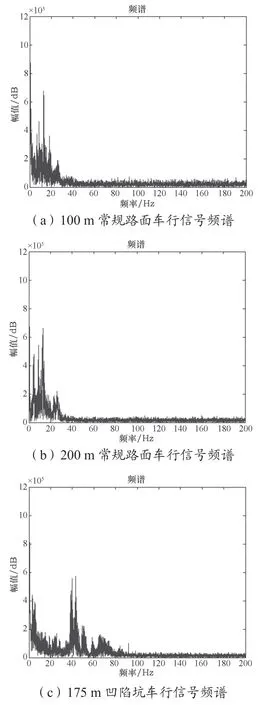
图2 常规路面和凹陷坑车行信号频谱对比
1.3 形态区分
考虑到交通公路隧道内可能存在的其他振动干扰,如风机运转产生的噪声、隧道内机电设备运转产生的振动等。为了对车辆行驶信号进行正确有效地提取,需要先对光纤振动时间—空间数据图像矩阵中的前景图块进行判断,找到符合车行振动信号形态特征的图块,然后根据这些图块涵盖的范围,提取各探测点采集的原始信号中的车行振动信号片段。如图3所示,观察光纤振动时间—空间数据图像中存在的多种激励振动信号,风机运转产生的噪声和隧道内机电设备运转产生的振动等干扰振动具有激励位置固定的特点,在光纤振动时间—空间数据图像中的形态为一条方向垂直的竖线,而车行信号由于车辆在隧道内基本以均匀速度行驶,在光纤振动时间—空间数据图像中的形态为一条具有斜率的直线,基于以上分析,车行信号判断方法如下:
(1)统计光纤振动时间—空间数据图像矩阵的中位值作为分割阈值,对图像矩阵进行二值化处理,提取前景部分。
(2)对前景部分做霍夫变换,查找并提取图像中的直线区域。
(3)对前景部分做连通域分割,得到多个独立的图块。
(4)根据图像中直线的斜率,排除方向为垂直或水平的线段,对于余下的斜率符合条件的直线段,其所涵盖的图块,认为是符合车行信号特征的激励图块。在图3中,绘制的直线段为找到的符合车行信号特征的信号,绘制的虚线段为应当排除的干扰信号,可见准确地找到了模拟机械干扰的位置。
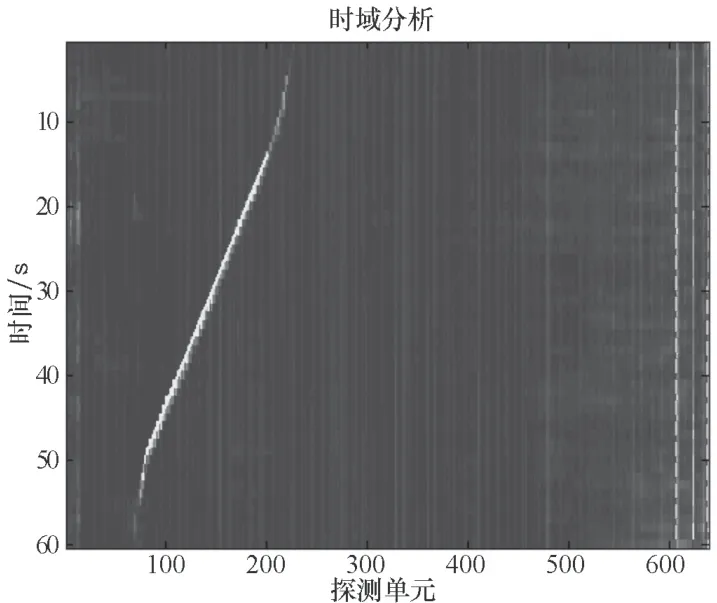
图3 车行信号和干扰信号判断结果
1.4 算法设计
根据以上分析,通过对时域信号振幅的跳变点以及信号频谱主频变化的综合分析,可以对道路病害进行判断。设计道路病害判断方法如下:
(1)已经找出图像中由斜线覆盖的区域,认为是符合车行信号特征的激励图块,分别对其涵盖区域的振动信号进行提取。
(2)对于每一个符合车行信号特征的激励图块,对于其中涵盖的每一个探测单元,分别提取处于激励信号图块中的原始振动数据片段。
(3)对提取的每一段车行振动数据做fft变换,得到对应的车行振动数据片段频谱,同时查找这段车行振动数据的振幅绝对值的最大值,记为车行振动幅值。
(4)对于第三步中得到的一系列探测单元的多个频谱,分别查找幅值最大值所对应的频率,记为相应探测单元的主频。
(5)对从同一激励图块得到的主频序列进行光滑样条拟合,得到该激励图块的主频序列的包络趋势线。
(6)计算各个探测单元主频与其对应位置包络线数值的差值绝对值,再求得此差值绝对值序列的均值,再计算差值绝对值序列与其均值的比值,设置比值阈值为T1,查找是否存在比值超过阈值T1的探测单元。
(7)对于第三步中得到的一系列探测单元的多个车行振动幅值,也进行光滑样条拟合,得到该激励图块的车行振动幅值序列的包络趋势线。
(8)计算各个探测单元车行振动幅值与其对应位置包络线数值的差值绝对值,再求得此差值绝对值序列的均值,再计算差值绝对值序列与其均值的比值,设置比值阈值为T2,查找是否存在比值超过阈值T2的探测单元。
(9)若存在主频比值超过阈值T1,同时车行振动幅值比值超过阈值T2的探测单元,则其对应的异常分值自增1。
(10)当某探测单元的异常分值达到阈值T_score,则对应位置被认为存在道路病害的情况。
(11)对于判断为存在道路病害的探测单元,系统发送对应位置的道路病害报警信息,同时将其位置信息推送给视频联动系统,进行图像复核。
2 测试统计
该次实验中,分别控制平均车速30 km/h、40 km/h、50 km/h、60 km/h,在实验路段各自进行了50组车行碾压凹陷坑测试,识别定位结果统计如表1所示。
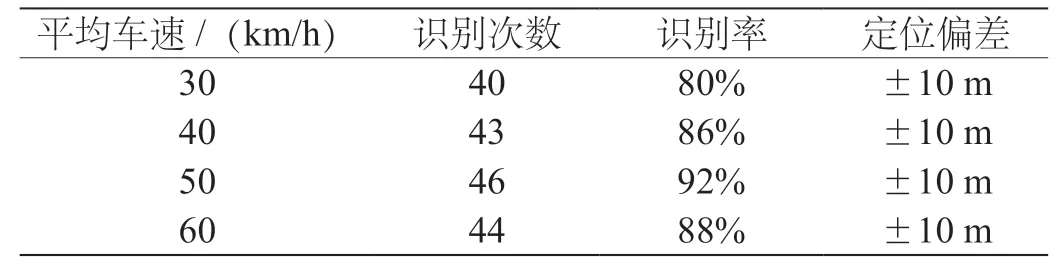
表1 减速带位置识别定位结果统计
由凹陷坑位置识别定位统计结果可知,在不同的平均车速下,算法对道路路面病害的识别率≥80%,定位偏差≤10 m。当平均车速为50 km/h,识别率可达92%。而其他无凹陷坑的位置,没有出现误识别情况。该文所提出的基于光纤振动传感的道路病害辅助检测方法,能够有效识别和准确定位道路路面出现的坑洼凹陷等病害情况。
3 结束语
该文基于分布式光纤传感系统构建隧道内的路面振动探测网络,对车辆碾压路面产生的振动进行采集和分析,评估车辆行驶振动信号是否存在异常,并对异常位置进行定位,作为对交通隧道内道路病害的辅助判断检测方法。通过分析比较平整路面的车行振动数据和病害位置的车行振动数据,针对病害位置振动信号出现的时域和频域的异常突变进行算法设计,由模拟测试统计结果,该文提出的方法能够准确检测路面凹陷引起的异常振动,定位偏差≤10 m,能够有效识别和准确定位道路病害情况,提供能够针对具体位置的道路病害报警信息,作为图像复核检测的参考依据,极大地减少视频图像处理的计算量,有效提高交通隧道的道路运维管理水平。
