基于新型伸缩因子的PMSM模糊自适应反步控制
2022-12-21金爱娟高文强李少龙卢泰宇武韬
金爱娟,高文强,李少龙,卢泰宇,武韬
基于新型伸缩因子的PMSM模糊自适应反步控制
金爱娟,高文强,李少龙,卢泰宇,武韬
(上海理工大学,上海 200093)
为了解决包装机驱动控制系统在非线性因素的影响下,工作效率和产品质量大大降低的问题,提出一种基于新型伸缩因子的模糊自适应反步控制策略。在传统自适应反步控制算法的基础上加入转速误差积分值对电流进行补偿,引入积分重置环节防止积分饱和引起调速时的超调和振荡,设计一种新的变论域伸缩因子,优化模糊推理模块,以在线整定转速反馈增益和自适应增益。通过MATLAB/SIMULINK仿真结果表明,改进后的控制器通过对交轴电流值进行补偿,使参数摄动对系统的影响大大降低,并根据转速误差及其变化率自适应调整增益,进一步提高了控制系统的转速动态响应性能。与常规传统PID控制系统和未优化的反步控制系统相比,文中优化后的控制器能增强被控系统的稳定性,缩短速度响应时间,具有更优的鲁棒性和动静态性能。
永磁同步电机;自适应反步控制;积分重置;伸缩因子;模糊推理
随着先进制造业的快速发展以及中国制造2025的到来,智能化和自动化将成为制造企业追求的目标,包装生产过程的效率也在工业生产中更加重要[1]。电机作为自动化包装机械的核心部分,其性能的好坏直接影响着控制系统的可靠性与产品的质量。永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其具有结构简单紧凑、低损耗高效率、高力矩惯量比等优点,被广泛应用于自动化包装器械和工业流水线生产等领域。然而,PMSM具有多参数、强耦合、非线性的特性,在实际工作时,电机内部固有参数以及外部负载不断变化,在当前对转速跟踪实时性以及系统鲁棒性要求较高的包装生产领域,传统的比例-积分-微分(Proportion Integration Differentiation,PID)控制方法已经很难满足其要求[2]。影响包装机械及自动化生产线的扰动因素主要包括2种:一种是电机工作时,环境变化和电机内部结构的磨损老化造成电机固定参数的改变,使得机械结构发生尖端抖动和共振,从而限制速度的快速响应,严重时甚至会造成金属疲劳,损坏包装机械;另一种是由于外部负载变化给系统增加了额外的扭矩振荡,降低了系统的控制精度,无法精确跟踪给定信号,最终导致控制系统的不稳定,降低包装产业的生产效率。
为了解决上述不利因素带来的影响,近年来国内外学者对非线性控制深入研究,提出了一系列新的研究成果,例如:模型预测控制[3]、反馈线性化控制[4]、滑模控制[5]和反步控制[6]等。其中,反步控制是上世纪90年代初Kokotovic等[7]提出的以Lyapunov稳定性理论为基础的控制方法。因其易与自适应参数相结合的特性,能实现PMSM的完全解耦,简化了设计过程,不仅为非线性控制器的设计提供了一种可行的思路,也在电机控制领域引起了研究学者的广泛关注[8-13]。王家军等[8]基于反步法设计控制器,相较于传统PID减少了调参数目并具有较快的动态响应,但降低了静态性能。Cai等[9]将自适应反步控制(Adaptive Backstepping Control,ABC)应用于非线性不确定系统,同时构造了自适应控制律,保证系统有稳定性的同时也有更好的动态性能。Chang等[10]将自适应反步控制应用于PMSM速度跟踪系统,速度响应时间大幅缩减,但未考虑参数摄动对系统的影响,拥有较大超调和振荡。张兴华等[11]对于参数不确定的PMSM控制系统,设计控制律和自适应律对电阻和外部负载在线估计整定,有效地抑制了参数变化的影响。Wang等[12]将智能算法与自适应反步控制算法结合,构成模糊自适应反步控制器(Fuzzy Adaptive BacksteppingController,FABC),通过模糊推理模块调整反步控制器的参数来改善动态性能。李洪兴[13]提出变论域模糊(Variable Universe Fuzzy,VUF)控制,对模糊控制进行优化,使其具备自适应调节能力,但论域伸缩因子的选择仍有限制。
对上述文献研究分析,为保证PMSM控制系统拥有较强的参数摄动鲁棒性能和优良的动态响应性能,满足包装行业的生产要求,提出一种改进的模糊自适应反步控制方法。在原有的反步控制律中对电机交轴电流进行实时补偿,并对引入的积分项设置积分重置环节,防止积分项过饱和带来过大的超调和振荡;此外,针对自适应反步法多参数不易调节的问题,文中设计一种新型变论域伸缩因子并作用于模糊推理模块,能够有效提高系统的转速动态响应性能。
1 永磁同步电机数学模型
文中以表贴式永磁同步电机为研究对象,并做如下假设:电机中的电流三相对称,铁芯无磁饱和现象,转子无阻尼缠绕,忽略电机磁滞和涡流损耗。永磁同步电机在旋转坐标系下的数学模型为[14]:

式中:u、u为定子电压的–轴分量;i、i为定子电流的–轴分量;L、L为–轴电感分量;s为定子电阻;p为极对数;为机械角速度;f为永磁体磁链。
因表贴式永磁同步电机L=L=,对式(1)作适当变换,可以得到:

永磁同步电机的电磁转矩表达式:

机械运动方程:

式中:e为电磁转矩;L为负载转矩;为转动惯量;为阻尼系数。
2 自适应反步控制器
在双闭环矢量控制的基础上,自适应反步控制器应运而生,系统的结构框图见图1,控制器已不再是传统PID控制器中的转速环和电流环,而是由参考自适应律和实际控制电压组成。

图1 系统结构框图
PMSM在实际运行中,其内部参数不完全固定,环境变化以及电机内部结构的磨损老化导致永磁体退磁、电机固有参数改变,外部负载转矩与惯性不匹配也会在控制系统中加大参数变化的不确定性[15]。这些不确定因素在设计系统时必须要考虑在内,否则控制系统将会与期望值不符,在控制精度要求较高的工作环境工作时甚至会造成严重事故。
根据反步法原理,永磁同步电机自适应反步控制器设计步骤如下:
1)定义参考速度*,则控制跟踪误差:



2)在轴参考电流中增加变量对给定的i进行补偿,在此基础上增加积分环节,可以大大增加PMSM的稳态特性[16]。重新引入虚拟控制量:
式中:k为转速误差积分增益;θ为转速跟踪误差积分值。
定义轴、轴电流跟踪误差为e,e:

再次定义Lyapunov函数:

式中:为自适应增益。
对Lyapunov函数式(10)求导,
式中:、k、k、k为非负数。

参考自适应律:
2.1 系统稳定性分析
定理:对于PMSM数学模型式(2),控制律式(12)和自适应律式(13),可以使得系统在运行过程中达到速度的全局渐近跟踪以及参数的全局一致收敛[17]。
证明:由式(10)可知,(,e,e)是正定的且有无穷上界,将控制律和自适应律代入式(11),可得:




式(16)恒成立,系统实现转速和电流的精确跟踪。
2.2 积分重置环节设计
补偿量的数学表达式是积分形式,引入抗饱和环节可以避免积分饱和的问题。但这样的话会多增加抗饱和系数,增大控制系统的复杂度,且该系数使用固定值也会限制控制效果。
文中在积分项的输出端引入一个限幅机构,防止积分项深度饱和引起系统严重的超调甚至发生振荡[18]。并对积分项设置一个积分重置环节见图2,给重置环节的清零触发机制设置一个阈值,当转速误差值在阈值内变化时,不启动该机制,防止短时间内系统所需积分值不够,引起系统抖动;当转速误差值在阈值外变化时,清零触发机制立即启动,将积分值清零重新累积,避免了前一时刻对当前时刻的影响,使补偿量更具实时性。

图2 积分重置环节
3 模糊自适应反步控制器
带积分项的自适应反步控制器为保证系统收敛,增益、k、k均为大于零的常数且固定不变,因此限制了整个控制系统的动态特性。对自适应反步控制研究发现,通过对转速误差及其变化率实时调整积分增益和自适应增益,便可以影响i*的值,从而改变控制输出u。
模糊自适应反步控制器输入输出的模糊子集均对应[负大,负中,负小,零,正小,正中,正大],即[NB,NM,NS,ZO,PS,PM,PB]。隶属度函数选取三角形式,的隶属度函数曲线见图3a和图3b,c和的曲线分别与和相同。其中,和c的论域为[−1,1],和的论域为[0,2]。
对于模糊规则的设计,既要保证响应速度的同时又要减小超调、振荡、消除静差,且当偏差及其变化率较小时,也应输出较小的控制量。表1和表2为建立的模糊规则:

图3 隶属度函数曲线
表1模糊规则
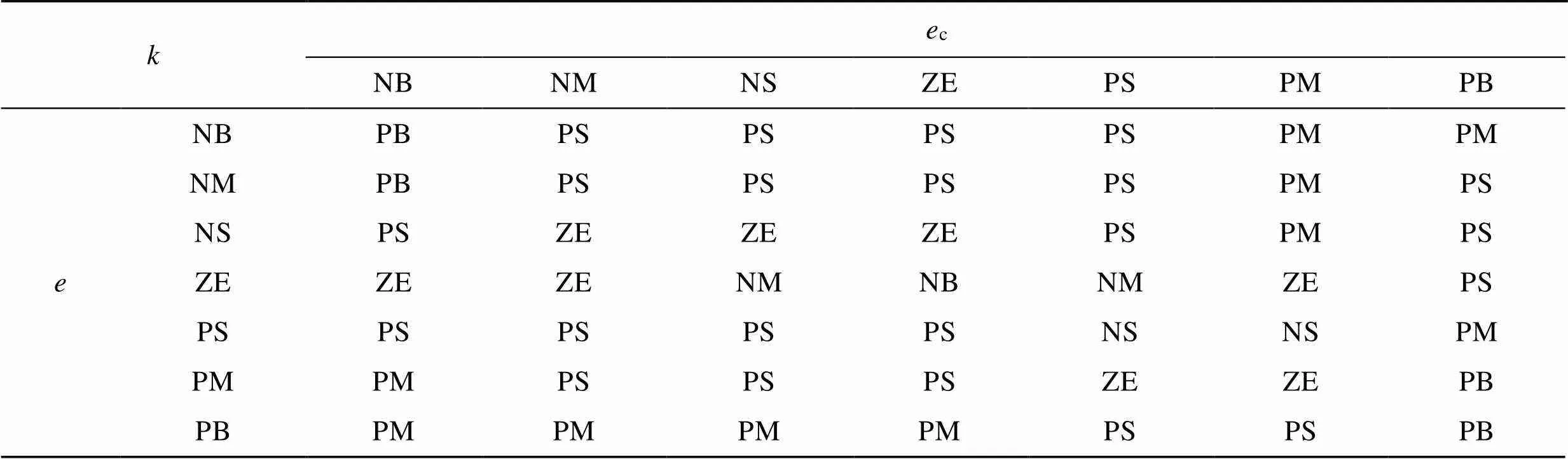
Tab.1 Fuzzy rules of k
表2模糊规则

Tab.2 Fuzzy rules of γ
3.1 变论域模糊自适应反步控制器
当论域大小选择不恰当时,模糊控制器的控制效果就难以保证。变论域模糊控制算法通过引入伸缩因子来在线调整输入输出量的论域范围[19]:根据输入c计算伸缩因子1、2、。其中1、2是输入变量、c的伸缩因子,是输出变量和共同的伸缩因子。基本原理见图4。

图4 变论域基本原理
3.2 新型伸缩因子设计


其中,>0且足够小,保证分母不为0。得到新型函数型伸缩因子为:

式中:充分小且大于0;1、2为输入变量、c的初始论域边界。
3.3 伸缩因子稳定性分析
伸缩因子具有稳定性才能保证系统稳定运行,从以下几个方面验证伸缩因子的稳定性。
1)对偶性。

1关于原点对称,论域伸缩调整比例也关于原点对称,满足对偶性。
2)单调性。

3)非零性。

误差为0时,伸缩因子不会收缩到零点,满足非零性。
4)协调性。
将式(18)改写成||关于1的函数


论域无论如何调整都不会超出初始论域范围,满足协调性。
5)正规性。
当取边界值−1或1时,可得:
保证了控制器初试采样偏差−1或1有意义,满足正规性。
同理可知2也满足稳定性。和取值大于0,初始论域选择为正向单侧论域,也以原点为收敛值进行比例调节。在式(18)中,由于是1和2的线性组合也易证其满足稳定性,因此,文中提出的新型伸缩因子1、2、均满足上述5个条件。
将改进的新型伸缩因子与之前提出的模糊自适应反步控制算法相结合,建立变论域模糊自适应反步控制器(Variable Universe Fuzzy Adaptive Backstepping Controller,VUF-ABC),结构流程见图5。
4 仿真实验分析
根据框图,用MATLAB/Simulink搭建相应的仿真模型。从2个方面对所改进的控制器进行分析。
1)变速仿真实验。电机以800 r/min额定转速启动,在0.08 s时给定转速降低至400 r/min,0.16 s时恢复至额定转速800 r/min,在0.24s时给定转速再次突降至600 r/min,以此来验证控制系统的动态性能。

图5 VUF–ABC控制系统流程
2)变载仿真实验。电机以恒定给定转速800 r/min转动,0.1 s时突加负载15 N∙m,在0.2 s时卸载,以此验证控制系统的抗扰动能力和鲁棒性能。
为了更好地验证变论域模糊自适应反步控制器(VUF–ABC)的优化效果,将其与传统PID控制器、自适应反步控制器(ABC)、模糊自适应反步控制器(FABC)进行实验数据对比,仿真采用的永磁同步电机主要参数见表3。
表3 PMSM模型参数

Tab.3 Parameters of PMSM
4.1 变速仿真实验
此次实验中,电机以阶跃给定转速分别空载和带载10 N∙m启动,速度给定如下:0~0.08 s速度给定800 r/min;0.08~0.16s速度给定400 r/min;0.16~0.24 s速度给定800 r/min;0.24~0.3s速度给定600 r/min。仿真结果见图6和图7,调节时间以转速误差值<0.2 r/min为标准,对在0 s时的加速段和0.08 s时的减速段进行分析,得到电机的性能指标见表4和表5。
表4为空载运行时各控制方式性能指标对比。通过表4数据和图6a的转速波形图可知,与传统PID控制方式相比,其他控制算法的动态性能均有所改善。传统PID控制在所取最优参数时超调仍然存在,不发生振荡,随后逐渐收敛至给定值。加速段和减速段动态性能相同。电磁转矩虽有较小的超调,但反应较慢;ABC和FABC在相同的控制方式下,加速段的转速超调量比传统PID分别降低了49.71%和80.29%,调节时间也缩短了5倍以上;减速段的转速超调量虽然和传统PID相差不多甚至略有增大,但调节时间大大减小,缩短了77%左右;VUF–ABC加速段的超调量几乎为0,减速段的超调量也比前3种较小;调节时间在加速段比传统PID缩短了82.93%,比次优的FABC也有12.4%的优势。观察图6b—6i的转矩局部图可以发现,加速或者减速时都会有转矩波动并在短时间内迅速恢复稳定,VUF-ABC对比其他方法,其转矩在受到负载转矩变动的情况下,能够更快地到达新的稳态,转矩抖动也是最小。综上分析可得,VUF–ABC稳态误差最小,转速跟踪最稳定,超调小,转矩反应快速,波形也更加平稳。
表4 空载变速仿真性能指标对比

Tab.4 Comparison of performance indicators in no-load variable speed
表5 负载变速仿真性能指标对比

Tab.5 Comparison of performance indicators in load variable speed

图6 空载变速实验仿真波形
表5为负载运行时各控制方式性能指标对比。可以看出,在负载变速时,传统PID无论超调量还是调节时间都是最大的,而VUF–ABC负载时加速段的超调可以达到最优,并且很快调节收敛稳定到给定值,减速段的超调量也降低了38.84%,调节时间也比收敛最快的FABC快了5.4%,稳态误差也是四者最小,具有最优的转速跟踪能力。
通过观察图6和图7,可以得出VUF–ABC下的PMSM控制系统无论空载还是负载运行时,在加速段和减速段的动态性能相比于前3种方式均有很大改善,超调量小,调节时间快,转速跟踪误差小,转矩反应快并且波形平稳,比其他3种控制方式拥有更好的动态性能和静态性能。
4.2 变载仿真实验
电机以恒定转速800 r/min空载启动,0.1 s时负载突加至15 N∙m,在0.2 s时负载突降至0。该实验仿真结果如下,性能指标见表6。

图7 负载变速实验仿真波形
表6 变载实验仿真性能指标对比

Tab.6 Comparison of variable load experimental performance indicators
结合表6计算的数据可知,除传统PID外其余的3种控制方式在负载突变时的转速扰动量和恢复时间都大大减小。与传统PID相比,在突加负载时,ABC和FABC转速受负载变化而引起的转速扰动量减小了36.55%和70.86%,恢复时间也大大缩小,具有较强的抗扰动性能。在突减负载时,ABC和FABC具有和突加负载时相同的动态性能,受负载扰动影响远远小于传统PID,恢复时间也快了88.58%和90.56%。对比前3种方式,VUF–ABC的转速扰动在突减负载时为所有控制方式中最小,比传统PID减小了89.33%,比次优的FABC也减小了3.7%,突加负载时的恢复时间虽然比FABC要长,但负载变化引起的扰动量小了1.591r/min,通过图8a的仿真波形也可以看出其稳定性更佳,也就说明了在遇到负载转矩突增或突减的情况下,VUF–ABC能够更快地恢复稳态。观察图8b—8i可以发现,VUF–ABC对比其他方法,其转矩在受到负载转矩变动的情况下,能够快速响应并达到新的稳态,转矩抖动也是最小。总体看来,VUF–ABC具有更好的抗扰动能力与鲁棒性。

图8 变载实验仿真波形
5 结语
文中对于PMSM控制系统中转速的快速响应以及抗扰动性能的提升提出了一种新的控制方式。通过改进的自适应积分反步控制方法,对电机交轴电流进行补偿并引入积分重置环节,减小了内部参数摄动对电流控制的影响,大大降低了控制器对系统模型精度的依赖。并且考虑到实际运行工况下外部复杂的扰动因素,设计新型变论域伸缩因子应用于模糊推理模块,对控制器参数实施进一步的在线整定。仿真结果表明,与传统PID、积分反步控制、模糊反步控制相比,文中提出的变论域模糊自适应反步控制具有更优的转速动态响应性能,对内部参数摄动和外部负载扰动有着较强的鲁棒性。
[1] 张坤平. 基于PLC的全自动在线式缠绕包装机控制系统设计[J]. 包装工程, 2021, 42(17): 270-275.
ZHANG Kun-ping. Design of the Control System of Full-Automatic On-Line Winding Packaging Machine Based on PLC[J]. Packaging Engineering, 2021, 42(17): 270-275.
[2] 刘晴, 曾喆昭, 方云熠, 等. 永磁同步电机的自学习滑模反步抗扰控制[J]. 控制工程, 2021, 28(1): 93-98.
LIU Qing, ZENG Zhe-zhao, FANG Yun-yi, et al. Self-Learning Backstepping Sliding Mode Control with Disturbance Rejection for Permanent Magnet Synchronous Motor[J]. Control Engineering of China, 2021, 28(1): 93-98.
[3] YUAN Xin, ZHANG Shuo, ZHANG Cheng-ning, et al. Improved Model Predictive Current Control for SPMSM Drives Using Current Update Mechanism[J]. IEEE Transactions on Industrial Electronics, 2021, 68(3): 1938-1948.
[4] AGHILI F. Optimal Feedback Linearization Control of Interior PM Synchronous Motors Subject to Time-Varying Operation Conditions Minimizing Power Loss[J]. IEEE Transactions on Industrial Electronics, 2018, 65(7): 5414-5421.
[5] JUNEJO A K, XU Wei, MU Chao-xu, et al. Adaptive Speed Control of PMSM Drive System Based a New Sliding-Mode Reaching Law[J]. IEEE Transactions on Power Electronics, 2020, 35(11): 12110-12121.
[6] 刘胜, 郭晓杰, 张兰勇. 六相永磁同步电机鲁棒自适应反步滑模容错控制[J]. 电机与控制学报, 2020, 24(5): 68-78.
LIU Sheng, GUO Xiao-jie, ZHANG Lan-yong. Robust Adaptive Backstepping Sliding Mode Control for Six-Phase PMSM System with Open Phases[J]. Electric Machines and Control, 2020, 24(5): 68-78.
[7] KOKOTOVIC P V, KRSTIC M, KANELLAKOPOULOS I. Backstepping to passivity: Recursive design of adaptive systems[C]// Proceedings of the 31st IEEE Conference on Decision and Control. Tucson, AZ, USA, IEEE, 1992: 3276-3280.
[8] 王家军, 赵光宙, 齐冬莲. 反推式控制在永磁同步电动机速度跟踪控制中的应用[J]. 中国电机工程学报, 2004, 24(8): 95-98.
WANG Jia-jun, ZHAO Guang-zhou, QI Dong-lian. Speed Tracking Control of Permanent Magnet Synchronous Motor with Backstepping[J]. Proceedings of the CSEE, 2004, 24(8): 95-98.
[9] CAI Jian-ping, WEN Chang-yun, SU Hong-ye, et al. Adaptive Backstepping Control for a Class of Nonlinear Systems with Non-Triangular Structural Uncertainties[J]. IEEE Transactions on Automatic Control, 2017, 62(10): 5220-5226.
[10] CHANG Wan-min, LI Yong-ming, TONG Shao-cheng. Adaptive Fuzzy Backstepping Tracking Control for Flexible Robotic Manipulator[J]. IEEE/CAA Journal of Automatica Sinica, 2021, 8(12): 1923-1930.
[11] 张兴华, 唐其太. 考虑参数和负载不确定性的内置式永磁同步电机自适应反步控制[J]. 控制与决策, 2016, 31(8): 1509-1512.
ZHANG Xing-hua, TANG Qi-tai. Adaptive Backstepping Control of Interior Permanent Magnet Synchronous Motors Considering Parameter and LoadUncertainties[J]. Control and Decision, 2016, 31(8): 1509-1512.
[12] WANG Wei-ran, TAN Fei, GE Hui-lin, et al. Adaptive Integral Backstepping Control of PMSM with Differential Terms Based on Parameters Fuzzy Self-tuning[J]. International Journal of Innovative Computing, Information and Control, 2019, 15(6): 2165-2181.
[13] 李洪兴. 变论域自适应模糊控制器[J]. 中国科学E辑: 技术科学, 1999, 29(1): 32-42.
LI Hong-xing. Variable Universe Adaptive Fuzzy Controller[J]. Science in China,SerE, 1999, 29(1): 32-42.
[14] LI Long-fei, XIAO Jie, ZHAO Yun, et al. Robust Position Anti-Interference Control for PMSM Servo System with Uncertain Disturbance[J]. CES Transactions on Electrical Machines and Systems, 2020, 4(2): 151-160.
[15] 王永祥, 周小杨, 张周焕, 等. 基于变参数矩阵PMSM无传感器控制[J]. 控制工程, 2021, 28(2): 345-353.
WANG Yong-xiang, ZHOU Xiao-yang, ZHANG Zhou-huan, et al. PMSM Sensorless Control Based on Variable Parameter Matrix[J]. Control Engineering of China, 2021, 28(2): 345-353.
[16] 杨启涯, 庄海, 张颖杰. 永磁同步电机积分反步自适应控制[J]. 电机与控制应用, 2018, 45(8): 15-18.
YANG Qi-ya, ZHUANG Hai, ZHANG Ying-jie. Integral Backstepping Adaptive Control of Permanent Magnet Synchronous Motor[J]. Electric Machines & Control Application, 2018, 45(8): 15-18.
[17] LI Tong, LIU Xu-dong, YU Hai-sheng. Backstepping Nonsingular Terminal Sliding Mode Control for PMSM With Finite-Time Disturbance Observer[J]. IEEE Access, 2021, 9: 135496-135507.
[18] HOU Qian-kang, DING Shi-hong. GPIO Based Super-Twisting Sliding Mode Control for PMSM[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(2): 747-751.
[19] 王宏涛, 蒋汶松, 蒋清泽, 等. 伸缩因子优化机械臂轨迹跟踪控制的误差分析[J]. 计量学报, 2020, 41(10): 1177-1183.
WANG Hong-tao, JIANG Wen-song, JIANG Qing-ze, et al. Error Analysis of OptimizingManipulatorTrajectoryTrackingControllerBasedonContraction-ExpansionFactor[J]. Acta Metrologica Sinica, 2020, 41(10): 1177-1183.
[20] ZHANG Hao, ZHANG Rui-jun, HE Qin, et al. Variable Universe Fuzzy Control of High-Speed Elevator Horizontal Vibration Based on Firefly Algorithm and Backpropagation Fuzzy Neural Network[J]. IEEE Access, 9: 57020-57032.
Fuzzy Adaptive Backstepping Control of PMSM Based on Novel Extension Factor
JIN Ai-juan, GAO Wen-qiang, LI Shao-long, LU Tai-yu, WU Tao
(University of Shanghai for Science and Technology, Shanghai 200093, China)
The work aims to propose a fuzzy adaptive backstepping control strategy based on a new expansion factor to solve the problem that the work efficiency and product quality of the drive control system of packaging machine are greatly reduced under the effects of nonlinear factors. Firstly, based on the traditional adaptive backstepping control algorithm, the integral value of speed error was added to compensate the current, and then the integral reset link was introduced to prevent the over-harmonic oscillation caused by integral saturation. In addition, a new variable universe expansion factor was designed to optimize the fuzzy reasoning module to adjust the speed feedback gain and adaptive gain online. MATLAB/SIMULINK simulation results showed that the improved controller greatly reduced the effects of parameter perturbation on the system by compensating the current value of the quadrature axis, and adaptively adjusted the gain according to the speed error and its change rate, which further improved the speed dynamic response performance of the control system. Compared with the conventional PID control system and the unoptimized backstepping control system, the optimized controller can improve the system stability and reduce the speed response time, and has better robustness and dynamic and static performance.
permanent magnet synchronous motor; adaptive backstepping control; integral reset; extension factor; fuzzy reasoning
TB486;TM341
A
1001-3563(2022)23-0277-12
10.19554/j.cnki.1001-3563.2022.23.033
2022−03−11
国家自然科学基金(11502145)
金爱娟(1972—),女,博士,副教授,硕导,主要研究方向为控制理论、电机及其控制、电力电子。
责任编辑:曾钰婵