一种增强型改进麻雀搜索算法的三维航迹规划
2022-12-19符强江伟纪元法任风华
符强, 江伟, 纪元法, 任风华
(1.桂林电子科技大学广西精密导航技术与应用重点实验室, 桂林 541004; 2.国家与地方卫星导航定位服务联合工程研究中心, 桂林 541004; 3.桂林电子科技大学信息与通信学院, 桂林 541004; 4.桂林电子科技大学电子工程与自动化学院, 桂林 541004)
无人机三维航迹规划是根据无人机的任务要求和飞行约束规划出一条全局最优的飞行路径,其本质可视为求解一个多约束的最优化问题。随着无人机的广泛应用,航迹规划问题已经成为广大学者们的研究热点,由于无人机的运动空间为三维,相比于二维空间,其算法的计算量和复杂度大大增加,为解决复杂环境下的无人机航迹规划问题,国内外学者对此进行了不同算法的研究与改进。
研究者们提出了许多算法,如A*算法[1]、RRT(rapidly exploring random trees)算法[2]、人工势场法[3]在无人机航迹规划中的应用,但这些算法在求解多约束的最优化问题时,容易陷入局部最优。研究者们通过对自然界生物种群进行分析,提出了群智能优化算法,如蚁群算法[4]、粒子群算法[5-6]、遗传算法[7-8]、灰狼优化算法[9]、鲸鱼优化算法[10]、人工蜂群算法[11-13]、蝙蝠算法[14]。文献[3]在传统人工势场法中加入了角度和速度调节因子,并引入避障力,实现了无人机在避障的同时平滑轨迹。文献[5]将天牛须搜索算法融合粒子群算法,解决了粒子群算法在迭代后期易陷入局部最优问题,但算法收敛速度有所降低。文献[7]通过自适应调节交叉算子和遗传算子的概率,从而获得全局最优解,但其生成的航迹转折点较多,轨迹不平滑。文献[12]通过在雇佣蜂中加入双重认知和权重因子,提高算法的全局搜索能力,在侦察蜂阶段,将局部极值点存入禁忌表中,但未考虑无人机飞行高度因素。
文献[15]于2020年根据麻雀觅食现象提出了麻雀搜索算法(sparrow search algorithm, SSA),相比于其他智能算法,麻雀搜索算法具有更好的收敛性能,因其控制参数较少,已被成功应用于实际工程中。文献[16]结合鸟群飞行思想将改进的麻雀搜索算法用于多阈值图像分割,文献[17]将麻雀搜索算法成功用于优化支持向量机的滚动轴承故障诊断。由于麻雀搜索算法同大多数群智能算法一样,在求解复杂问题时,容易陷入局部最优解,因此提出一种增强型改进麻雀搜索算法。首先利用Logistic-tent混沌序列对麻雀搜索算法进行初始化,增强种群初始位置的随机性,扩大算法搜索范围;其次在发现者-警戒者位置更新过程中引入动态自适应调整策略,加快算法的收敛速度,提高全局搜索能力;然后利用高斯-柯西变异产生新的麻雀个体并更新位置,解决算法陷入局部最优问题。最后通过选取11个测试函数及其他五种对比算法:鲸鱼优化算法(whale optimization algorithm, WOA)、灰狼优化算法(gray wolf optimization, GWO)、麻雀搜索算法(sparrow search algorithm, SSA)、混沌麻雀搜索优化算法(chaos sparrow optimization algorithm,CSSA)[18],文献[19]改进麻雀搜索算法(improved sparrow search algorithm, ISSA)验证增强型改进麻雀搜索算法(enhanced modified sparrow search algorithm, EMSSA)的有效性,并成功应用于无人机三维航迹规划问题。
1 麻雀搜索算法
麻雀搜索算法是一种新型群智能优化算法,其过程主要模拟了麻雀的觅食和反捕食行为。在麻雀觅食过程中,麻雀群体分为发现者和加入者,发现者是种群中适应度值较高的个体并为整个麻雀种群提供食物来源,加入者则根据发现者进行觅食。在觅食过程中,加入者会监控发现者并争夺食物资源,以此增加自己的捕食率。发现者位置更新描述为

(1)

加入者位置更新描述为
(2)
麻雀种群中会随机选取10%~20%的个体作为警戒者,其位置更新为
(3)
2 增强型改进麻雀搜索算法
2.1 Logistic-tent混沌映射
目前混沌序列已被众多学者用于群智能优化算法中,混沌序列具有随机性、遍历性和规律性的特点。通过混沌映射可以保持种群的多样性,防止算法陷入局部最优,改善全局搜索能力,提高算法的寻优精度。其中常用的混沌模型为Tent模型和Logistic模型,Logistic映射的迭代序列分布均匀性较差,如图1所示,当u=4时,分布才接近整个0~1区域,其映射的混沌序列主要分布在两端,而中间区域较少,导致算法易陷入局部最优,无法找到全局最优解。而Tent映射具有较好的混沌扰动特性,其概率密度更加均匀,因此采用Logistic-tent混沌序列初始化麻雀搜索算法种群,混沌映射表达式为
(4)

图1 Logistic 分叉图Fig.1 Logistic bifurcation diagram
式(4)中:xn为第n个混沌数,n为迭代次数,u为实数,u∈[0,4],mod表示取余,当u=4时,就转变为Logistic映射,由图2可知本文选用的混沌模型分布更加均匀,初始化麻雀搜索算法种群效果更佳。

图2 Logistic-tent 分叉图Fig.2 Logistic-tent bifurcation diagram
2.2 发现者-警戒者动态自适应调整
麻雀搜索算法能否找到最优解,很大程度取决于发现者的搜索能力。由于发现者在迭代初期就靠近全局最优解进行搜索,导致算法在迭代后期容易陷入局部极值,难以找到全局最优解,这种搜索方式降低了算法的寻优精度及收敛速度。在发现者位置更新中加入自适应权重系数w,其随着迭代次数的增加而自适应地减小,使得算法在整个搜索空间中具有较好的全局和局部搜索能力,提高寻优精度。改进自适应权重的发现者位置更新为

(5)

(6)
麻雀搜索算法在搜索过程中警戒者数量保持不变,为一个固定值,会导致算法收敛速度较慢,因此对警戒者数量进行控制。在算法运行初期,保持警戒者数量占种群数量的10%~20%,此时算法全局搜索能力强,在算法运行后期,随着迭代次数增加,警戒者数量线性减少,可以提高算法的收敛速度,警戒者数量变化公式为
num=floor[(1-t/Tmax)numinit]+1
(7)
式(7)中:numinit为警戒者初始值;num为警戒者数量;t为当前迭代次数;Tmax为最大迭代次数。
2.3 高斯-柯西变异策略
在算法迭代后期,麻雀个体会逐渐向最优位置靠近,这会导致种群多样性缺失,且算法容易过早收敛,使生成的最优解不具有普遍性。高斯变异具有很强的局部搜索能力,在算法迭代后期可以产生更快的收敛速度,而柯西变异具有较强的全局搜索能力,可以有效减少种群多样性的丢失。因此在算法迭代初期,利用柯西变异进行大范围搜索,增强算法的全局搜索性,在算法迭代后期,利用高斯变异进行局部探索。
当满足变异标准时,选取最优个体进行变异,比较变异前后个体的位置,如果变异后麻雀个体位置更佳,则替换原来的位置,否则保持不变。其变异方式为
(8)
(9)

2.4 EMSSA算法流程
为克服麻雀搜索算法的缺点,首先利用Logistic-tent混沌序列对麻雀种群进行初始化,增加种群多样性;其次在发现者-警戒者位置更新过程中引入了自适应权重系数,提高算法的寻优精度;最后在算法运行初期,利用柯西变异进行全局搜索,在迭代后期,利用高斯变异进行局部搜索,使算法摆脱局部最优解。增强型改进麻雀搜索算法其主要具体步骤如下所示。
步骤1设置算法相关的参数,包括种群数量,迭代次数,发现者占比等。
步骤2利用Logistic-tent混沌序列生成初始解,增加种群多样性。
步骤3计算初始种群中每个麻雀个体的适应度值,并记录当中的最优值和最优解。
步骤4根据发现者比例选取发现者数量,并将剩下个体作为加入者,根据式(2)、式(5)更新加入者和发现者位置信息。
步骤5随机选取10%~20%的麻雀作为警戒者,根据式(3)、式(7)更新其位置信息。
步骤6通过式(8)高斯-柯西变异产生N个新个体,计算所有个体适应度值并排序。
步骤7从种群中选取N个麻雀个体,比较变异前后个体的适应度值,若更优,则更新这些个体的位置,否则保持不变。
步骤8判断算法是否达到最大迭代次数,若是则输出最优解并结束,否则继续循环。
EMSSA算法流程图如图3所示。
3 基于EMSSA三维航迹规划
无人机航迹规划是在满足多约束条件下,从起点找到一条至终点的无碰撞的最优路径,即求解目标函数的最优值和最优解,只有通过建立合理的航迹规划模型和设计合理的航迹规划目标函数,才能保证航迹规划的效果最优。航迹规划算法规划出的初始航迹由许多航迹点组成,如果规划出的航迹点在同一条直线上,则无人机可以直接飞行,如果相邻航迹点之间的转弯角度较大,需要通过平滑处理保证无人机的飞行轨迹在空间中尽可能光滑。
3.1 无人机约束模型
3.1.1 最大航程约束
最大航程距离决定了无人机的空中作战及任务执行能力,当其他外在条件相同时,最大航程取决于无人机机载燃料,即无人机的续航时间越久,最大航程距离越大。假设无人机在航迹飞行过程中有n个航迹点,且相邻两个航点之间的距离为l,无人机的最大航程为Lmax,则无人机的总航程L应满足关系式

(10)
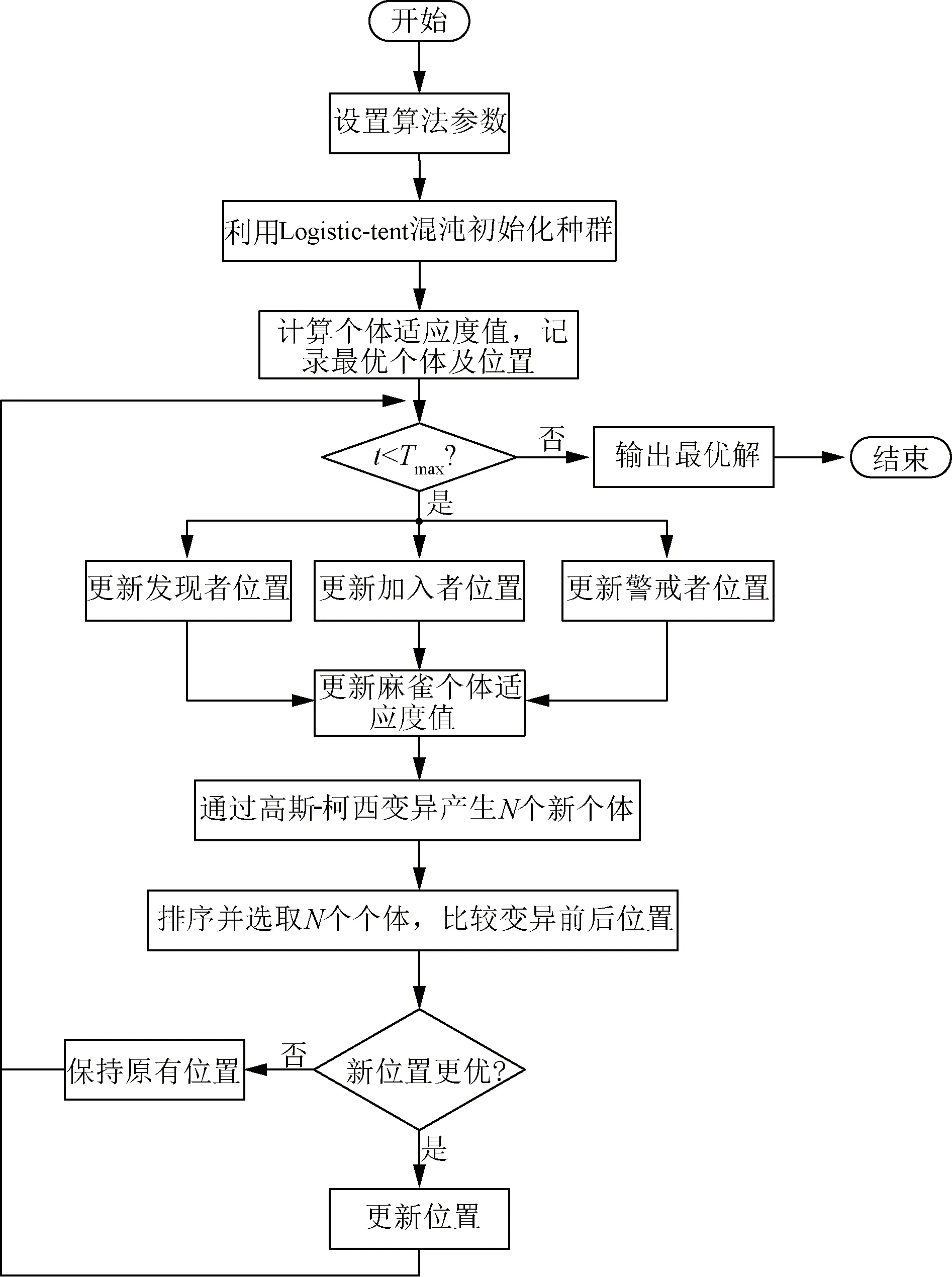
图3 EMSSA算法流程图Fig.3 EMSSA algorithm flow chart
3.1.2 最大爬升角约束
在三维空间中,相邻航迹点之间存在高度差,无人机从当前航点飞到下一个航点,需要进行高度的攀爬,攀爬过程中受到无人机的动力模型、飞行高度影响。攀爬角度不宜过大,否则可能会导致飞机失控,因此在无人机飞行过程中存在一个最大攀爬角度α,从航点(xi,yi,zi)到航点(xi+1,yi+1,zi+1)的最大爬升角为
i=1,2,…,n-1
(11)
3.1.3 最小转弯半径约束
当无人机改变航向时,由于自身惯性影响,需要相应的时间和转弯半径才能调整无人机到达期望航向,因此转弯半径ri必须满足ri≥rmin,才能实现正常的飞行。
3.1.4 最低飞行高度约束
当无人机在空中飞行时,离地面越低,碰撞地面障碍物的风险越大,因此需要设置一个最低飞行高度Hmin,保证无人机低空的安全飞行,受无人机本身性能影响,存在最大飞行高度Hmax,因此无人机的飞行高度约束为
Hmin≤Hi≤Hmax
(12)
3.2 环境威胁模型
3.2.1 雷达威胁
地面雷达可以探测出空中无人机的速度和位置信息并指引地面武器系统对其实施精准打击。雷达威胁如图4所示,当雷达在对外界物体进行探测时,假设其天线扫描角度为全方位扫描,设雷达探测到无人机时两者之间的距离为dR,则dR=cΔt/2,其中c为电磁波传播速度,Δt为时间间隔,受到目标反射截面积和发射天线功率的影响,雷达在探测过程中,其最大探测距离dR,max为

(13)
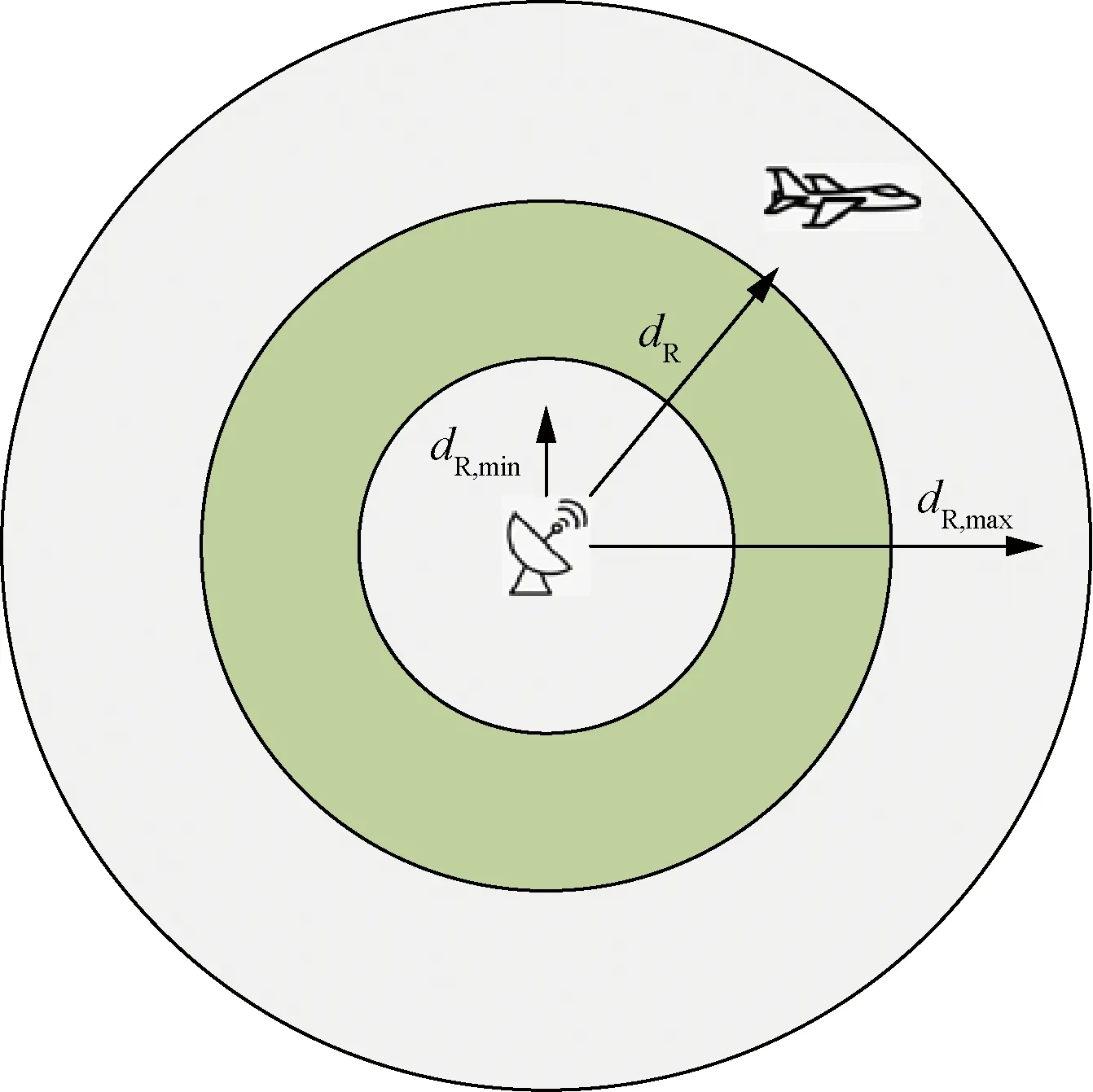
图4 雷达威胁模型Fig.4 Radar threat model
式(13)中:λ为雷达信号的工作波长;Pt为发射电磁波功率;G为发射天线增益;σ为目标反射截面积;Smin为接收机能检测到回波信号的最小功率。
当雷达可以进行全方位探测时,无人机被雷达探测到的概率PR为
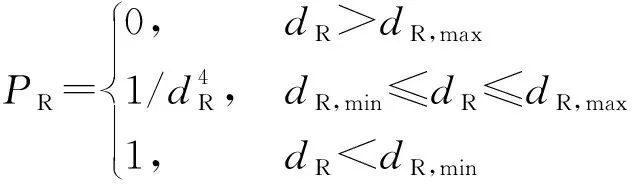
(14)
3.2.2 防空导弹威胁
地面防空导弹可进行全方位射击,其最远射击范围为dM,max,所对应的高度称为最大射击高度hmax,同时防空导弹存在一个最小射击距离,由其组成的射击范围是一个半径为dM,min的半球体,称dM,min为有效射击范围,在有效射击范围内,也存在一个高度,在此高度内,防空导弹可进行有效射击,此高度一般称为有效射击高度hmin,当无人机飞行高度越高,在有效射击范围内停留时间越短,被击中概率越低,防空导弹威胁模型如图5所示。

图5 防空导弹威胁模型Fig.5 Air defense missile threat model
设无人机与防空导弹之间的距离为dM,则无人机被防空导弹击中概率PM为
(15)
3.2.3 大气威胁
大气威胁如雷暴,台风等天气会影响无人机的安全飞行,容易使无人机发生严重颠簸,甚至出现坠机。本文中使用圆柱体表示大气威胁对无人机产生的影响,如图6所示,其中dC,max为大气威胁的最大半径,dC,min为大气威胁的最小半径,在此区域内的无人机被损坏的概率为1。设无人机与大气中心距离为dC,则无人机受到大气威胁概率PC为

(16)
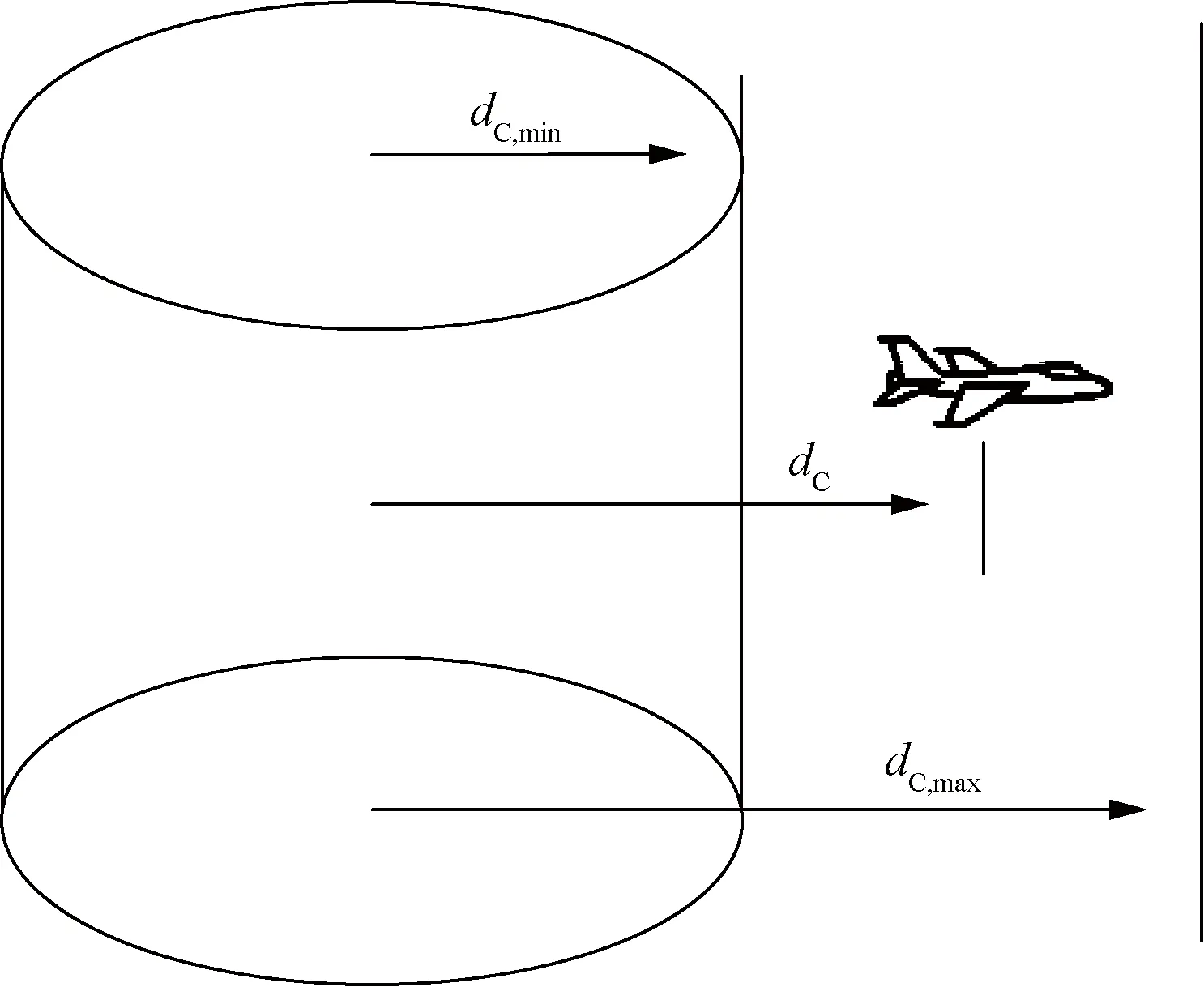
图6 大气威胁模型Fig.6 Atmospheric threat model
3.2.4 地形威胁
地形威胁表示无人机在飞行过程中可能会与地面山峰发生碰撞,为确保飞行安全,需要考虑地形威胁。建立山峰地形公式为
(17)
式(17)中:hi表示第i个山峰的峰顶值;(x,y)表示山峰在二维平面投影所对应的位置坐标;(x0i,yoi)表示第i个山峰顶点在二维平面位置坐标;Z(x,y)表示在(x,y)处的地形高度,(ai,bi)表示第i座山峰在X轴和Y轴的坡度量,当(ai,bi)值较大时,所对应的山峰坡度越小,地势相对越平坦。
3.3 目标函数
航迹规划目标函数由代价函数和约束函数组成,对约束的处理使用罚函数,将罚函数加入到原目标函数中,使有约束的最优化问题转换为无约束最优化问题。约束函数中的约束模型为地形威胁约束、雷达威胁约束、防空导弹威胁约束、大气威胁约束。公式为
J=Jcost+σCon
(18)
式(18)中:J为目标函数;Jcost为代价函数;σ为惩罚系数;Con为约束条件,满足约束条件其值为0,不满足则为1。无人机航迹规划代价函数的求解受无人机自身性能影响,在航迹规划时,应保证代价函数最小。本文设计的无人机航迹规划的代价函数为
Jcost=w1Jpath+w2Jheight+w3Jturn
(19)
式(19)中:Jcost为总的代价函数;Jpath为航迹长度代价函数;Jhight为无人机飞行高度代价函数;Jturn为无人机转弯角代价函数。参数wi为每个代价函数的权重,其和为1,即
(20)
无人机航迹长度在航迹规划中为主要考虑因素,其规划的航迹越短,就可以为无人机节省更多燃料、消耗更短的飞行时间,假设一条航线有n个飞行航点,分别为D1、D2、…、Dn,每两个相邻航路点距离为li,相邻两个航路点坐标为(xi,yi,zi)和(xi+1,yi+1,zi+1),航迹长度代价函数为
(21)
同时,稳定的飞行高度对无人机航迹规划也有着重要影响,无人机应当在保证不撞击山体的情况下,尽量降低飞行高度,这样可以借助山体增加隐蔽性,不易被地面雷达探测,提高无人机作战效率。飞行高度代价函数为

(22)
无人机的灵活性受最大转弯角和最小转弯半径影响,在飞行过程中,无人机的转弯角不应该超过设定的最大转弯角,转弯角代价函数为
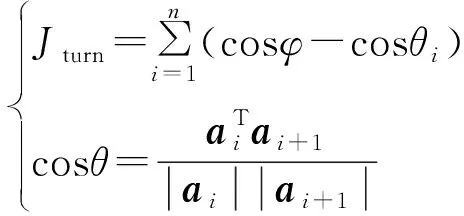
(23)
式(23)中:φ为最大转弯角;θi为当前飞行角度;ai为飞行路径中第i段的向量。
3.4 B样条平滑
B样条曲线是贝塞尔曲线的一般化形式,由于贝塞尔曲线的每个控制点都会影响整条曲线,而B样条曲线控制点只会影响部分曲线形状,可以对曲线的局部进行修改,因此采用B样条对无人机航迹进行平滑处理,B样条曲线基本定义为
(24)
式(24)中:Pi为控制点,控制点用于定义样条曲线的走向、界限范围;Bi,k(u)为第i个k阶B样条基函数,k≥1;u为自变量,基函数递推公式为
(25)
采用3次准均匀B样条曲线平滑航迹,如图7所示,确保无人机在空间中的运动较为平滑,更加符合无人机的自身飞行特性。

图7 B样条平滑轨迹Fig.7 B-spline smooth trajectory
3.5 EMSSA航迹规划算法实现
为解决无人机在三维空间中航迹规划时易陷入局部最优问题,将增强型改进麻雀搜索算法用于三维空间的无人机航迹规划问题求解,通过对目标函数进行寻优,进而求得三维空间中无人机最佳航迹。其中麻雀种群代表规划空间中所有可能出现的航迹,通过算法求解返回最优值和麻雀最优个体,最优值即为目标函数值,麻雀种群组成的最优个体即为规划航迹点。算法主要实现步骤如下。
(1)首先对三维地形环境进行建模,包括地形、雷达、防空导弹、大气威胁模型。
(2)初始化相关参数,输入起点和终点位置、导航控制点数量n、惩罚系数σ、权重系数ωi。
(3)根据建立的约束模型和代价函数设置目标函数值J。
(4)EMSSA算法运行。其中麻雀种群代表飞行航迹,根据式(18)比较所有航迹的目标函数值,并通过前文改进策略更新麻雀个体位置。输出目标函数最优值和麻雀最优个体。
(5)结合导航控制点和麻雀最优个体位置利用3次准均匀B样条对初始航迹进行平滑处理,输出最佳飞行轨迹。
4 实验仿真与分析
4.1 算法性能测试
为验证本文增强型改进麻雀搜索算法的有效性,选取了三组不同的测试函数,分别为单峰测试函数F1~F5如表1所示,多峰测试函数F6~F9如表2所示,固定维数测试函数F10~F11如表3所示。其中单峰测试函数只有一个极值点,可以用来测试算法的寻优精度和收敛速度;多峰测试函数具有多个局部极值点,利用此类测试函数可以验证算法的局部寻优能力;固定维数测试函数可以验证算法的综合性能,包括算法的寻优精度,收敛速度以及稳定性。

表1 单峰测试函数Table 1 Unimodal test functions
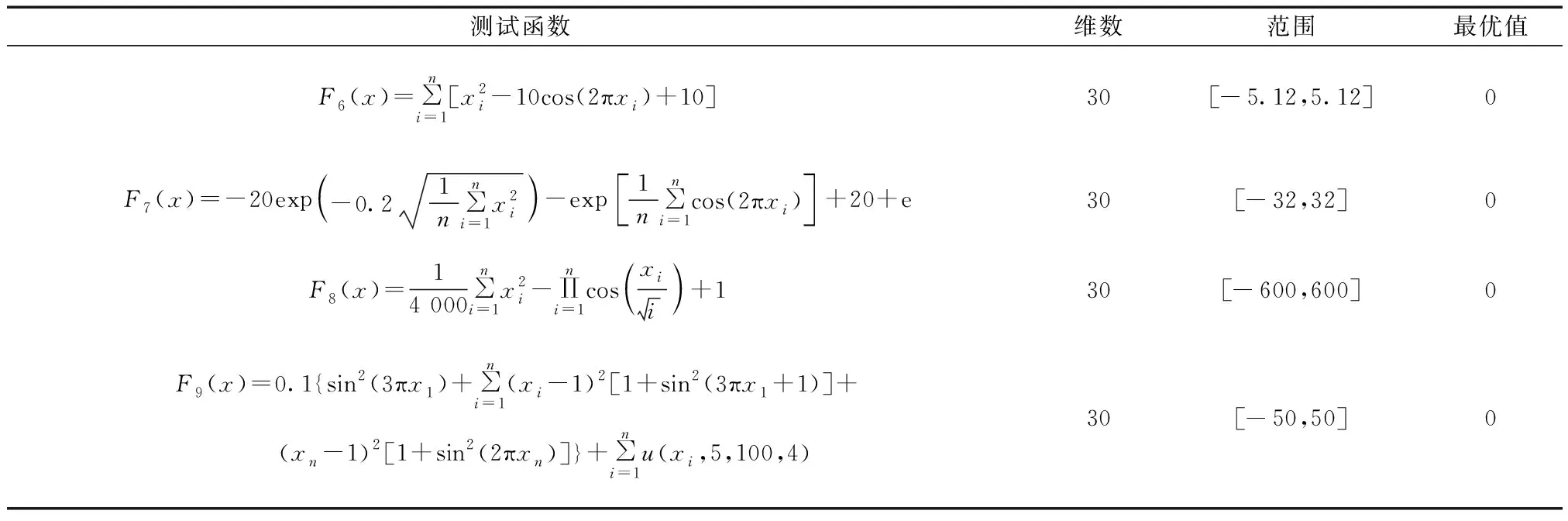
表2 多峰测试函数Table 2 Multimodal test functions

表3 固定维数测试函数Table 3 Fixed-dimension test functions
麻雀搜索算法同其他群智能算法一样,其搜索结果具有随机性,因此为了避免单次运行结果的误差,在三组实验中,分别运行30次,求其平均值、最优值和标准差,并选取WOA、GWO、SSA、CSSA、ISSA作为对比。
算法的参数设置如下:设置算法的种群数量为20,最大迭代次数为100,粒子群算法参数为c1=c2=2,wmin=0.2,wmax=0.9;鲸鱼优化算法参数为a1从2线性减小到0,a2为从-1线性减小到-2,r1,r2∈[0,1]的随机数;狼群优化算法参数为a从2线性减小到0,r1,r2∈[0,1]的随机数;麻雀搜索算法参数为发现者占种群的20%,安全阈值为0.8,初始警戒者数量占种群的10%~20%。
4.1.1 单峰测试结果
(1)寻优精度分析:由表4可知,对于F1~F4测试函数,只有EMSSA都找到了测试函数最优解,而WOA、GWO、ISSA三种算法均未能找到函数的最优解,SSA仅在F1和F3找到了最优解,CSSA在F1、F3、F4找到了最优解,比较测试结果的平均值可知,EMSSA比其他5种对比算法要低几十个数量级,说明EMSSA算法的寻优精度最高。对于F5测试函数来说,6种算法均未找到函数的最优值,EMSSA相较于其他算法寻优精度提升不大,但EMSSA的最优值和平均值依然最小,其寻优精度最高。

表4 单峰测试函数结果Table 4 Results of unimodal test functions
(2)稳定性分析:由表4可知,在测试函数F1和F4中EMSSA算法的标准差为0,说明其稳定性比其他五种算法都要好,且算法每次都能找到最优解。在F2和F3测试函数中,EMSSA的标准差也要比其他五种算法低几十个数量级,说明EMSSA的稳定性更强。而在F5测试函数中,EMSSA的稳定性相较于其他五种算法差别不大。
(3)收敛速度分析:由图8可知,在F1~F4测试函数中,EMSSA以绝对的优势快速找到最优值。在F5中,ISSA收敛速度最快,但由于算法过早收敛,导致其寻优精度不如EMSSA。

图8 单峰测试函数收敛曲线Fig.8 Convergence curve of unimodal test functions
4.1.2 多峰测试结果
由表5数据可知,对于F6和F8测试函数,SSA、CSSA、ISSA、EMSSA算法都可以找到最优解,且平均值和标准差都为0,表明4种算法寻优精度和稳定性相同,但由图9(a)、图9(c)可知,在收敛速度上,EMSSA明显快于其他几种算法。对于F7和F9测试函数六种算法均未找到最优解,其中F7函数中EMSSA算法稳定性最好,在寻优精度上相较于ISSA提升不大,但收敛速度最快,在F9函数中,EMSSA算法相较于SSA、CSSA、ISSA在稳定性和收敛速度优势不大,在寻优精度略有提升。

表5 多峰测试函数结果Table 5 Results of multimodal test functions

图9 多峰测试函数收敛曲线Fig.9 Convergence curve of multimodal test functions
4.1.3 固定维数测试结果
由表6可知,对于F10测试函数,6种算法中除了GWO和ISSA都可以找到接近最优解,由平均值可知EMSSA算法的寻优精度最高,标准差中ISSA最小,算法最稳定,但其寻优精度较差,剩下的5种算法稳定性相近,综合来看,EMSSA在算法的寻优精度和稳定性最好。对于F11测试函数,六种算法均可找到接近最优解,从平均值来看SSA、CSSA、ISSA、EMSSA 4种算法寻优精度相近且优于WOA、GWO,从标准差来看,六种算法稳定性相差不大,从图10(b)可知,在收敛速度上EMSSA由于获得了较好的初始值,其收敛速度最快。综上,在固定维数测试函数中,EMSSA在算法的寻优精度和收敛速度有明显的提升。

表6 固定维数测试函数结果Table 6 Results of fixed-dimension test functions
为了进一步验证增强型改进麻雀搜索算法的性能,对EMSSA和其他五种算法进行Wilcoxon秩和检验,选取在5%的显著性水平下进行判断,当p<5%,则认为两种对比算法差异较大,当p≥5%时,则认为两种算法之间无显著性差异。将EMSSA同WOA、GWO、SSA、CSSA、ISSA分别独立运行30次进行秩和检验,其结果如表7所示。
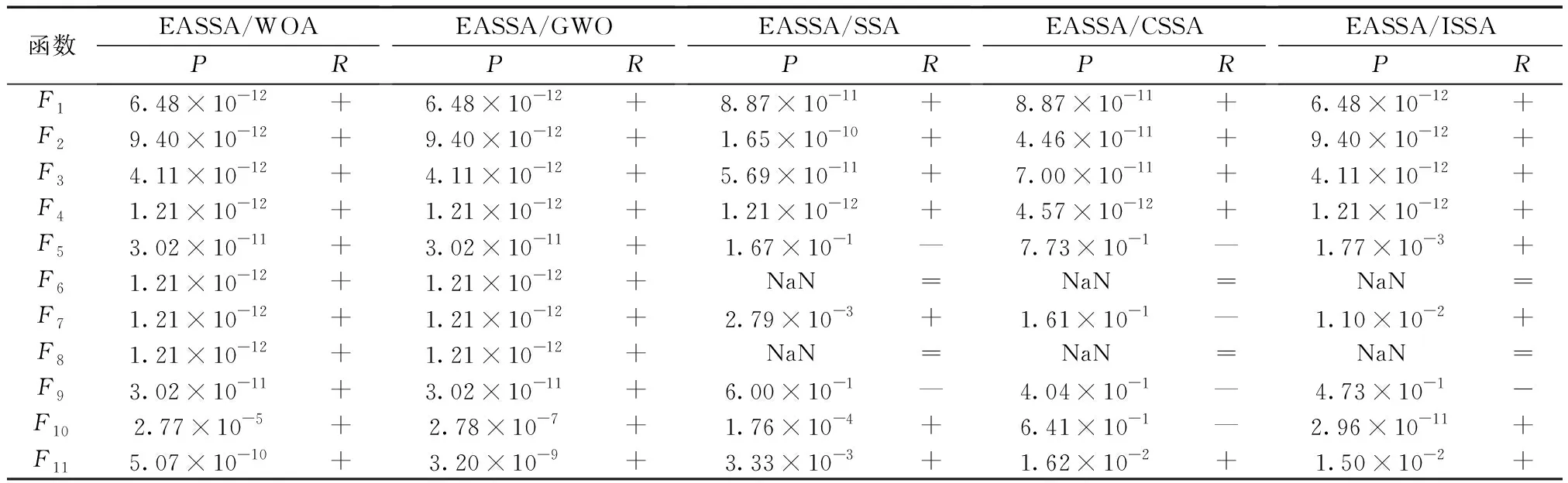
表7 Wilcoxon秩和检验结果Table 7 Wilcoxon rank sum test results
由表7可知,大部分P都小于5%,表明EMSSA相比于其他五种算法其结果是显著的。而在F6和F8相较于SSA、CSSA、ISSA无法进行显著性判断,这是由于在这两组测试函数中,SSA、CSSA、ISSA、EMSSA四种算法寻优精度相同。
4.2 航迹规划仿真实验分析
本文建立的无人机航迹规划模型为一个150 km×100 km×3 km的空间,其中规划的起点空间坐标为(10,90,1.1),终点坐标为(130,10,1.4),雷达威胁坐标为(30,60),威胁半径为8 km;防空导弹威胁坐标为(60,50)、(130,40),威胁半径为6 km;大气威胁坐标为(100,30),威胁半径为5 km。此外σ=104,权重为w1=0.5,w2=0.3,w3=0.2,飞行最大转角φ=60°,种群数量为30,最大迭代次数为300,警戒者数量初始值占种群10%~20%,安全阈值为0.8,发现者占种群比例为20%,并选取SSA和ISSA作为对比算法。
由图11可知,SSA、ISSA、EMSSA都成功进行了航迹规划,但在飞行航迹长度、飞行高度和路径平滑度有所差异。

图10 固定维数测试函数收敛曲线Fig.10 Convergence curve of fixed-dimension test functions
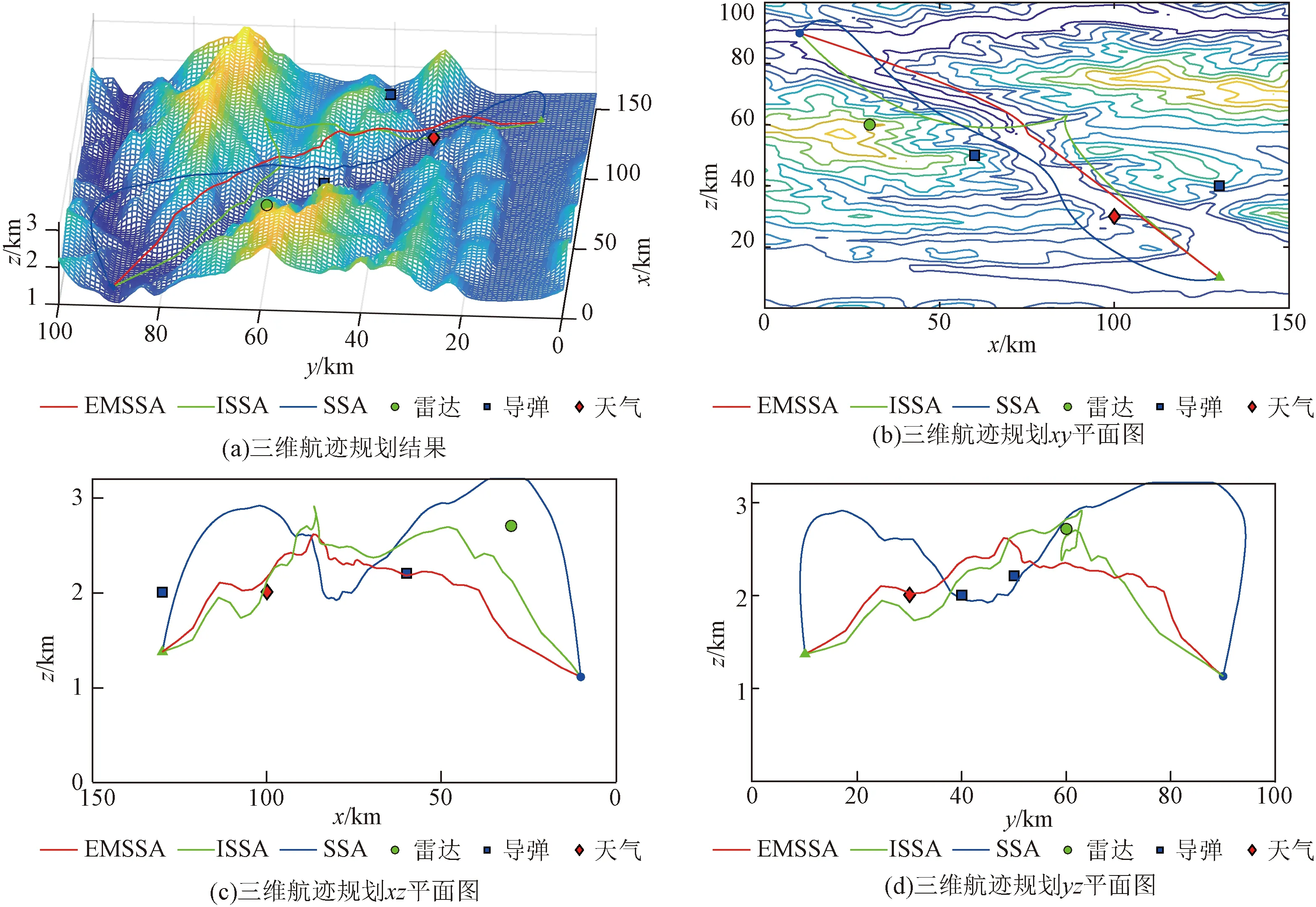
图11 无人机三维航迹规划Fig.11 UAV 3D track planning
其中SSA算法规划出的航迹长度最长、飞行高度最高,高度变化不平稳,增加了被地面雷达探测到的风险;ISSA规划的航迹转弯次数较多,在实际飞行过程中,对无人机本身性能要求很高;而EMSSA算法规划出的航迹在长度和飞行高度及转弯角度都要优于其他两种算法。
算法收敛曲线如图12所示,由于EMSSA采用了Logistic-tent混沌序列初始化种群,算法从一开始就获得了较好的初始值,使得算法收敛速度较快,在20次左右算法收敛到最优值,而ISSA算法在45次左右收敛到最优值,SSA算法由于未获得较好的初始值导致算法的寻优精度最差。

图12 算法收敛曲线对比图Fig.12 Comparison diagram of algorithm convergence curve
为避免智能算法随机性带来的影响,本文对3种算法分别运行20次,取其平均值,标准差和最优值进行对比,由图13可知,EMSSA算法相较于ISSA算法航迹规划寻优精度提升了4.11%,相较于SSA算法提升了9.51%,且EMSSA算法稳定性最好。

图13 评价指标对比Fig.13 Comparison of evaluation indicators
5 结论
针对无人机在三维空间中的航迹规划问题,利用增强型改进麻雀搜索算法进行规划,并以无人机航迹规划长度、飞行高度、飞行转角三个指标设计了代价函数。为了使无人机的飞行轨迹更加平滑,采用B样条曲线对初始航迹进行平滑处理。在增强型改进麻雀搜索算法中利用Logistic-tent混沌序列对麻雀搜索算法进行初始化,增强种群初始位置的随机性,扩大算法搜索范围;在发现者-警戒者位置更新过程中引入动态自适应调整策略,加快算法的收敛速度,提高全局搜索能力;利用高斯-柯西变异产生新的麻雀个体并更新位置,解决算法陷入局部最优问题。选取11个测试函数和五种对比算法进行测试,测试结果表明,本文提出的增强型改进麻雀搜索算法在性能上有明显的提升,并在三维空间中成功规划出一条无碰撞的最优飞行路径。本文建立的航迹规划模型只是针对地面静态障碍物,并未考虑动态障碍物,下一步,可结合无人机编队控制进行多机航迹规划算法的研究。
