智能网联全息路口应用探索
2022-12-17蔡刚强吴冬升邝文华
[蔡刚强 吴冬升 邝文华]
1 前言
中国互联网协会发布的《中国互联网发展报告(2021)》提到,在车联网领域,2020 年智能网联汽车的销量超过了303 万辆,同比增长了107%[1]。“聪明的车”与“智慧的路”作为国家战略方向齐头并进,智能网联路侧智能成为新基建行业热点,全国启动了近百个智能网联示范区建设。为避免重复建设实现资源最大化应用,住房和城乡建设部、工业和信息化部联合发布《开展智慧城市基础设施与智能网联汽车协同发展》通知,智慧城市与智能网联“双智”协同发展将成为主流。
交通路口作为城市道路最典型和最复杂的交通环境,做好路口安全及效率管理一直是相关部门核心关注点,也是智能网联业务的主要价值点。本文将从智能网联全息路口角度出发,分析全息路口与智慧城市及智能网联的关系,并给出智能网联全息路口解决方案,和智能网联全息路口典型应用。
2 全息路口发展情况
2.1 全息路口的发展背景
据公安部统计,2021年全国机动车保有量达3.95亿辆,其中汽车3.02 亿辆,机动车驾驶人达4.81 亿人,其中汽车驾驶人4.44 亿人,已经是名副其实的汽车大国。但根据世界银行发布的全球20 个主要国家千人汽车拥有量数据来看,中国每千人拥车量仅为173 辆,与西方发达国家千人拥车量普遍大于500 辆相比,仍有巨大的提升空间。根据高德地图的2020 年度中国主要城市交通分析报告显示,全国361 个城市中,有2.49%的城市通勤高峰处于拥堵状态,有37.67%的城市通勤高峰处于缓行[2]。不断增长的汽车保有量将进一步加剧城市交通压力,智慧城市的智慧交通需求日益突出。
交通路口是城市道路中环境最复杂、参与者最多、问题状况最频繁的交通场景。优化交通路口是缓解交通拥堵,提升道路通行能力,降低交通事故发生率最有效的手段之一。全国各地智慧城市建设当中,智慧交通均是核心建设内容之一。智慧交通建设通过建设各类感知系统采集原始数据,并通过大数据融合分析指导交通路口红绿灯策略优化、配时优化,完成交通非现场执法等各类操作。
另外,自动驾驶行业进入发展的快车道。自动驾驶技术发展过程中,无穷无尽的道路场景是自动驾驶的核心难题。要解决自动驾驶的问题,首先需要提高自动驾驶车辆的感知能力,但单车智能感知能力、感知范围一直是困扰行业的难题。感知能力不足会导致自动驾驶汽车存在安全风险、乘坐体验不友善及效率低下等问题。通过车路协同技术,能有效提升自动驾驶安全冗余,改善自动驾驶车辆乘坐体验,增强民众对自动驾驶信任度。
2020 年2 月,中央11 部门联合发布《智能汽车创新发展战略》,明确提出要构建先进完备的智能汽车基础设施体系,推动道路基础设施、智能汽车、运营服务、交通安全管理系统、交通管理指挥系统等信息互联互通。
智能网联汽车产业中“聪明的车”和“智慧的路”同步发展战略已然明确。2021 年4 月,住房和城乡建设部、工业和信息化部确定北京、上海、广州、武汉、长沙、无锡等6 个城市为智慧城市基础设施与智能网联汽车协同发展第一批试点城市。2021 年12 月,两部委确定重庆、深圳、厦门、南京、济南、成都、合肥、沧州、芜湖、淄博等10 个城市为智慧城市基础设施与智能网联汽车协同发展第二批试点城市。
2.2 全息路口的发展进程
“智慧的路”建设过程中,需要掌握道路各时段实时数据,路侧数据精准感知是各类业务开展的核心基础,目前市面上主流感知技术及其感知能力如表1 所示。
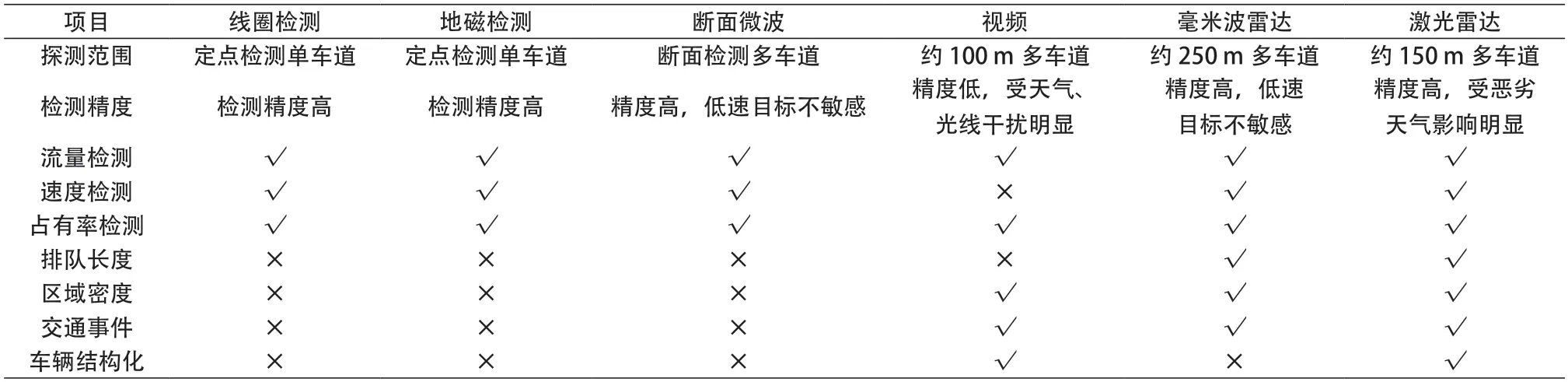
表1 交通路口主流数据采集方式感知能力对比图
当前路侧感知系统主要服务于交通管理业务,路侧智能感知系统普遍以线圈检测、地磁检测、断面微波检测、视频检测、人员驻点观察为主。实际应用当中,许多数据无法采集或精度不够而无法作为交通优化和交通治理的依据。
面对新增的智能网联车路协同业务,当前感知手段在定位、航向角、交通参与者尺寸等核心参数上均无法满足智能网联车路协同的需求。表1 中可以发现,视频检测加雷达检测可覆盖之前线圈检测、地磁检测、断面微波检测的检测能力,同时提供更全面的元数据采集能力,可满足智能网联车路协同业务感知能力需求,视频+雷达自然成为全息路口检测的优选方案。
2.3 全息路口发展趋势
现有交通路口感知系统建设过程中,未充分考虑智能网联应用需求。另外,因建设时间不同,建设需求不同,路口感知系统普遍存在各类数据相互独立,数据价值仅限对应业务系统,难以满足管理部门和最终用户的实际需求。所以,全息路口建设应在智慧交通需求的基础之上,充分考虑智能网联业务需求,通过多元感知融合,建设全息路口数字底座。
前文经过对各类感知设备能力进行分析,已知视频、激光雷达、毫米波雷达作为全息路口建设的优选感知设备,当前全息路口解决方案技术路线主要分三类,第一类为视频+毫米波雷达;第二类为视频+激光雷达;第三类为视频+毫米波雷达+加激光雷达,三种方案对比如表2 所示。
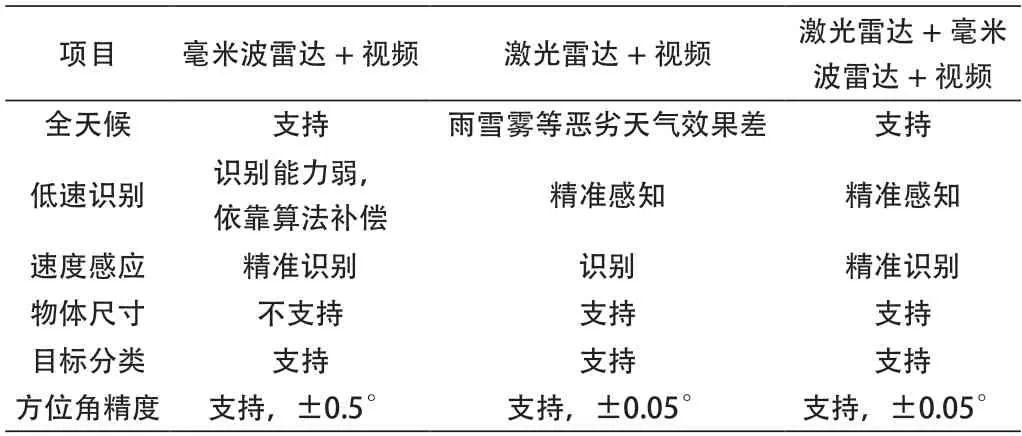
表2 全息路口感知方案对比表
由表2 可知,毫米波雷达+视频方案存在低速移动物体识别能力较弱,需要依靠算法补偿,不支持识别交通参与者尺寸等问题。激光雷达+视频方案则受雨、雪、雾等天气明显,无法满足全天候要求。视频+激光雷达+毫米波雷达三者融合方案,相互取长补短,可实现全时、全域、全量、精准的全息数据感知。
综合来看,全息路口发展趋势在技术层面,将以视频+激光雷达+毫米波雷达为主的多元感知融合为主要发展方向。在业务层面,基于多元感知融合建设全息路口数据底座,统一数据采集、数据分析、数据应用,提供更全面和更精准的交通路口实时数据,为智能网联车路协同、交通违法处罚、交通管理指挥等业务系统赋能,最终实现智慧交通和智能网联的“双智”融合。
3 智能网联全息路口的解决方案
3.1 智能网联全息路口建设需求
全息路口建设主要负责采集路口交通参与者的位置、速度、尺寸、属性、车牌等信息,基于元数据融合计算,得出流量密度、排队长度、加速度、航向角等各类业务数据指标,为赋能自动驾驶、交通指挥调度、交通执法等各类应用提供充分全面的数据。
针对智能网联车路协同业务需求,T/CSAE 53-2020合作式智能运输系统车用通信系统应用层及应用数据交互标准(第一阶段)及T/CSAE 157-2020 合作式智能运输系统车用通信系统应用层及应用数据交互标准(第二阶段)共定义了近30 种车路协同应用场景,全息路口应能满足其中规定的车路协同各场景的应用定义、预期效果、通信方式、数据交互标准等要求。
根据智能网联车路协同业务场景,对全息路口感知能力技术性能亦有严格要求,基于技术实现性高、易落地、可规模化部署原则,目前智能网联全息路口技术能力要求如表3 所示[3,4]。
3.2 智能网联全息路口建设内容
在智慧城市与智能网联“双智”协同发展的大前提下,全息路口的建设既要满足传统智慧交通需求,又要满足智能网联需求。本文提出全新的智能网联全息路口“N+1+2+3”系统架构,如图1 所示。
“N”指的是全息路口部署的各种信息化设备。例如在交通路口,通过建设激光雷达、毫米波雷达、AI 摄像机、边缘计算单元、信号控制机、RSU 通信设备实现路口基础信息采集、数据融合计算及道路信息发布。通过非机动车识别一体机等设备实现非机动车信息采集。通过AR 全景云眼,实现实景地图信息采集。
“1”指的是大数据平台,包括计算、存储和网络资源,以及服务中台、数据中台和AI 中台、算法仓库等。
“2”指的是三维数字孪生世界和AR 增强现实世界。一方面结合数字孪生技术,构建三维数字孪生世界,实现真实世界的数字化;另一方面通过与AR 技术结合,构建AR 增强现实世界;最终,实景和孪生融合,实现真实世界数字化,虚拟世界可视化,构建全息路口数据底座。
三维数字孪生世界是基于激光雷达、毫米波雷达、AI摄像机等路侧感知设备,实现对道路信息、基础设施、交通参与者、交通流、排队长度、区域密度、交通事件等信息的精准感知,对交通要素实时位置、方位、经纬度、速度、加速度、尺寸等信息全面感知。激光雷达、毫米波雷达、AI 摄像机感知数据三者融合,通过三维建模,提供最全面、最准确的交通路口信息,实现交通路口全息感知数字孪生应用。
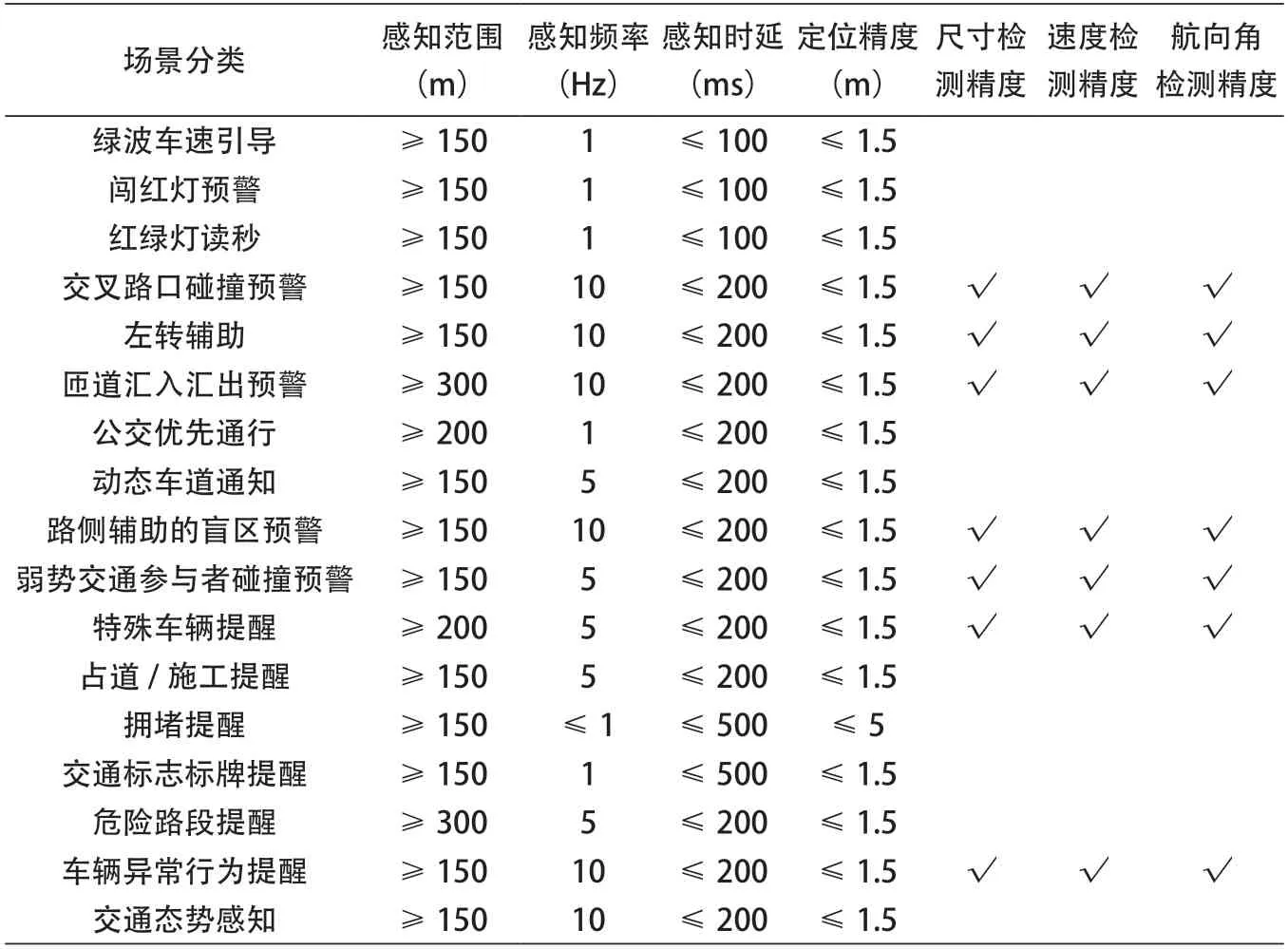
表3 车路协同路侧感知系统技术

图1 智能网联全息路口系统架构
AR 增强现实世界是基于数字孪生世界及AR 增强现实技术,通过AR 全景云眼融合地面视频资源、地图资源,快速构建数字孪生世界与AR 增强现实世界的融合,实现虚拟数据及现实数据融合,为城市大数据、智慧城市建设提供实时、完整、全面、准确的交通路口信息。
“3”指的是V2X 云控平台、实景指挥调度平台、非机动车管理平台这三个业务应用系统。通过打造全息路口数据底座,完成智慧城市和智能网联所需数据采集,提供统一的、标准的、精确的业务数据,实现一套系统、一套数据、一套标准,多重使用。
赋能智能网联V2X 云控平台和智能网联车路协同业务。通过精准采集路口全量数据,推动“车-车/车-路/车-人”通信的交通流预测预警、交通事件预测预警、事故自动报警、行驶策略指引、交通管控信息的交互与协同控制,实现智能网联道路交通全要素管控,有效减少交通事故、提高道路及车辆利用率等。
赋能智慧交通指挥调度、智慧城市治理等业务。通过精准扫描路口全量数据,实现40+种路口级交通参数输出。基于全息路口数据,可以支持各种解决方案优化,比如路口交通事件检测、路口优化、信号配时调整等。当数据积累到一定时间后,还可以进行交通隐患、交通黑点的识别,交通热力图刻画,提供黑点优化方案,交通组织优化方案。通过赋能智慧交通指挥调度系统,解决全息路口只能看,但是不能帮助交警解决实际工作的尴尬局面;为全息路口交警业务提供业务抓手,形成业务闭环。
赋能非机动车管理业务。基于全息感知数据底座,感知非机动车在交通路口数据,建设RFID 射频技术的新型电子警察监控系统,发挥射频视频双基结合优势,利用射频数据对视频数据进行补充和校正,系统自动识别、抓拍电动自行车超载、闯红灯、逆行、占用机动车道及不佩戴头盔等违法行为,对电动自行车进行24 小时全天候的非现场违法查处,提升违法行为精准查缉效率。
4 智能网联全息路口的典型应用
全息路口在智能网联中的应用,主要分为感知、通信、计算及决策环节,如图2 所示,为智能网联车辆提供完整、精确、实时的道路信息,以及提供安全类预警服务、效率类服务,信息通知类服务,典型应用如下。
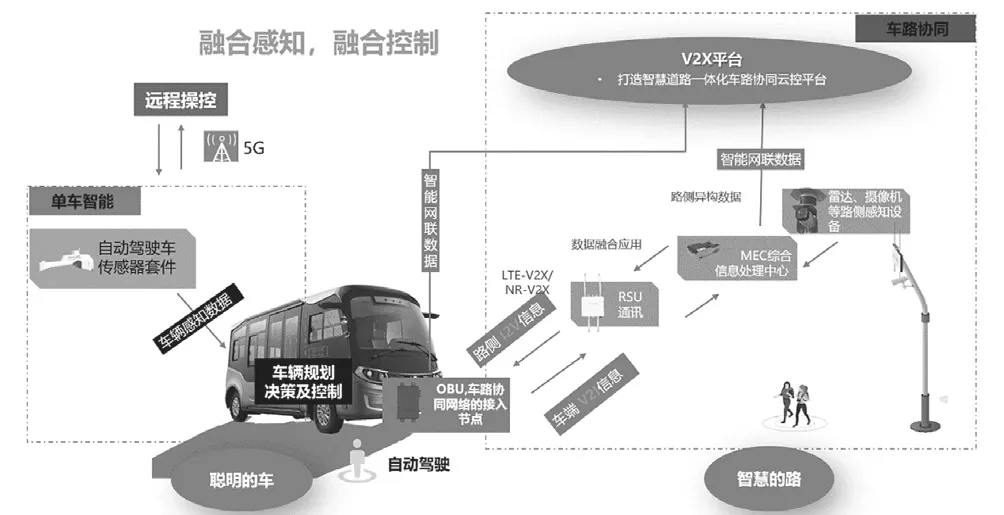
图2 全息路口车路协同业务逻辑图
4.1 智能网联全息路口赋能自动驾驶
智能网联全息路口可以从多方面赋能自动驾驶。
(1)红绿灯信息推送
单车智能依靠摄像头识别红绿灯信息,存在前方大车遮挡看不到红绿灯,或者树木遮挡红绿灯,以及在恶劣天气条件下,比如雨雾天气、强光照射,识别错误的情况。而依靠智能网联全息路口,直接读取红绿灯信号机信息,给到RSU,通过RSU 广播到自动驾驶车辆。可以让自动驾驶车辆精准读取到红绿灯信息,并且可以完全实现和信号机红绿灯倒计时秒数的同步。
(2)超视距信息获取
单车智能安装的各类传感器都有自己的覆盖范围,和人眼视距类似,例如超声波雷达探测距离5 米,摄像头100 米,激光雷达150 米,毫米波雷达250 米的融合感知组合。超出这个距离,依靠单车智能就无法再识别和获取信息。
依靠智能网联全息路口,可以通过安装在全息路口的传感器检测出交通路口出现的交通事故,再将相关信息传递给路侧边缘计算设备,进而通过区域边缘计算设备或者中心云平台,传递给几公里外的RSU 设备,并通过RSU设备广播给自动驾驶车辆,实现超视距交通状态感知。
(3)鬼探头等典型场景应对
鬼探头通俗来讲,就是在前方有车辆或障碍物阻挡住司机视线,也就是存在视野盲区,从路边突然蹿出一辆非机动车或行人,导致司机避让不及时。因为事发突然,彼此都没有反应与躲避的时间与空间,令人猝不及防,因此被称为鬼探头。
单车智能目前无法有效规避鬼探头风险。只有在交通路口进行智能网联路侧基础设施部署,通过路侧智能设施识别出非机动车或行人的行为,通过路侧边缘计算设备进行计算分析,预判出潜在碰撞风险,及时推送给自动驾驶车辆。
除了鬼探头这样的场景外,还有一些单车智能难以识别的场景,比如路边车辆停在交通路口右转机动车道上,挡住自动驾驶车辆正常行驶线路,自动驾驶车辆难以判断该车辆是在等待右转灯继续行驶,还是非法停车状态。而通过智能网联路侧基础设施,可以进行识别和判断该车辆停留时间,给自动驾驶车辆提供决策依据。
(4)安全冗余
自动驾驶产业发展,最需要的就是安全。一旦出现交通事故,尤其是造成人员伤亡和财产损失,对自动驾驶产业发展将造成致命打击。因此,单车智能的主流做法是采用多重冗余的多传感器融合感知+高精地图+高精定位。
而智能网联全息路口可以让道路具备对交通参与者行为的分析预测能力、对交通环境和道路设施状态的判断能力、对交通事件的感知能力,这些结果通过智能网联系统,给到自动驾驶车辆,作为自动驾驶车辆决策的输入源之一,和单车智能输入源进行融合判断,可以有效提升自动驾驶车辆的安全性,从而让自动驾驶车辆多一层安全冗余。
4.2 智能网联全息路口赋能非机动车管理
目前,以电动自行车为主要群体的非机动车,凭借其灵活轻便、价格适中的特点,成为快递、外卖、民工等群体的主要出行工具。由于驾驶者大多数为快递外卖小哥或者赶时间的上班人群,通常时间紧急,加之驾驶者安全行车、文明交通意识淡薄,故频繁接打电话、低头查看手机,为抢时间闯红灯、逆行、不按车道行驶等行为屡屡发生,不仅扰乱城市交通秩序,也给其自身安全带来了严重隐患。
在智能网联全息路口,通过射频视频一体机准确识别车辆身份并取证违法过程。射频视频一体机主要功能包括:支持射频800/900 MHz 空中接口协议;可兼容机动车及非机动车电子标识;采用900 万像素CMOS,最大分辨率可达4K;支持非机动车违法行为识别和抓拍;支持机动车及非机动车电子标识国家标准。
智能网联全息路口通过部署射频视频一体机系统,自动识别、抓拍电动自行车各种违规行为,精准采集违规车辆的“车牌号码、违规时间、违规地点、违规类型”等数据,辅以违规过程的录像,实现对电动自行车进行24 小时全天候的非现场违规监控及有效管理。
5 结语
智慧城市和智能网联是城市新基建的核心内容,交通路口是当前城市智慧交通的主要瓶颈,是智慧城市建设需要攻克的核心问题之一。智能网联全息路口建设可为“双智”工作筑实数据基础,提供全天候、全要素、全场景、最全面、最准确的交通路口信息,是提升城市交通安全、交通效率,实现智能交通的重要手段。通过建设智能网联全息路口,可为多类业务系统赋能,统一建设标准,降低重复建设成本,是未来城市建设的重点方向,对智慧城市及智能网联产业均具有积极意义。
