X光安检图像低对比度区域目标的分割与增强算法*
2022-12-16季俊鹏郑俊褒
季俊鹏,郑俊褒
(浙江理工大学信息学院,浙江 杭州 310018)
0 引言
随着X 射线透视技术的发展,X 光成像技术在安检中得到了较为广泛的应用。而X 光安检图像中,常存在一些如动植物等处于低对比度区域的目标。低对比度区域具有灰度变化不明显的特点,使得图像中的目标、背景等信息都包含在一个较窄的灰度范围内而难以区分[1],从而给这类目标的检测和识别带来困难。
改善图像质量的方法有很多,如直方图均衡、同态滤波、Retinex等[2-4]。但这些方法直接对全局增强,可能改变图像中的其他区域。若能先将目标区域分割出来,则可实现针对该区域的局部增强。常用的分割方法有阈值法、区域生长法和聚类法等[5,6]。单一某种分割方法具有较好的泛用性,但对特定复杂图像欠缺针对性,如阈值法在图像比较复杂或图像目标和背景灰度比较接近时,分割效果并不理想。区域生长法在灰度不均时可能导致空洞和过度分割。因此对于特定图像,使用多种分割方法结合的方式更为适合。安检图像中无论是对整张图片还是在低对比度区域中,都很难找到合适的分割阈值。对于同一目标对象,其像素具有灰度相似性,以及区域连通性。而区域生长方法适合将具有相似性的相邻像素进行聚合。
综合以上分析,本文提出了先粗分割,后细搜索的模糊增强算法。该算法先在粗分割阶段使用OTSU方法提取出低对比度区域。然后在细搜索阶段使用区域生长方法在低对比度区域中提取出目标对象。最后在HSV 空间中根据模糊隶属度值对像素饱和度分量进行调整。
1 基于区域生长的图像分割方法
区域生长法就是依据事先拟定的准则,从一个像素点或者一小块领域不断聚集像素的过程。基本的算法思想就是从种子点或小区域开始,根据生长准则合并相邻像素或其他具有相同属性的区域到当前区域,直到没有合适的点或区域为止。区域生长的一般步骤如下。
⑴ 在图像中,选择合适的种子点,用来初始化集合A。
⑵判断集合A的领域像素是否符合生长准则,符合则合并。
⑶重复步骤⑵,直到没有符和生长准则的领域像素,结束合并。最终,集合A即为区域生长的分割结果。
区域生长法算法的效果好坏,取决于种子点的选取和生长准则是否合适,其规则多根据图像特点来进行设置。种子点的选取根据人机交互的不同形式,分为半自动分割法和自动分割法两种。半自动分割方法在种子点选取过程中需要人工介入。但这并不能带来更好的效果,且会导致每次的分割结果不同。因此,目前更多使用自动分割方法。如文献[7]中,对于自然图像,认为若直方图有多个峰值,每个峰值对应一个区域,则可以将每个直方图的峰值位置作为区域的种子点;文献[8]对于脑部磁共振图像,先使用k-means进行聚类划分,再将聚类中心作为种子点;文献[9]对于乳腺X 光图,通过查找有关乳腺X 光图像方向的信息,自动计算种子点。生长准则的制定可以是一个阈值,也可以是一个算法。文献[10]对于遥感图片中的河流分割,其将候选点与种子点差的绝对值作为生长准则,阈值使用最大和最小值的均值来初始化,然后根据后续分割出的前景与背景的均值对阈值进行迭代;文献[11]使用经脉生长趋势作为区域生长算法的生长准则,通过对每个像素的八个方向进行路径算子运算,找到像素可能感兴趣的方向,并通过对感兴趣方向进行排序,得到像素的扩展方向。
综上所述,对于不同种类的图像,会采用不同方法用于种子点的选取和生长准则的制定。对于X光安检图像,低对比度区域目标对象在其邻域中灰度值较高。因此,可以通过寻找低对比度区域极大值点,来实现种子点的自动选取。目标区域内外像素具有不同的灰度,则可以使用像素点邻域灰度的乘积与阈值的比值作为生长准则。此外,为了应对不同图像中,目标区域对比度不同所带来的影响,本文制定了根据低对比度区域统计特性来确定阈值的方法。
2 低对比度区域目标分割增强算法
X 光安检图像中,低对比度区域与其他区域灰度相差较大,且低对比度区域中的目标灰度值较大。根据上述特点,本文提出了如图1所示的分割增强算法。
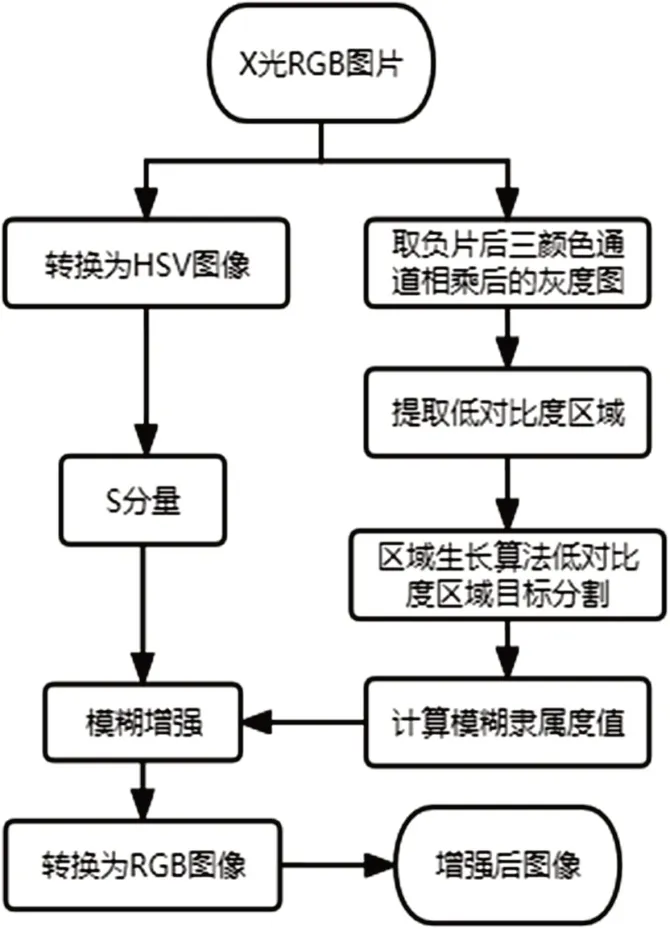
图1 算法流程
首先将伪彩色图像取负片后三通道相乘。然后使用OTSU 算法分割出低对比度区域。在低对比度区域中用均值偏移选取种子点后,再使用区域生长算法得到目标区域。最后在HSV 空间中根据隶属度值对饱和度进行调整。
2.1 粗分割
X 光安检图片中,三个颜色通道做相乘处理后一般存在较为明显的三段灰度层级,即背景区域,低对比度区域和其他区域。背景区域为空气部分,在负片中灰度极低,可直接排除。低对比度区域与其他区域灰度相差较大,可以使用OTSU 算法将低对比度区域与其他区域区分开来。
具体方法为先将背景区域排除,然后假设剩余的像素有L个灰度级[1,2,…,L],目标是找到一个阈值T,能够以差异最大化的方式将剩余像素分为低对比度区域和其他区域两个部分。设低对比度区域像素个数占图像整体比例为w0,平均灰度为u0;设其他区域像素个数占图像比例为w1,平均灰度为u0。根据上述条件可得:

最后使阈值T从1到L遍历完整个灰阶,取其中使类间方差最大的T作为分割阈值。
2.2 区域生长细搜索
⑴基于均值偏移种子点求取
如前所述,确定极大值点就能确定目标的大致区域。为此,本文使用如下形式的均值偏移方法来寻找低对比度区域的极大值点:

Mh(x)表示偏移均值。g(xi,x)用来表示样本点xi与中心点x灰度的差值,也就是说这里的均值偏移方向表示为灰度值增加的方向。根据式⑵我们可以得出中心点x的迭代公式:

式⑶表示第t+1次偏移的中心点由t次中心点加上偏移向量所得。其中a为偏移系数,用来控制中心点在偏移均值方向上移动的步长。根据式⑶可以通过逐步迭代的方式将x逼近图像中灰度极大值点。最终本文设计了如下的迭代步骤来求出极大值点。
步骤1前小结提取出的低对比度区域记为集合A。
步骤2在图像中随机初始化一百个中心点。
步骤3对于某一个中心点,将其半径h内的所有点记作集合Sh。
步骤4计算从中心点开始到集合Sh中每个元素xi的偏移向量,并根据式⑵计算中心点的偏移均值。
步骤5所有中心点沿着偏移均值方向移动,其移动的下一个位置由式⑶给出。
步骤6重复步骤3 到步骤5,直到所有偏移向量的模小于某个值,将最后这些中心点记为集合B。
通过前面六个步骤,就可以大致逼近灰度极大值点。将那些没有落在集合A内的点清除后,其结果为A∩B。对于A∩B中的极大值点,有的不落在目标区域内,需对这些点做进一步区分。由于目标区域灰度较高,因此可以使用OTSU 将该点集分成两部分,其中灰度较高的极值点为目标区域内的点。最终将目标区域内灰度最大的极值点作为种子点。
⑵区域生长准则
目标区域内灰度大于目标区域外,所以目标边缘像素点邻域灰度的乘积必然小于目标区域内非边缘像素领域灰度的乘积。对于像素点xi,可以用Vxi和阈值进行比较。Vxi表示为:

其中,Gi表示待加入点像素的邻域,xk为邻域Gi内的像素。将原灰度除以d,是为了使Vxi落在0 到1 附近。值d通过式⑸确定:

其中,max v和min v分别表示区域中的最大值和最小值,β为系数。
一般的阈值法直接使用与固定阈值比较来作为生长条件。但对于不同图像,目标区域对比度不同,简单的将所有图片的阈值设为同一值并不可取。为此,本文制定式⑹所示的阈值确定方法:

通过该方法可以根据低对比度区域本身的特点自适应的选取阈值。在生长过程中如果待加入点的值Vxi大于等于阈值thre,则加入,直到没有符合条件的点。最终生长出的区域为包含目标的感兴趣区域。
2.3 模糊增强
前面提取出的感兴趣区域中的点并不完全属于目标区域。已知目标区域的灰度值在低对比度区域较高,所以,感兴趣区域的像素点越接近极大值点,则属于目标区域的可能性就越大。因此,对于感兴趣区域内的点可以建立相应的模糊隶属度,然后根据像素隶属于目标的程度对像素进行调整。模糊隶属度由式⑺表示:

其中,value(xi)表示像素点xi的灰度值,max为感兴趣区域中的最大值,n为大于1的实数。
最后,为了在像素调整过程中不过多改变像素原本的颜色,本文将原图像转化到HSV 空间,根据隶属度值对饱和度分量S 进行调整,调整完后再将HSV 空间的图像转化回RGB空间。
3 实验结果分析
3.1 图像数据采集
⑴图像采集方法
本文使用铁片、树叶作为实验材料。其中叶片作为植物风险源,模拟可能处于低对比度区域的目标。实验过程中将铁片和叶片放入纸箱内,其摆放方式如图2 所示。实验中使用的X 光机为海康威视生产的NP-SC5030。
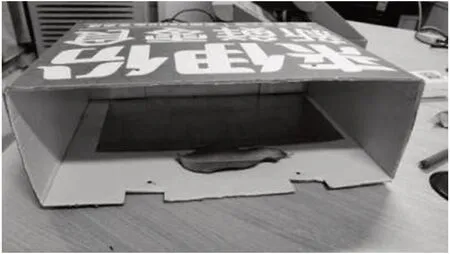
图2 采集材料摆放示意图
⑵采集结果
采集的图片如图3 所示。图片中子图a、b、c、d 分别是1张、3张、5张和7张叶片的结果。可以看到叶片区域与纸箱区域对比度较低,很难将两者区分开来。随着叶片数量的减少,其可见程度更低,也就是说,不同的叶片厚度,在图像中会有不同的对比度。
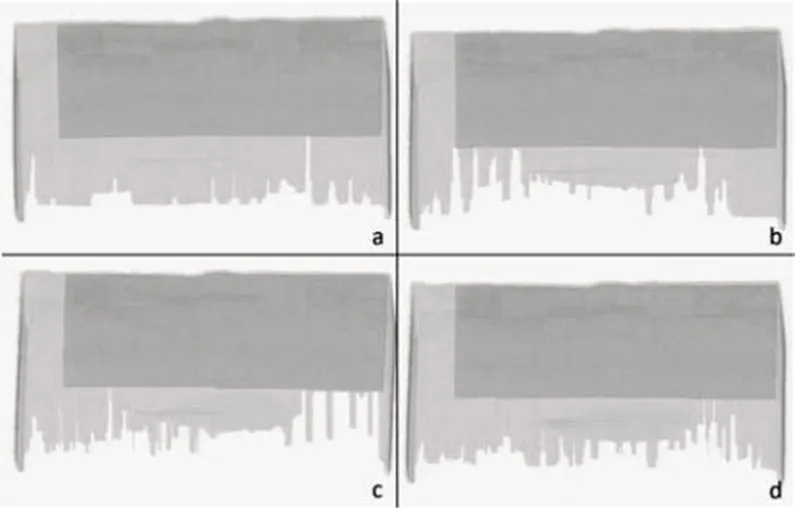
图3 采集结果
3.2 粗分割结果分析
图4 为使用OTSU 的粗分割结果,其中空气部分的低灰度区域与铁片部分的高灰度区域都被去除,实现了纸箱和叶片低对比度区域与其他区域的分离。

图4 OTSU分割结果
3.3 细搜索结果分析
如图5所示,子图a中的点表示使用均值偏移后纸箱和叶片区域的极值点,可以看到叶片区域的灰度要大于纸箱部分。经过滤后,其结果如子图b 所示。纸箱部分的极值点基本被滤除。对纸箱中剩下的孤立点,可根据极值点附近其他极值点的个数,滤除周围点数较少的极值点。

图5 极值点过滤结果
图6 从上到下展示了叶片数量为4~7 不同对比度下目标的分割结果。其中左边的图像为原图,右边的图像为分割结果。图6中的黑点为生长种子点。可以看到区域生长算法的种子点均在叶片内。从右边的分割结果上看,对于不同对比度的情况,本文算法能够实现对目标区域较为完整的分割,为后续的像素增强奠定了良好基础。
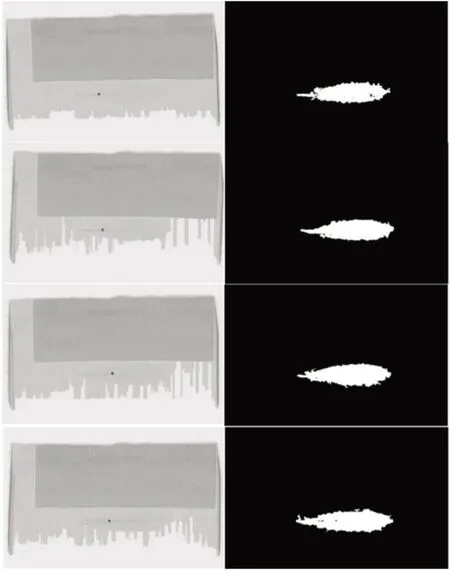
图6 分割结果
3.4 模糊增强增结果
图7 中子图a、b、c、d 分别为叶片张数为四张、五张、六张、七张的增强结果。可以看到叶片区域的成像被改善,同时对于图像的其余部分没有做出改变。虽然在子图a 中叶片区域较为零碎,但并不妨碍对叶片内容的识别。
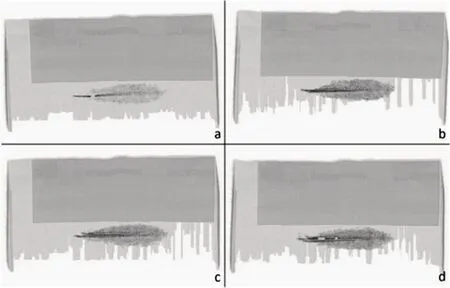
图7 不同叶片数的增强结果
3.5 与其他算法的比较
本文算法和CLAHE[12]、MSRCR[13]两种算法进行了比较。CLAHE 只能用在灰度图像上,为此将CLAHE作用于HSV 空间中的饱和度分量上。图8 以七张叶片为例,展示了使用三种算法的增强结果。
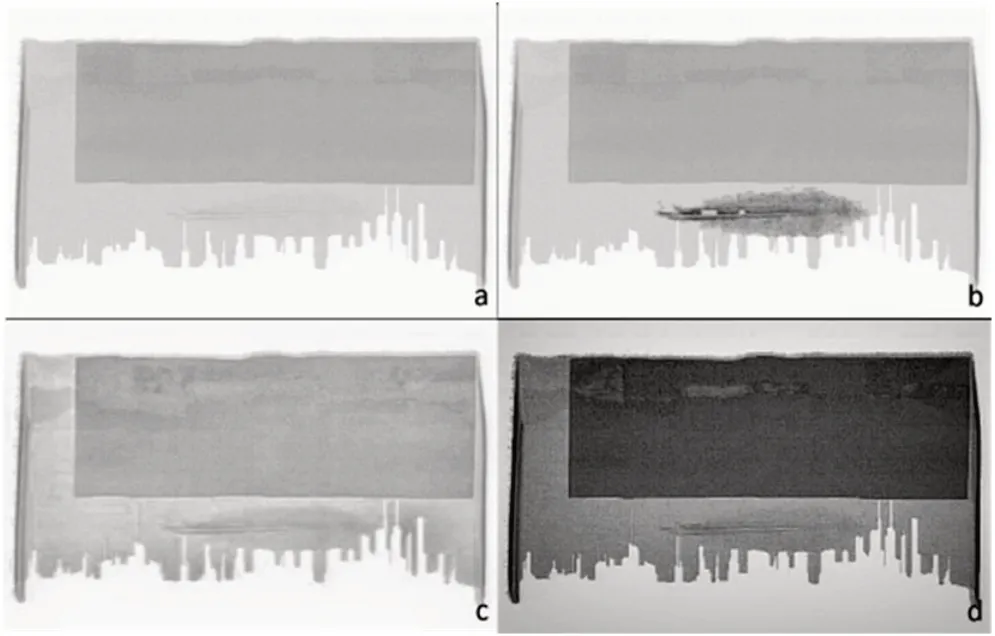
图8 不同算法的增强结果
图8 中,子图a、b、c、d 分别表示原图、本文算法、CLAHE 及MSRCR 的增强结果。可以看到三种算法对原图都有一定的增强效果。本文提出的算法和CLAHE 算法对原图的改变较小,MSRCR 对原图的改变较大。子图d 中表示空气的白色部分变为了蓝色,纸箱部分变为了红色,说明MSRCR 虽适用于自然图像,但并不适用于X 光图像。与CLAHE 相比,本文算法的增强结果在叶片的细节表现上要更清晰,且本文算法对图片其他区域不会造成影响。
4 结束语
本文提出了先分割后增强的低对比度区域目标的分割增强算法。即先使用OTSU 的粗分割算法和区域生长的细搜索方法提取出低对比度区域的目标,然后根据隶属度函数对目标区域进行模糊增强。实验中使用叶片图像对算法的分割增强效果进行了仿真验证。结果表明,该算法可以实现对不同叶片张数,即不同对比度下目标的分割与增强。与CLAHE、MSRCR 两种全局增强算法相比,本文算法在增强目标区域的同时,不会改变图像中的其他区域。然而对于如一张叶片等对比度过低,目标与背景区域的灰度值过于接近的情况,本文算法还不能对其进行完整分割增强,在后续的研究中需做进一步改进。