基于数据融合的电力线巡检无人机安全距离研究
2022-12-12王兆辉
王兆辉
(国网河北省电力有限公司,河北 石家庄 050000)
无人机在电力巡线过程中,可能遇到强电场设备击穿、风压扰动、机载遥感设备最小视野距离限制等安全距离限制。因为输电线路自身的电压场强在线路周边会产生强电场,导致无人机上的电势差可能击穿无人机电子设备,所以无人机应与线路保持一个最小安全距离[1]。因为无人机在遭遇突发风压、风速异常等大气对流问题时,会对其巡航线路造成影响,使无人机过度接近线路,以致发生碰撞或者被电场电势差击穿,所以也应考虑突发风压扰动产生的安全距离需求。机载遥感设备,包括倾斜摄影设备及激光点云设备等,均需要一个最小视野距离,同样对无人机安全距离提出了要求[2]。如果小于设备的安全距离,可能导致无人机设备的损坏[3]。
在常规安全距离相关数据的融合过程中,一般采用逻辑分析法进行数据分析[4]。但无人机的实际运行过程一般会面临更复杂的环境,此时应对无人机安全距离的数据融合模式进行更深入的分析[5]。因为复杂数据会产生混沌效应,此时构建逻辑分析模型或者模糊控制模型很难实现无人机的安全距离控制,所以应在智能电网人工智能系统支持下,对无人机进行基于动态机器学习的安全距离控制[6]。
1 无人机安全距离的数据来源
1.1 基于电场场强的无人机安全距离控制
输电线路因为电缆输电电压所产生的线路周围电场强度(下文称场强)可能产生较为显著的电势梯度,而无人机自身也存在一定的尺寸跨度,所以线路场强对无人机的影响并不显著,但其场强梯度对无人机的损害则较为致命。这是因为场强梯度在无人机两侧产生的电势差,可能会导致无人机产生强感应电流,使无人机设备被感应电流击穿[7]。
以±500 kV直流输电线路为例,其周边没有交变电场,但会产生有一定梯度的稳定电场,此电场会对无人机产生影响,带来击穿风险。Simulink仿真条件下,其场强分布规律见表1。
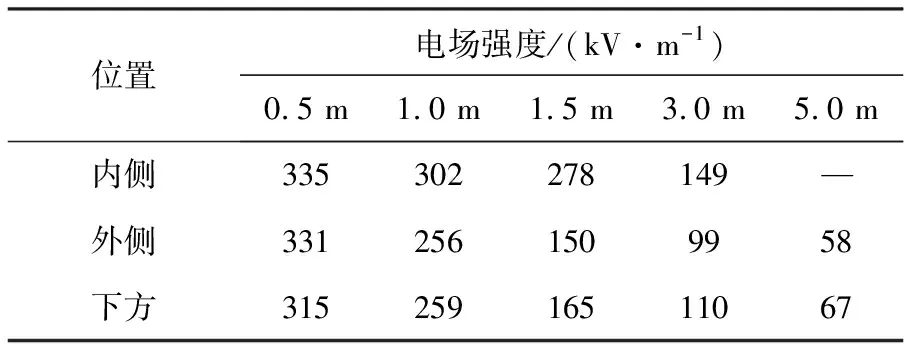
表1 ±500 kV输电线路直线塔空间电场分布情况表(I=3 kA)
表1中,因为线塔内侧不能提供5.0 m的空间条件,所以线路内侧无法仿真5.0 m的场强数据,但通过仿真数据可知,随着与线路之间的距离增大,场强显著降低,达到5.0 m时,场强已经下降到67 kV/m。
在此模式下对±500 kV直流线路的空间磁场强度进行基于Simulink的仿真,其磁场分布规律见表2。

表2 ±500 kV输电线路直线塔空间磁场分布情况表(I=3 kA)
表2中,±500 kV输电线路的磁场分布下降强度与表1中的电场强度类似,但下降幅度更大。表1中的电场强度数据级别的下降幅度为80.0%,而表2中的磁场强度的下降幅度为93.6%。
根据电磁场的比奥-沙伐定律,当导线内实时电流强度为I时,其回路周边磁感应强度B可以表达为:
(1)
式中:μ为空气介质的磁导率;x,y为被测量点即无人机出现位置距离导线的法向水平距离和垂直距离。
图1所示为无人机的电磁场击穿故障树,无人机的机械构建跨度、导线中的电流值、空气磁导率、无人机距离导线的距离,共同构成了无人机击穿的故障原因,故障条件叠加模式为逻辑“与”。
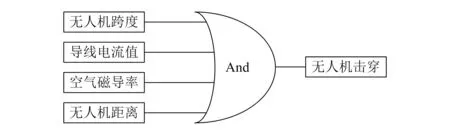
图1 无人机电磁场击穿故障树示意图
1.2 基于风压扰动的无人机安全距离控制
假定无人机巡航过程中,突发大气对流现象,产生的阵风风速为vf,那么无人机会在巡航方向上叠加一个速度分量vf,该分量会使无人机以一定速率向导线靠近。此时假定无人机的最大平飞速率为vmax且其最大加速度为amax,就可以得到一系列控制公式。
此时,无人机叠加后向导线靠近的巡航速度v′如式(2)所示:
v′=v0sinφ0+vfsinφf
(2)
式中:v0,vf分别为无人机当时的巡航速率和叠加风速;φ0,φf分别为无人机巡航速度矢量与导线法线的夹角和叠加风速矢量与导线法线的夹角。
此时,无人机利用最大加速度修正该速度时其自身移动的距离B为:
(3)
式中:amax为无人机最大加速度,此时无人机的避障策略为全部加速度施加在其与导线法向反向的矢量方向上。
由此可以基本断定,无人机的风压扰动产生安全事故的条件数据如图2所示。
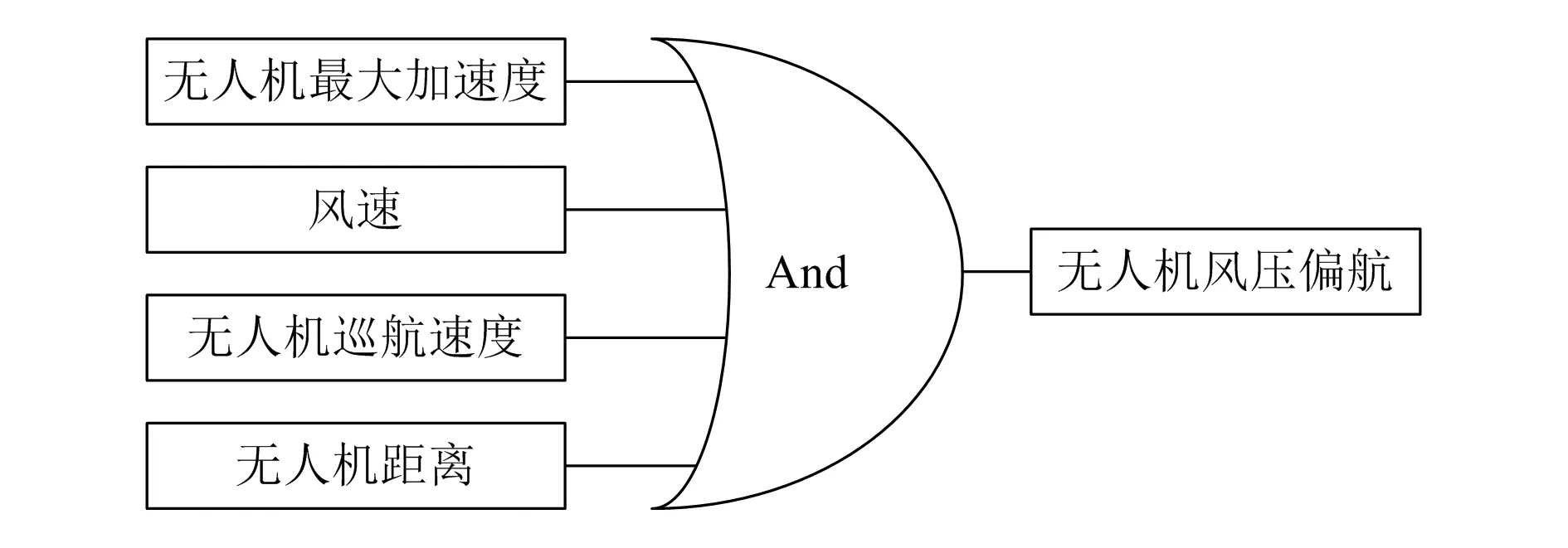
图2 无人机风压扰动偏航故障树示意图
图2中,对风速和无人机巡航速度可以使用矢量进行控制,也可以使用其对输电线路法线的速率值进行控制,图中4个条件的故障条件叠加模式为逻辑与。
1.3 遥感设备最小应用距离决定的安全距离
遥感设备最小应用距离的一般限制条件为被遥感设备的尺寸,即通过电力建设管理信息系统(BIM系统)查出铁塔等设备的高度、宽度等尺寸,从而获得被遥感设备的尺寸,再查表获取遥感设备的最小应用距离。如果无人机携带多个遥感设备,则应选择所有设备最小应用距离的最大值进行安全距离控制。
图3为遥感设备因最小距离失效故障树,遥感目标尺寸、设备最小应用距离、无人机巡航距离等数据共同形成了遥感设备失效故障,该3个条件的故障条件叠加模式为逻辑与。
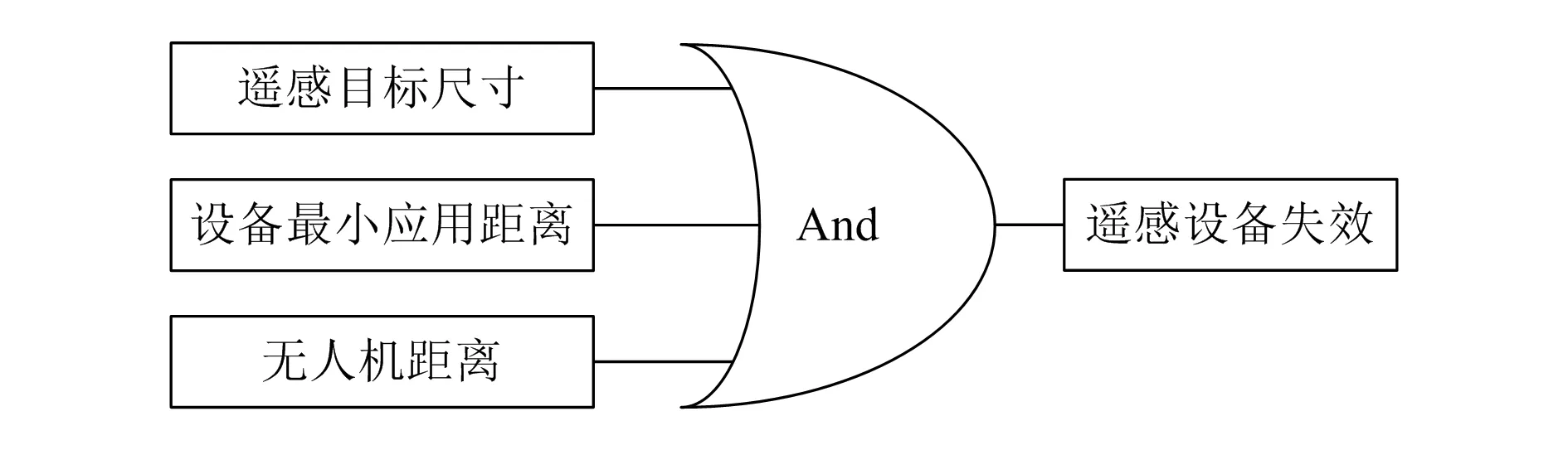
图3 遥感设备因最小距离失效故障树示意图
2 电力巡线无人机安全距离控制的数据融合算法
2.1 传统数据融合模式
传统模式下,通过上述3个故障树分别算得无人机安全距离,分别为LA,LB,LC,那么无人机的安全距离L为:
L=max(LA+LB,LC)
(4)
式中:LA,LB,LC分别为电磁场决定的安全距离、风压环境决定的安全距离、设备最小应用距离决定的安全距离。
其中LC为多个遥感设备最小应用距离的最大值,详见公式(5):
LC=max(L1,L2,…,Ln)
(5)
式中:L1~Ln分别为第1个~第n个遥感设备的最小应用距离。
2.2 基于机器学习的数据融合模式
基于机器学习的数据融合模式,是将图1、图2、图3中的3个故障树的所有11个条件数据进行融合,最终在基于神经网络的机器学习算法下,直接求得其安全距离L,如图4所示。
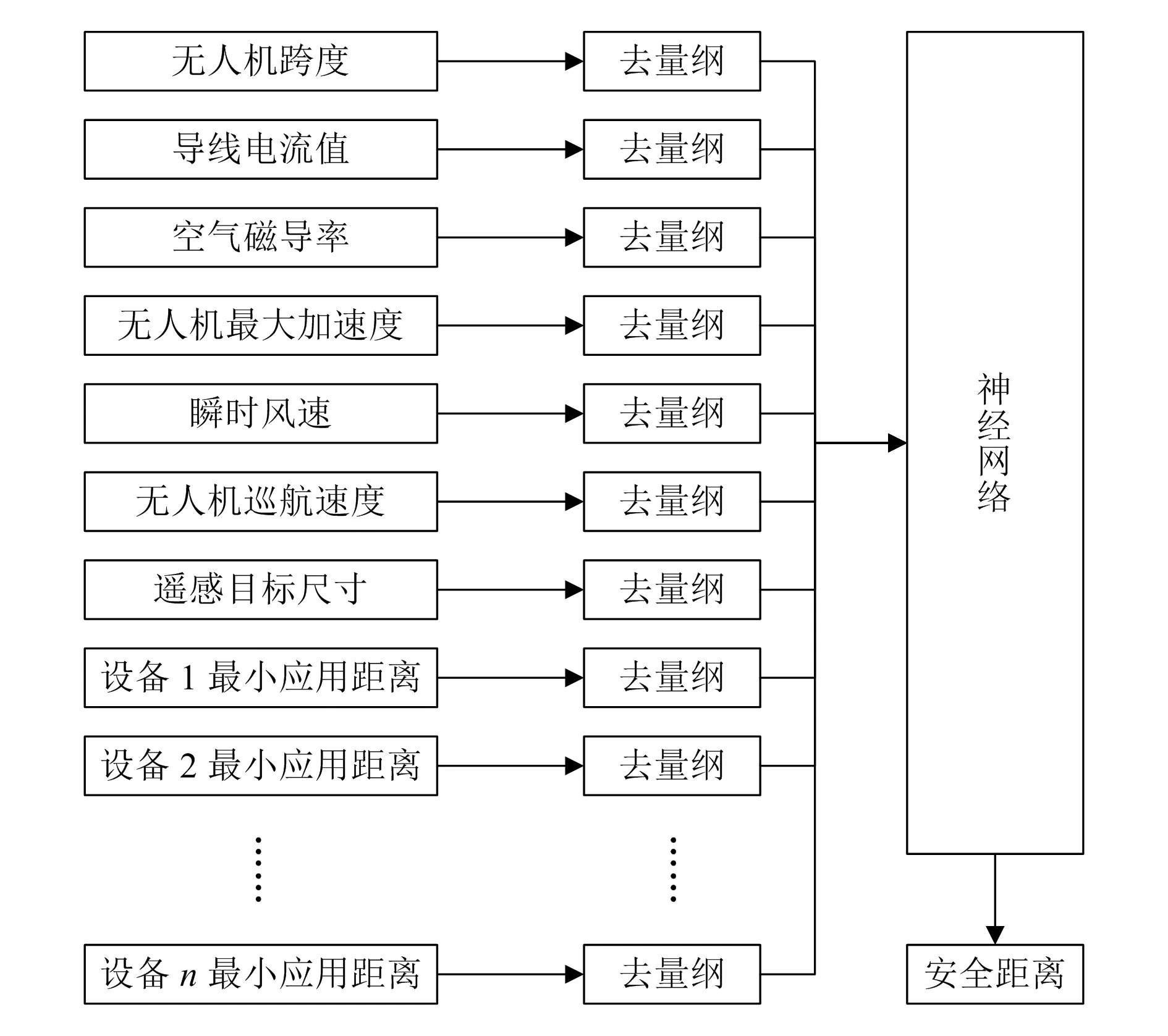
图4 基于神经网络的机器学习技术在数据融合中的应用
图4中,输入数据并未包含上述3个故障树中的无人机巡航路径点沿输电线路法线方向至输电线路的距离。因为输入数值属于求解数值,那么无人机巡航路径点到输电线路的距离必须大于用基于机器学习的数据融合模式计算出的安全距离。该模式将所有输入数据进行去量纲归一化后,输入一个神经网络模块和安全距离带量纲值。

表3中,共设计了7层隐藏层,其中:第1,2,3层的统计学意义是将输入数据充分整理,使其初步融合,所以其应使用多项式函数进行节点函数设计;第4,5层的统计学意义是将数据细节充分放大,使集中在数轴0点附近的数据充分向右扩散,且不影响数据之间的顺序和逻辑关系,所以其应采用对数函数进行节点设计,在节点函数中,e取近似值2.718 281 8;第6,7层的统计学意义是将前面步骤充分规整和放大的数据关系进行状态空间叠加治理,使数据进一步融合,所以其节点函数使用线性函数进行治理。
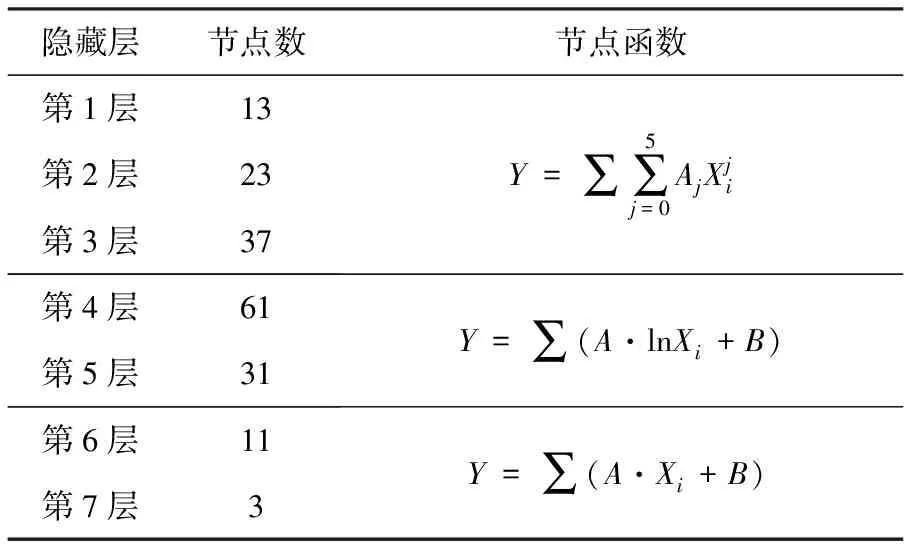
表3 神经网络模块设计细节表
在神经网络之前的去量纲模块中,针对所有整列数据,均采用Z-Score进行归一化处理,即判断每个输入值与平均值的差值与整列数据标准差的比值:
(6)
式中:Y输为归一化输出值;μ1为整列数据的平均值;σ为整列数据的标准差。
为了实现对无人机秒级主动避障控制,无人机每秒至少要获得200个周期的相关数据,即无人机的自动避障数据采集频率大于200 Hz。如果用于数据判断的整列数据引用最新100个数据记录,那么其实际数据预热时间为0.5 s,在实际飞行过程中,其对避障参数的判断周期同样稳定在200 Hz以上。
3 两种安全距离判断算法的仿真结果比较
本文在Simulink仿真平台上,采用传统方案和神经网络方案对无人机巡检±500 kV输电线路的安全距离判断能力进行仿真,然后对结果进行对比分析。在最小距离的判断领域,其数据结果见表4。
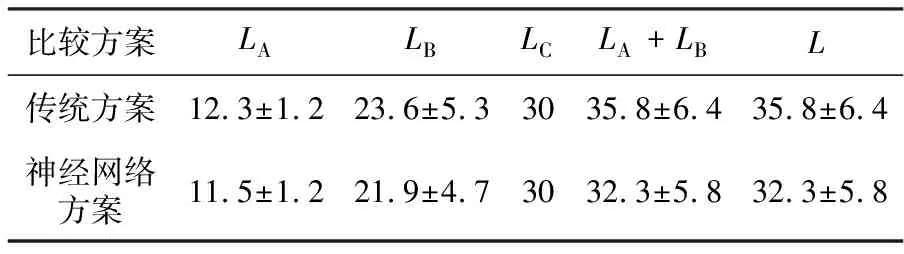
表4 最小距离判断结果的对比表 单位:m
表4中,除查表获得的LC外,用神经网络方案算得的LA、LB及(LA+LB)和L,均较传统方案有一定程度的减小。因为无人机实际控制最小巡航距离要大于而非等于L,所以用该改进型神经网络安全距离判断方案得出的L值应小于传统方案的L值,平均缩小幅度为3.5 m。该空间的缩小可以充分提升无人机的调度自由度。
因为无人机嵌入式系统的计算能力远小于桌面级工作站和机架式计算主机,所以应对本文模型在无人机嵌入式系统中的响应表现进行研究,一方面确保其数据计算周期不超过200 Hz条件下的时间间隔(即5 ms),另一方面应保持计算资源的适度冗余,以确保无人机巡航过程中主控嵌入式系统不至于宕机。试验用无人机的机载嵌入板系统包含1个全志A31处理器(计算核心为4个ARM-A7处理核心),1个ARM MALI-400MP2浮点处理器(GPU)(计算核心为8个MALI处理核心),1个DDR3的2 GB动态处理器。
2个方案中,其系统占用量和响应速度见表5。
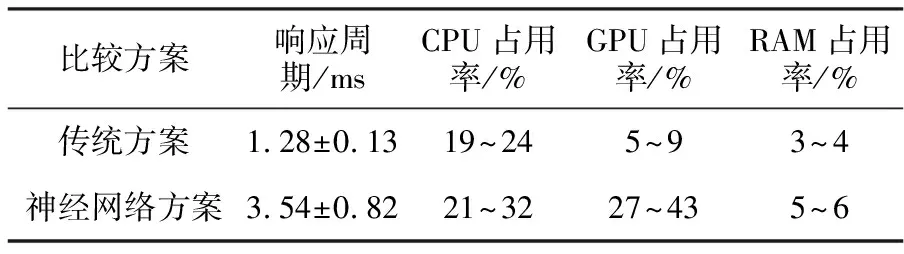
表5 系统资源利用情况对比表
表5中,虽然神经网络方案的响应周期略长于传统方案,但可以将响应周期稳定在5 ms以内且保留了一定的系统冗余;虽然神经网络方案的CPU、GPU、RAM占用率均高于传统方案,但系统计算资源仍足够冗余并可以保障系统稳定运行。为了进一步提升系统性能,可以在无人机系统中部署专用嵌入板实现对该算法的运行,或进一步提升嵌入系统的算力。
4 结束语
通过数据融合算法的革新,本文在确保无人机嵌入设备算力冗余的前提下,实现了基于神经网络的电力巡线无人机安全距离动态确认方法。通过对算法的仿真对比可以看出,该算法能较大程度缩小人机安全距离保护范围和保护区,为无人机作业空间提供了一定数据支持。
