基于北斗系统的军用工程机械群位置信息采集与传输系统设计
2022-12-11赵华琛苏正炼王海涛孙志丹申金星
赵华琛,苏正炼,王海涛,孙志丹,申金星
(陆军工程大学 野战工程学院,南京 210007)
0 引言
随着我国国防事业的发展,以军用工程机械群为基础,开设和构筑部队作战所依存的高强度、多样化、大范围的作战保障工程,将成为工程部队的主要任务之一[1]。因此,加强军用工程机械位置采集系统的研究与设计,便于指挥端信息互联、辅助决策和指挥调度,对提升我军工程机械群遂行工程保障任务的能力具有十分重要的作用,对提升民用工程机械群实施工程建设具有较强的参考价值[2]。
2020年6月,随着“北斗三号”最后一颗组网卫星正式入网运行,标志着我国“北斗三号”卫星系统完成组网,可在全球范围内为用户提供导航、授时、定位服务[3]。北斗的特色功能之一——短报文功能,可支持用户与地面控制中心、用户与用户之间的双向点对点的传输[4]。随着短报文功能的升级,在特批情况下频次可达到30秒/240字符/次,实现指令的快速下达[5]。着眼当前国际形势,出于军事安全和技术前瞻的考虑,本课题选择北斗系统来实现工程机械的位置定位及信息传送。
1 系统总体结构设计
1.1 基本需求分析
军用工程机械群位置更新的基本需求包括:
1)通过北斗模块接收北斗卫星发播的信号,获取机械实时的位置信息,进行自身定位;
2)通过显示模块,将机械自身的实时位置在车载显示屏上显示出来;
3)将定位信息通过北斗系统发送给指挥机构。
1.2 总体结构设计
根据基本需求,设计整个位置信息采集与传输系统的总体结构如图1所示。
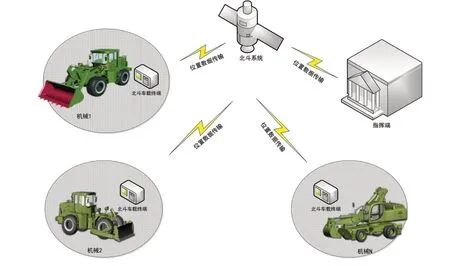
图1 军用工程机械群位置信息采集与传输系统总体结构
其中,每台机械上都安装有基于北斗系统的车载智能终端,它是实现信息采集、信息传输和指挥调度的核心设备,由通信、北斗、传感器、CAN总线、控制和显示等模块组成。其具体组成如图2所示。
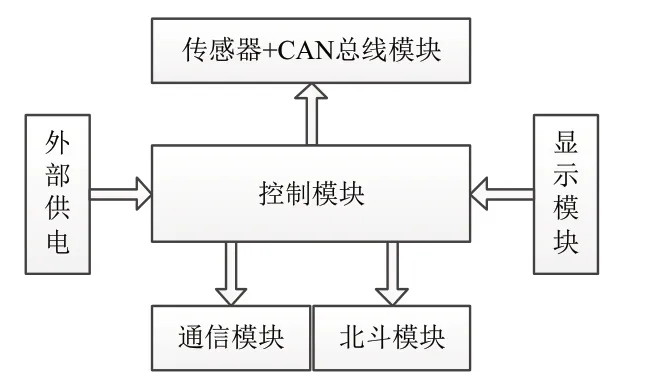
图2 基于北斗系统的车载智能终端的简化结构
2 硬件平台设计
2.1 北斗模块
北斗模块需同时集成定位功能和短报文通信功能[6],综合尺寸、功率、价格和性能等因素,选择AGM1221A北斗模块。AGM1221A北斗模块是一款基于北斗二代卫星通信标准设计的集成收发、定位功能的一体化模块,该模块采用爱洁隆公司自主研制的北斗二代射频芯片,在50×60×10mm的体积上集成了北斗二代的基带芯片、射频芯片、低噪放、4W功放、SIM卡座等功能组件,具有体积小、功耗低、通信成功率高、结构紧凑等特点,其外形如图3所示,技术指标如表1所示。

图3 AGM1221A北斗模块外形图
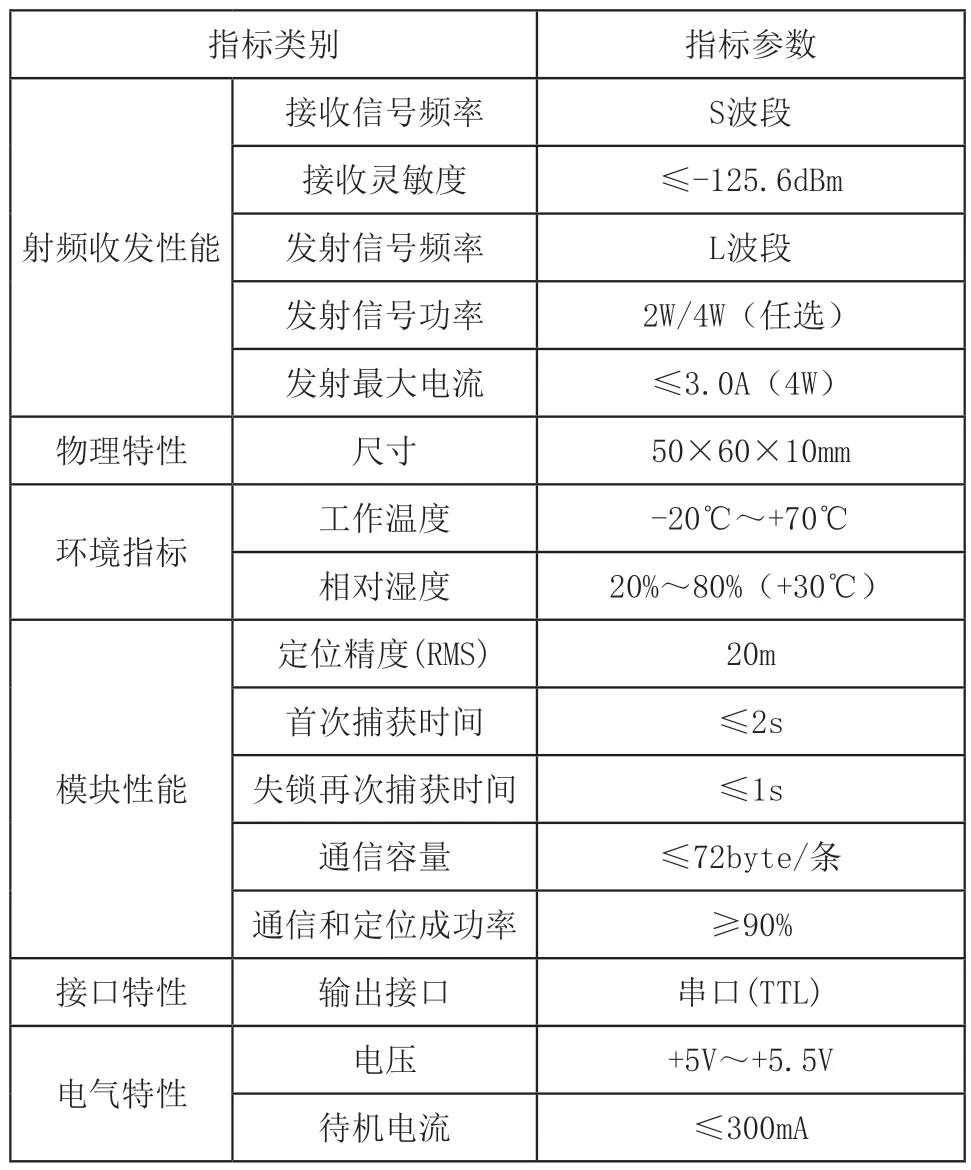
表1 AGM1221A北斗模块的技术指标
AGM1221A北斗模块的原理结构如图4所示,该模块集成了低噪放(LNA)、可配置的串口(TTL)、射频芯片和基带芯片等,其中LNA外接无源天线,用于数据接收和发送;TTL串口连接控制模块芯片,用于控制模块与北斗模块的通信,实现北斗二代的定位、短报文通信等功能,其波特率可由用户自行配置,默认为115200bps。
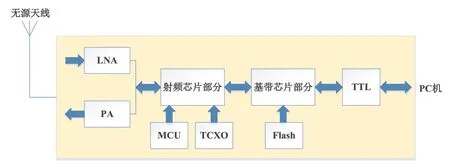
图4 AGM1221A北斗模块原理结构图
2.2 控制模块
控制模块是车载智能终端的控制中枢,实现对不同模块的硬件操作、逻辑处理和协议转换等。STM32F103C8T6嵌入式芯片是意法半导体(ST)公司开发的单片机,具有性能强大、稳定性好、扩展性强及通信接口丰富等优点,因此选择STM32F103C8T6芯片作为控制模块的核心处理器。
根据车载智能终端的功能需求、模块配置以及各指令的运行规范,定义STM32F103C8T6芯片引脚在控制模块中的功能配置如图5所示。
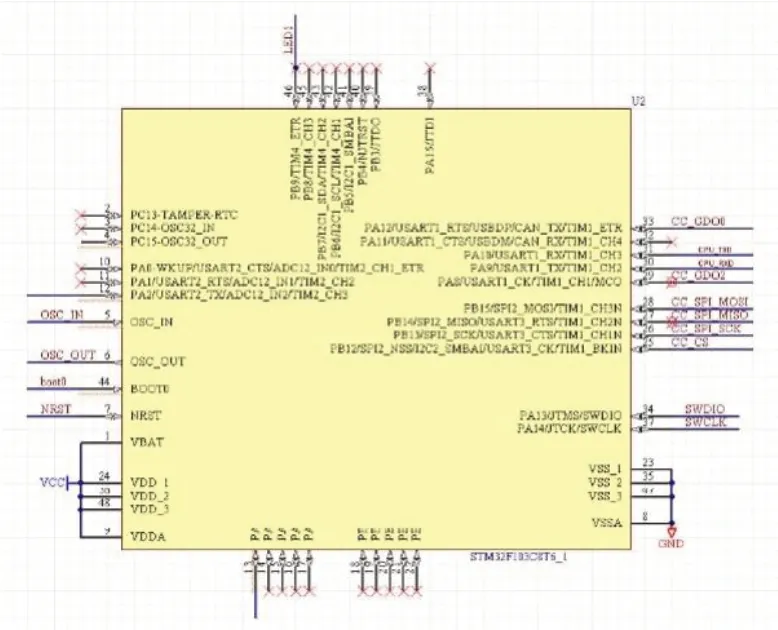
图5 STM32F103C8T6引脚的功能配置
2.3 通信模块
该模块采用ME909S-821无线通信模块,适合远距离传输,采用Mini PCIE封装,提供最高下行1Gbps和上行100Mbps的传输速率,内嵌TCP/IP协议栈,提供UART结构,能够很好地实现文本、语音和视频等信息的传输。ME909S-821无线通信的设计电路图如图6所示。
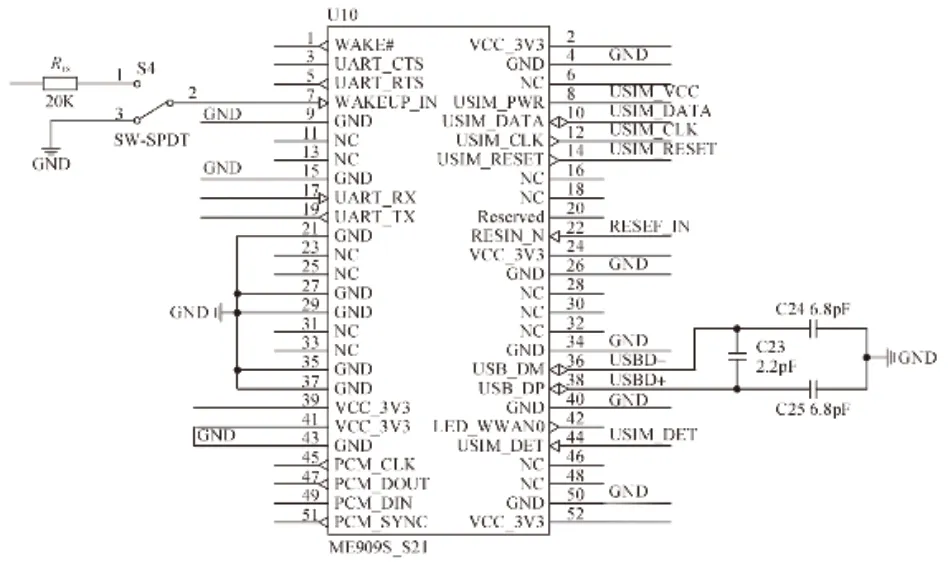
图6 ME909S-821无线通信模块电路原理图
其中,RXD和TXD引脚分别与STM32F103C8T6控制芯片的TX和RX引脚相连,实现信息的收发,其网络建立及数据发送流程如图7所示。

图7 无线通信网络连通及数据发送流程图
1)系统初始化:模块上电后,完成模块状态、SIM卡状态的检测和波特率、通信方式的设置,以及打开串口等初始化工作;
2)构建通信网络:通过AP指令建立一个具有公网IP的TCP服务器,并设置好端口号;
3)构建网络连接:通过服务器公网IP地址及相应的端口号建立网络连接,并开启TCP数据透明传输模式;
4)数据传输:通过串口将指挥调度指令信息发送到服务器上,从而实现信息的实施传输。
2.4 电源模块
该系统主要采用12V、5V、3.3V三种电源。其中,12V为外接电源,5V主要用于显示模块的供电,3.3V主要用于控制模块、北斗模块、通信模块的供电。
3 数据传输系统设计
3.1 数据传输流程
车载智能终端和指挥控制终端对装备位置数据信息进行采集和传输是通过调用北斗模块完成的,其流程如图8所示。
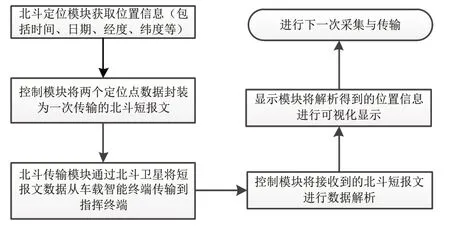
图8 装备位置信息的采集与传输流程
上述流程的具体实现是通过嵌入到STM32F103C8T6芯片内的程序来实现的。通过上述流程,在车载智能终端和指挥控制终端能够实时可视化显示所有装备的当前位置信息,从而便于指挥员掌握装备的分布情况,并及时进行指挥调度。
3.2 数据传输格式
北斗模块AGM1221A上电后,会根据北斗SIM卡的用户级别,每隔一定时间返回一定格式的数据帧,并通过北斗短报文功能将数据传输到指挥机构的指挥终端上进行解析并显示,从而便于指挥机构实时掌握每台机械的位置信息。定义其数据格式如图9所示。

图9 位置信息传输格式示意图
可以表示为:

式中,Start表示起始字符,id表示设备编号,time表示时间,date表示日期,longitude表示经度,latitude表示纬度,End表示结束字符。
如“$5123501.55200818253.21782118.45522 *”,其中,第1位“$”表示每帧的起始字符;第2位“5”表示各装备北斗模块的编号;第3~11位“123501.55”表示当前时间为12时35分01秒550毫秒,精度已达0.01秒;第12~17位“200818”表示当前日期为20年08月18日;第18~26位“253.21782”表示东经253.21782°,折算成“度/分/秒/毫秒”的形式为253°13'41.52'',精度已达0.01毫秒;第27~35位“118.45522”表示北纬118.45522°;第36位“*”表示每帧的结束标识符。因此,每帧的长度为36Byte,那么一次北斗短报文传输的容量为72Byte,则可包含两个采样周期的位置数据,这样能提高装备位置信息的采样精度。
4 系统测试
课题组以构筑100m长度的急造军路为基本任务,开展了功能和性能测试。经功能测试,工程机械群位置显示、装备历史轨迹查询等功能齐全,可以满足军用工程机械群指挥调度的需要。具体功能界面如图10、图11所示;经性能测试,数据传输基本稳定,软件及设备使用较为便捷,可靠性能基本达到研究预期。
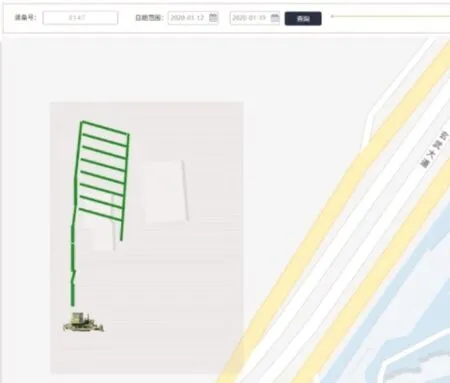
图10 单个工程机械历史轨迹显示界面(指挥端)

图11 单个工程机械当前和目标位置显示界面(车载端)
5 结语
本文针对军用工程机械群遂行大型工程保障任务时出现的各机械位置不明、动向不清等指挥管理问题,设计了一种基于北斗系统的军用工程机械群位置信息采集与传输系统,并进行了相关理论分析和方案设计。文中经过综合比较,选择了AGM1221A北斗模块来实现装备位置信息的传输,并定义了数据传输格式,完成了数据传输流程的详细设计,实现了通过北斗短报文功能进行位置信息的采集、传输与显示,并最终呈现出机械群整体态势显示、单个机械历史轨迹查询等界面,进一步增强了对作业现场的管控,提升了整体指挥调度效率。
