基于树莓派的无人机吊装测量系统
2022-12-10乌云娜曹利赛王秋爽
乌云娜, 曹利赛, 路 鹏, 王秋爽
(吉林大学 a. 大数据和网络管理中心, 长春 130012; b. 地球探测科学与技术学院, 长春 130062; c. 计算机科学与技术学院, 长春 130012)
0 引 言
近年无人机技术迅速发展, 应用领域愈加丰富, 尤其是在区域广阔、 环境复杂的场景应用更为广泛。目前已有许多研究机构成功开发了适应不同环境与应用场景的无人机以及相关装置, 但针对无法近距离接触的物体三维测量特殊应用场景的无人机装置研究却很少[1-2]。由于此类场景通常是采用人工方式进行的, 因此工作效率较低, 并且人员安全风险却非常高。为此, 笔者提出一种基于树莓派的无人机吊装测量系统, 采用级联树莓派构建图传和数传一体链路模式, 结合电动伸缩杆、 双目摄像头、 激光传感器等模块实现场景信息收集与运动控制, 从而实现特殊场景下无法近距离接触的物体三维精准测量任务。
1 系统实现原理
1.1 气动伸缩机构原理
气动技术通过压缩空气实现能量或信号传输, 从而进行生产控制以及自动控制。气动伸缩机构的基本工作原理是当伸缩杆展开时, 通过电机旋转驱动气体压缩机工作, 将气体压缩并进行存储, 然后通过压力调节阀控制气体在多节密封的伸缩中的运动, 在气压和重力的作用下, 实现伸缩杆的平稳伸长; 当伸缩杆收缩时, 通过泄压降低机构内部压强, 然后利用电机带动拖拽钢丝(连接牵引辊和最后一节伸缩筒末端)实现伸缩机构收缩[3]。气动伸缩机构在航天航海、 核工业、 微电子、 生物技术等领域中应用比较广泛。
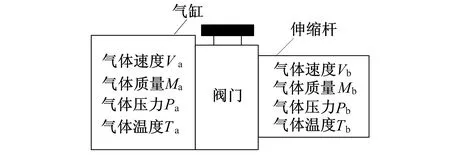
图1 气动伸缩机构的结构图Fig.1 Structure diagram of pneumatic telescopic mechanism
气动伸缩机构的工作原理如图1所示,Pa为气缸内气压压力,Ta为气缸内气体绝对温度,Va为气缸体积,Ma为气缸质量,Pb为伸缩杆内气压压力,Tb为伸缩杆内气体绝对温度,Vb为伸缩杆体积,Mb为伸缩杆质量。设定气体为理想气体, 并且气缸、 阀门以及伸缩杆不发生气体泄露, 气体通过阀门从气缸流入伸缩杆内部的过程可看作等熵流动, 即气体与外界热交换可忽略, 并且是稳定的一元流动。根据热力学第一定律, 可得
Ud+Wd+m= 0
(1)
其中Ud为气体内能变量,Wd为气体所作的膨胀功(包括伸缩杆的动能以及摩擦力所作的功),m为从气缸流出的气体能量, 且有
Ud=cvd(TaMb)
(2)
Wd=PadVb
(3)
m=(cv+R)TaMd
(4)
其中cv为定容比热,R为空气的气体常数,R=287.1 J/(kg·K)。
经过分析, 得到伸缩杆的充气方程如下

(5)
其中Au为阀门的有效面积,k为气体的多变指数, 自然空气k=1.4。
1.2 双目成像三维建模
双目成像三维建模是利用双目相机获取的两幅图像构建三维场景信息, 从而实现场景中实际物体的尺寸测量[4-6]。双目成像三维建模的基本原理如图2所示。
双目镜头的相机内部参数一致, 其中f为焦距,d为两台相机距离, 并保证两台相机的光轴平行, 且在同一平面中重合。同一时刻空间物体的同一特征点P(Xp,Yp,Zp)在两台相机上影像对应的坐标分别为Pc1(Xc1,Yc1)和Pc2(Xc2,Yc2)。定义另两个相机图像的视差为S=Xc1-Xc2, 利用视差可计算出同一特征点P在相机坐标下的坐标值为(Xp,Yp,Zp), 即

图2 双目成像三维视觉原理Fig.2 Principle of binocular imaging 3D vision
同理可得Q点坐标(XQ,YQ,ZQ)。因此,P点到Q点的长度为

(9)
2 系统设计
2.1 结构设计
无人机吊装尺寸测量工具的系统整体框架如图3所示, 其由动力系统、 图像传输/数据传输(简称图传/数传)一体链路、 定位及高度采集、 电动伸缩杆以及物体三维测量等5部分组成。
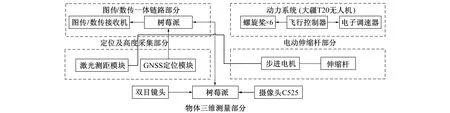
图3 系统架构图Fig.3 The system block diagram
2.1.1 动力系统部分
无人机型号为大疆T20植保无人机, 标准起飞重量为42.6 kg, 最大载重21.5 kg; 悬停精度水平±10 cm, 垂直±10 cm; 机架最大轴距1 883 mm; 动力系统螺旋桨直径83.8 cm, 质量90 g; 动力系统电机KV(Kinetic Voltage)值75 rV/m, 最大功率2 400 W/旋翼, 最大拉力13.5 kg/旋翼; 飞控传输协议为OcuSync 2.0版本, 信号有效距离为5 km。为支撑后续改装工作, 特别移除无人机原有喷洒系统。
2.1.2 图像传输/数据传输级联链路部分
图像传输控制部分的树莓派与物体三维测量部分的树莓派组建无人机空中网络, 支持相互数据通信, 并与图像传输/数据传输接收机、 地面控制终端共同形成图传/数传一体化链路, 如图4所示。

图4 图传和数传级联链路机制Fig.4 Image and data transmission cascaded link mechanism
树莓派型号为Raspberry Pi4, 主芯片为1.5 GHz ARM, 4 GByte内存, 128 GByte存储空间。物体三维测量部分的摄像头C525的实时监控视频可通过树莓派网络与图传/数传接收机将视频信息展示在地面控制终端上。地面控制终端可以将物体三维测量控制信号通过图传/数传一体链路将控制信息传递给物体三维测量部分的树莓派, 从而实现双目镜头的控制操作。
2.1.3 定位及高度采集部分
定位及高度采集部分主要是实现无人机飞行高度以及地理经纬度信息的数据采集, 方便后续数据分析计算。定位采集部分主要是依托GNSS (Global Navigation Satellite System)模块实现, 支持GPS(Global Positioning System)、 北斗以及伽利略多重卫星系统, 采用L76B模组和有源陶瓷天线, 水平定位精度定位小于2.5 mCEP, 支持UART(Universal Asynchronous Receiver/Transmitter)通信接口。
高度采集部分应用LMS200型脉冲法激光测距模块, 扫描角度0~180o, 探测距离100 m, 测量精度±2 cm, 具备间隔短、 测距远等优点[7]。半导体激光二极管通过发射激光脉冲到达被测量目标, 目标漫反射回的激光由光学元件进行接收, 通过测量发射与接收的时间差, 计算无人机飞行高度信息。其计算公式为
(10)
其中C0为光速,C0=3×108m/s,T为测距间隔时长。
2.1.4 电动伸缩杆部分
电动伸缩杆部分由驱动电机、 伸缩筒、 气缸和牵引辊等组成, 如图5所示。伸缩筒主要有4节, 主要采用3D打印方式进行ABS(Acrylonitrile Butadiene Styrene copolymers)轻质材料打印, 从小到大逐步装配, 直径小的伸缩筒传入直径大的伸缩筒, 穿出后在直径小的伸缩筒前端装上返回限位套。在两节伸缩筒之间设置密封圈, 保证气体不会泄露。电动伸缩筒通过电机控制气缸以及牵引辊实现多级伸缩筒的垂直伸开或收缩。

图5 电动伸缩杆示意图Fig.5 Schematic diagram of electric telescopic rod
2.1.5 物体三维测量部分
物体三维测量部分由树莓派、 监测镜头、 双目镜头组成, 其中树莓派起到控制双目镜头拍摄、 存储与管理双目镜头数据、 监测镜头图像目标识别的作用, 其型号与上述树莓派型号相同。监测镜头是地面图传信息的输入信号, 型号为索尼C525, 具有800万像素分辨率, 支持自动对焦和自动调光, 具有较强的抗震动能力。双目镜头分辨率为640×480像素, 水平视场角为60°, 垂直视场角为48°, 两摄像头水平距离55 mm。
2.2 软件设计
软件设计包括无人机-地面站控制和双目镜头三维建模及测量分析软件两部分。
2.2.1 无人机-地面站控制软件
无人机-地面站控制软件的整体流程如图6所示, 首先通过实时收取无人机GNSS信息、 高度信息以及图传信息, 控制无人机飞行到预定地点悬停; 动态控制电动伸缩杆伸展, 同时利用目标识别技术进行目标物体识别, 直到找到目标物体或达到伸缩杆最大伸展长度; 远程控制双目镜头进行图像录制, 并将数据存储于树莓派存储媒介中。
目标识别算法基于OpenCV实现, 包括Lab空间转换、K-means分割算法、 形态学处理等步骤[8-10]。Lab空间转换是将RGB彩色图像转换成L、a、b坐标分量表示, 其中L分量表示亮度信息,a分量表示颜色从绿到红的程度,b分量表示由蓝色到黄色的程度。K-means聚类分割算法是聚类分析算法之一, 基于欧氏距离判断像素是否归属同一分类, 通常认为两个目标的距离越近, 相似度越大。形态学处理包括中值滤波去噪、 膨胀腐蚀填充孔洞等方法, 从而使目标提取效果更好。
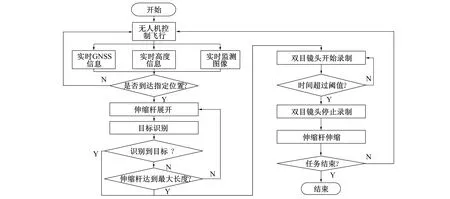
图6 无人机-地面站控制软件流程图Fig.6 Flowchart of UAV-Ground Station Control Software
2.2.2 双目镜头三维建模及测量分析软件
双目镜头三维建模及测量分析软件操作流程如图7所示, 首先需要导入双目镜头图像, 然后逐帧进行图像数据校正、 图像数据配准和图像三维建模[11-12]。在三维建模基础上支持用户在界面上进行手工点击两空间点进行距离计算和尺寸测量。为了提升软件处理速度, 算法采用OpenACC框架进行代码并行GPU(Graphics Processing Unit)加速, 这能降低图像配准和三维建模时长。
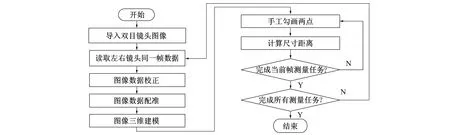
图7 双目镜头三维建模及测量分析软件流程图Fig.7 Flowchart of binocular lens 3D modeling and measurement analysis software
3 实验测试结果及分析
无人机吊装测量系统如图8a所示, 将其在野外农业玉米农田中进行玉米棒长宽尺寸测量, 如图8b所示。无人机吊装测量系统能迅速飞行到指定位置上空悬停, 并动态控制电动伸缩杆与双目摄像头, 完成玉米棒目标环境的图像视频采集工作。

图8 无人机吊装测量系统实物图及野外飞行Fig.8 Physical unit and field flight image of UAV hoisting measurement system
双目镜头三维建模及测量分析软件的运行界面如图9所示, 允许进行手工标点并计算距离信息。软件测量数据与实际真实值对比分析结果如表1所示, 通过误差分析可知无人机吊装测量系统的平均误差在1%左右, 运行效果良好, 符合预期目标。

图9 双目镜头三维建模及测量分析软件界面(单位: m)Fig.9 Software Interface of binocular lens 3D modeling and measurement analysis software(unit: m)
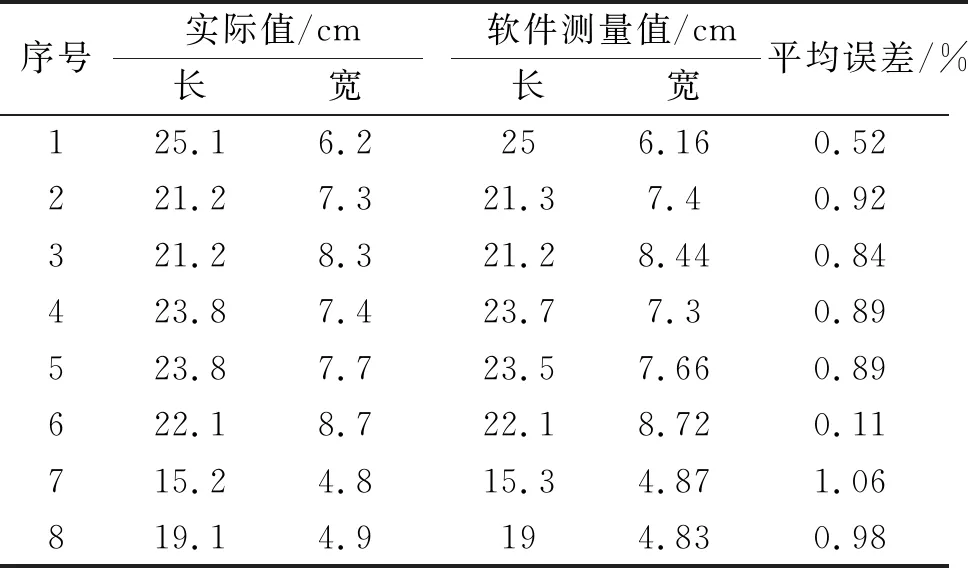
表1 实验测试结果
4 结 语
基于树莓派的无人机吊装测量系统, 采用级联树莓派建立图传和数传一体链路模式, 结合电动伸缩杆、 双目摄像头、 激光传感器等模块实现场景信息收集与运动控制, 从而实现物体三维精准测量, 解决特殊场景下无法近距离接触的物体三维测量的问题。本实验装置除在农业领域进行应用外, 还可在交通领域、 林业领域中进行推广应用, 具有广阔的应用价值和市场前景。
