城市轨道交通全自动运行系统列车蠕动模式设计与实现*
2022-12-10郎永强
郎永强
(深圳市地铁集团有限公司, 518035, 深圳∥工程师)
1 FAO列车的牵引及制动控制
在城市轨道交通FAO(全自动运行)线路中,列车以FAM(全自动运行模式)运行。FAM下信号系统的ATP(列车自动防护)子系统保证列车的运行安全,ATO(列车自动运行)子系统负责控制列车在站台自动发车、站间自动运行、自动广播、自动对位停车、自动开关门等操作,此时列车的牵引/制动控制指令及对应的控制级位信息由信号系统发送。正常情况下,列车的方向指令、牵引/控制指令由信号系统的CC(车载控制器)通过I/O(输入/输出)接口进行控制,由车辆系统的TCMS(列车控制和管理系统)对指令进行采集,牵引/制动的级位信息通过网络协议给出。
FAM下CC的牵引/制动级位信息传递如图1所示。CC将牵引/制动级位信号通过网络协议发送给TCMS。TCMS将该信息分别转发至车辆的牵引控制单元及制动控制单元。当列车出现停车对标不准时,信号系统通过对牵引/制动级位的调整来实现列车到站自动对位停车,此时列车应响应信号系统的精细化调整策略,以实现车门与站台门的精确对标。
FAM下若出现网络故障,列车将不能继续通过网络途径发送牵引/制动级位信息,此时需要通过采用硬线信号设备实现牵引/制动级位信息的传递,以确保区间内的列车可维持运行至下一站。
此外,当网络发生故障时不能对列车状态进行实时监控,需命令列车限速运行,以提高行车安全性。针对网络故障带来的风险及影响,FAO命令列车采用CAM(蠕动模式)运行,以解决此问题。即:当车辆网络发生故障或车辆与CC间发生通信故障时,列车将向OCC(运营控制中心)申请进入CAM。列车停车后经OCC行调确认,列车由FAM转为CAM。CAM下ATP监控列车以不超过25 km/h的速度自动运行至车站对标停车后扣车,列车自动打开车门完成乘客的乘降作业,随后在站台等待工作人员上车对故障进行处理。
2 列车申请进入CAM的条件
典型的FAO列车网络拓扑如图2所示。与行车及牵引/制动控制相关的关键网络结构由3个部分组成:① 由TCMS管理的列车级MVB网;② 信号系统内部通信的红蓝网;③ 制动CAN(控制器局域网)。其中,制动CAN用于制动控制单元指令的执行及故障诊断。任一网络发生故障,都将影响列车的正常牵引/制动控制功能,可据此分析列车申请进入CAM的条件。
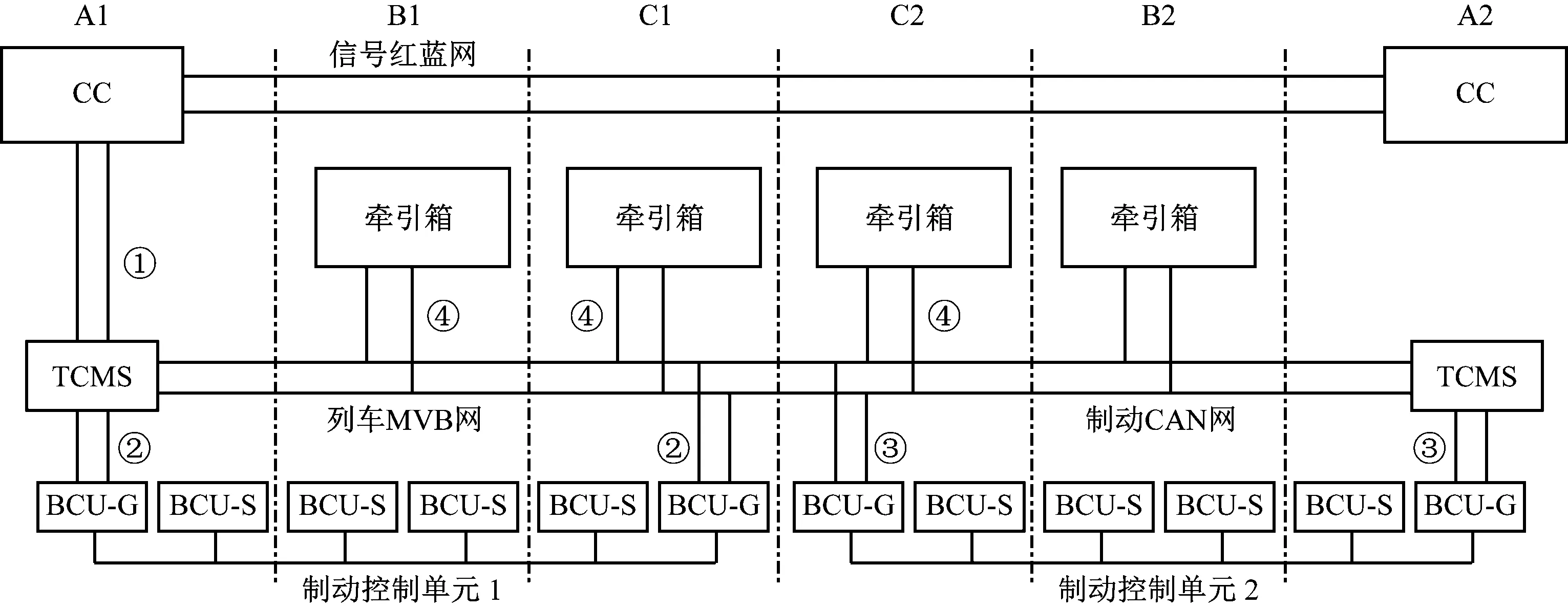
注:A1、A2、B1、B2、C1、C2——分别代表6节编组列车不同的车厢编号;BCU-G——制动控制单元网关阀;BCU-S——制动控制单元智能阀;①——信号与TCMS的接口;②——TCMS与制动控制单元1的网络接口;③——TCMS与制动控制单元2的网络接口;④——TCMS与牵引控制单元的网络接口。
2.1 TCMS与CC间通信中断
FAM下TCMS与CC的网络连接接口故障,或TCMS的2个VCU(车载控制单元)均发生严重故障时,将会导致列车无法继续通过网络途径进行列车的牵引/制动控制。该故障的判定条件为:通过TCMS与CC之间互相检测生命周期信号,在互相设定的时间(如8个生命周期)内检测不到生命信号,则可判断为二者间通信故障。
TCMS与CC间若发生通信故障,列车将触发紧急制动,此时CC向OCC行调申请进入CAM。OCC行调下发授权指令后,列车进入CAM。此时牵引/制动系统将切换至接收CC的硬线设备级位信号,并执行与之对应的牵引/制动级位信息输出。
2.2 TCMS严重故障
当监视列车运行及控制列车的关键采集模块故障时,列车也无法通过网络模式继续控制前行。FAM下出现以下任意一种场景下的I/O模块故障,都被视为TCMS严重故障:①图2的A1端TCMS某个I/O模块机箱A网、B网同时离线;②图2的A2端TCMS某个I/O模块机箱A网、B网同时离线。TCMS发生严重故障时,将触发紧急制动并申请进入CAM。CC施加紧急制动令列车停车后,向OCC行调申请进入CAM。经过OCC行调确认后,CC向列车发出CAM信号,列车进入CAM。
2.3 牵引网络通信故障
FAM下若车辆牵引系统不能通过网络接口正常响应列车的牵引级位,则无法继续满足列车的运行需求,此时列车需要尝试以CAM继续运行至下一站。以6节编组FAO列车为例,当TCMS判断出与之相连的3个及以上牵引系统发生通讯故障时,TCMS触发紧急制动并申请进入CAM,CC施加紧急制动停车后向OCC申请进入CAM。经过OCC行调确认后,CC向列车发出CAM模式信号,列车进入CAM。
2.4 制动网络通信故障
FAM下若TCMS判断出与之相连的3个及以上车辆制动系统发生通讯故障,其应对措施与牵引网络通信故障时的措施相同。
3 CAM下列车牵引/制动级位控制方式
列车申请进入CAM后,要实现CAM动车功能,除了获取轨旁的移动授权外,列车上需要具备如下指令/信息,才能进行行车控制:①CAM指令(授权列车进入CAM);②方向向前指令(提供前进信号);③牵引指令(对列车发出牵引命令);④制动指令(对列车发出制动命令);⑤牵引/制动级位(提供列车发挥牵引/制动力大小的控制指令)信息。其中:CAM指令是列车进入CAM的条件;CAM方向指令、牵引指令及制动指令与FAM间均采用相同的硬线连接;牵引/制动级位信息在进入CAM时需要通过硬线接口通道替代原来的网络接口通道。
实现硬线控制牵引/制动级位信息的传输,其方式主要有0/1数字编码信号控制、PWM(脉宽调制)编码信号控制两种。这两种方式因接口存在差异性,所需的设备也存在差异。
3.1 数字编码控制
图3为0/1数字编码信号控制方式示意图,信号系统发出3根硬线组合的0/1编码信号,将牵引/制动级位信号输出至车辆的牵引/制动系统。其中:牵引系统依据0/1编码不同的组合响应不同的牵引控制级位,考虑到CAM的控制需要,牵引系统通常采用4级调速;制动系统依据0/1编码不同的组合响应不同的制动控制级位,按照CAM的控制需要,制动系统通常采用7级调速。信号系统通过此级位控制方式控制列车运行至下一站,列车精确停车后打开列车车门。
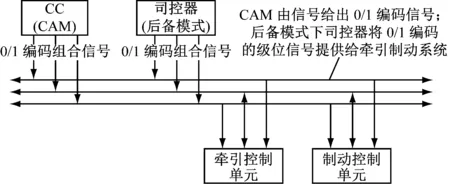
图3 0/1数字编码信号控制示意图
司机在手动驾驶并使用后备模式时,司控器也采用3根硬线控制的0/1编码信号控制列车运行,以确保牵引/制动系统与CAM接口的一致性。
3.2 PWM编码信号控制
图4为PWM编码信号控制方式示意图,信号系统将0~20 mA的电流信号发送至车辆的PWM编码器,车辆采集到该信号后将该信号转换成PWM方波信号传送给牵引/制动系统。每个牵引控制器内均配有对应的PWM解码器,用以对PWM编码信号进行解码,实现对牵引级位信息的响应。每个制动控制单元内均配有相应的用于处理PWM编码信号的解码模块,可对PWM编码的级位信号进行解码,以响应对应的制动控制级位请求信号。
司机在手动驾驶并使用后备模式时,司控器的级位信号将同步输出至PWM编码器。PWM编码器将该信号进行编码后发送给牵引/制动系统,牵引/制动系统再进行对应的解码。
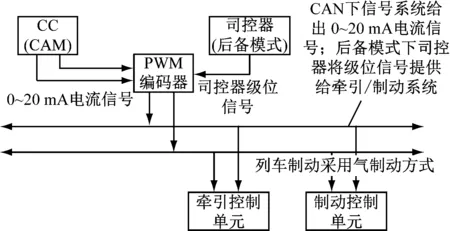
图4 PWM编码信号控制示意图
3.3 两种控制方式的差异分析
从功能应用上看,二者基本一致,均能实现列车的精确停车对标,且能满足CAM下列车运行至下一个载客站台进行清客,以及人工登车接管处置列车的功能需求。
两种控制方式在设备上存在一定的差异,PWM编码信号控制方式需要列车新增编码器及解码器,且对司控器、牵引、制动等提出更高的配置需求:司控器需增加PWM编码器,数量为2套/列;牵引控制系统需增加PWM解码器,数量为6套/列;制动控制系统需增加网关阀及I/O模块,数量为6套/列。因此,与0/1数字编码信号控制方式所需费用相比,PWM编码信号控制方式整体投入的费用更大。此外,PWM编码信号控制方式在设备的全寿命周期维护管理上也需要付出更多。
综上所述,与PWM编码信号控制方式相比,0/1编码信号控制方式具有更强的适用性及经济性,因此,该方式在FAO项目中得以广泛应用。
4 结语
CAM作为一种应对FAO下控制网络故障的降级模式,在实施过程中需要厘清其启动的条件。在选择CAM的实施方式时,需在确保实现CAM功能的基础上考虑实施方案的经济及匹配性。应选用可靠、简洁的技术实施方案,保障网络故障的降级模式下列车可进站完成对标停车,最大限度降低因列车降级运行对运营产生的影响。
