城市轨道交通站台门间隙探测系统的信号控制逻辑分析
2022-12-10曹启滨
曹启滨
(北京市地铁运营有限公司, 100044, 北京∥高级工程师)
城市轨道交通车站站台门、列车车门(以下简称“双门”)的间隙存在着夹人夹物的安全隐患。当城市轨道交通线路采用FAO(全自动运行)模式时,列车和站台均取消了人工瞭望确认作业。双门间无机械或电气的直接控制接口,由信号系统控制双门的开关门联动。信号系统仅作为全线列车运行的控制系统,并不具备对双门的空隙进行探测的能力,因此需加装站台门间隙探测系统,对双门的间隙进行充分探测,在确保间隙内无异常情况后,列车方可安全发车。
1 站台门间隙探测系统概述
1.1 站台门间隙探测系统主要功能
在有人驾驶模式下,列车在站台完成乘客乘降作业后,由车载信号系统控制双门关闭。经人工确认双门关闭且双门的间隙内无夹人夹物后,司机将列车驶离车站。但是,由人工确认双门间隙的过程存在视觉盲区,国内的城市轨道交通线路中曾发生过因列车车门或站台门衔夹异物造成发车剐蹭事故,以及列车车门或站台门夹人未被及时发现而造成严重的乘客伤亡事故。
新一代轨道交通采用FAO模式,不再需要人工介入操作,双门间隙内是否有异物衔夹的探测工作也被站台门间隙探测系统取代。因此,采用站台门间隙探测系统对双门间隙进行探测,是确保乘客安全和列车行车安全、实现站车一体化的关键技术措施。
2019年7月27日我国交通运输部公布的《城市轨道交通运营险性事件信息报告与分析管理办法》中,明确将“夹人夹物动车造成客伤”列为城市轨道交通主要的运营险性事件。为了防止此类事件的发生,新建的轨道交通项目须增加站台门间隙探测系统,用以对双门间空隙进行监测,防止双门关闭后因夹人夹物造成客伤。
站台门间隙探测系统常用的方式包括激光探测和雷达探测。这两种探测方式的控制原理类似,本文以激光探测为例予以说明。激光探测方式下,站台门间隙探测系统采用光通路中断报警的监测原理。激光具备良好的方向性,在站台门的头端布置1组激光发射设备,在站台门的尾端布置对应的激光接收设备,通过检测接收端对激光的接收情况来判断光路中间是否有障碍物存在。发射端和接收端都布置数个并列的对射孔,用于探测不同高度的遮挡物。
如图1所示,整个探测光路中没有障碍物存在时,在接收端可以探测到发射端发送的完整激光序列;当有障碍物存在时,接收端将不能探测到发射端发射的完整激光序列,从而可判断出被遮蔽的可能危及行车安全的异物的高度及范围。因此,激光探测方式判断双门间隙内是否存在异常状况的标准是激光接收端是否检测到激光信号,即:接受到激光回射时视为间隙内无障碍物;无激光回射时,认为双门间隙“异常”,间隙内存在障碍物。

图1 站台门间隙探测系统激光对射原理示意图
雷达探测的原理与激光探测的原理类似。雷达反射波通过电信号驱动继电器以指令方式将探测结果发送给信号系统。
1.2 站台门间隙探测系统与信号系统的接口
站台门间隙探测系统的启动时机为双门关闭后、列车发车前。为此,站台门探测系统应与信号系统有接口,且该接口应独立于双门系统。接口设备可采用国产的安全型继电器,接口设计应符合“故障-安全”原则,接口间采用信号电缆连接,接口信息以继电器状态作为控制及反馈。
信号系统提供2组继电器接点,用以发送“间隙探测系统启动”、“间隙探测系统停止”信息,由站台门间隙探测系统提供驱动电源。站台门间隙探测系统提供2组继电器接点,用以发送“间隙探测系统旁路”、“障碍物检测状态”信息,由信号系统提供驱动电源。
1.3 站台门间隙探测系统的控制方式
站台门间隙探测系统根据工作状态分为主控模式和旁路模式两种。
1.3.1 主控模式
1) 启动探测过程:当信号系统及站台门间隙探测系统的主控模式工作正常时,车载信号系统主机检测到在站列车双门由开启状态转为关闭且锁紧状态后,通过车地无线传输系统向轨旁联锁系统发送启动探测命令;轨旁联锁系统通过继电器信息向站台门间隙探测系统传递启动探测命令。
2) 探测结果为“无障碍物”:站台门间隙探测系统持续探测并实时向轨旁联锁系统反馈探测结果;联锁系统通过继电器信息采集得到探测结果为“无障碍物”后,向车载信号系统转发该结果;车载信号系统判定列车具备发车条件后,允许列车起动离站。
3) 探测结果为“异常”:若站台门间隙探测系统探测到双门间存在障碍物时,则持续向轨旁联锁系统反馈障碍物信息;轨旁联锁系统向车载信号系统转发障碍物信息;车载信号系统命令列车在站停车。
1.3.2 旁路模式
在站台门间隙探测系统发生设备故障、探测不灵敏、与信号系统接口失灵等情况下,应选用旁路模式,以实现互锁解除。其具体操作为:站台门间隙探测系统通过人工操作旁路开关(经过授权的人员在车站内进行操作),向信号系统发送站台门间隙探测系统处于“旁路”状态的信息,用以解除站台门间隙探测系统与信号系统的互锁关系。信号系统将采集到的“旁路”状态作为列车是否具备发车的条件,此时由人工确认站台门间隙内是否有障碍物。
1.3.3 异常场景
1) 再次打开/关闭命令:若已关闭的列车车门或站台门再次打开且信号系统已发送探测启动命令,则车载信号系统发送探测停止命令,终止本次探测。直至双门恢复“关闭且锁紧”状态后,车载信号系统再次发送探测启动命令。
2) 系统反馈超时:若站台门间隙探测系统启动探测后,超过规定时间(如5 s)仍未向车载信号系统反馈探测结果,则信号系统按照“故障-安全”原则,禁止在站列车发车,并在行车监控界面ATS上向工作人员发出“探测到异物禁止发车,需人工现场确认”的提示信息。
2 站台门间隙探测系统与信号系统控制时序分析
站台门间隙探测系统正常工作时与信号系统间的控制时序如图2所示。其具体的控制逻辑如下:①地面联锁信号系统收到双门均关闭的信息;②地面联锁信号系统向站台门间隙探测系统发送启动探测命令,此时继电器动作耗时T1(百毫秒级);③站台门间隙探测系统接到启动探测命令后开启激光探测装置,经T2(百毫秒级)后进入探测状态;④经过探测判断确认无障碍物后,励磁反馈继电器耗时T3(2~5 s),将探测结果发送给信号系统;⑤车载信号系统采集到探测结果为“无障碍物”后,对持续稳定高电平进行确认,延时T4(3 s左右),待具备其他发车条件后列车起动;⑥车载信号系统确认列车零速信号消失后,命令列车起动并向站台门间隙探测系统发出停止探测指令,此时探测尚未停止;站台门间隙探测系统接收到停止探测命令后,延时T5(1~2 s),探测停止。至此,一个完整的双门间隙探测流程完成。
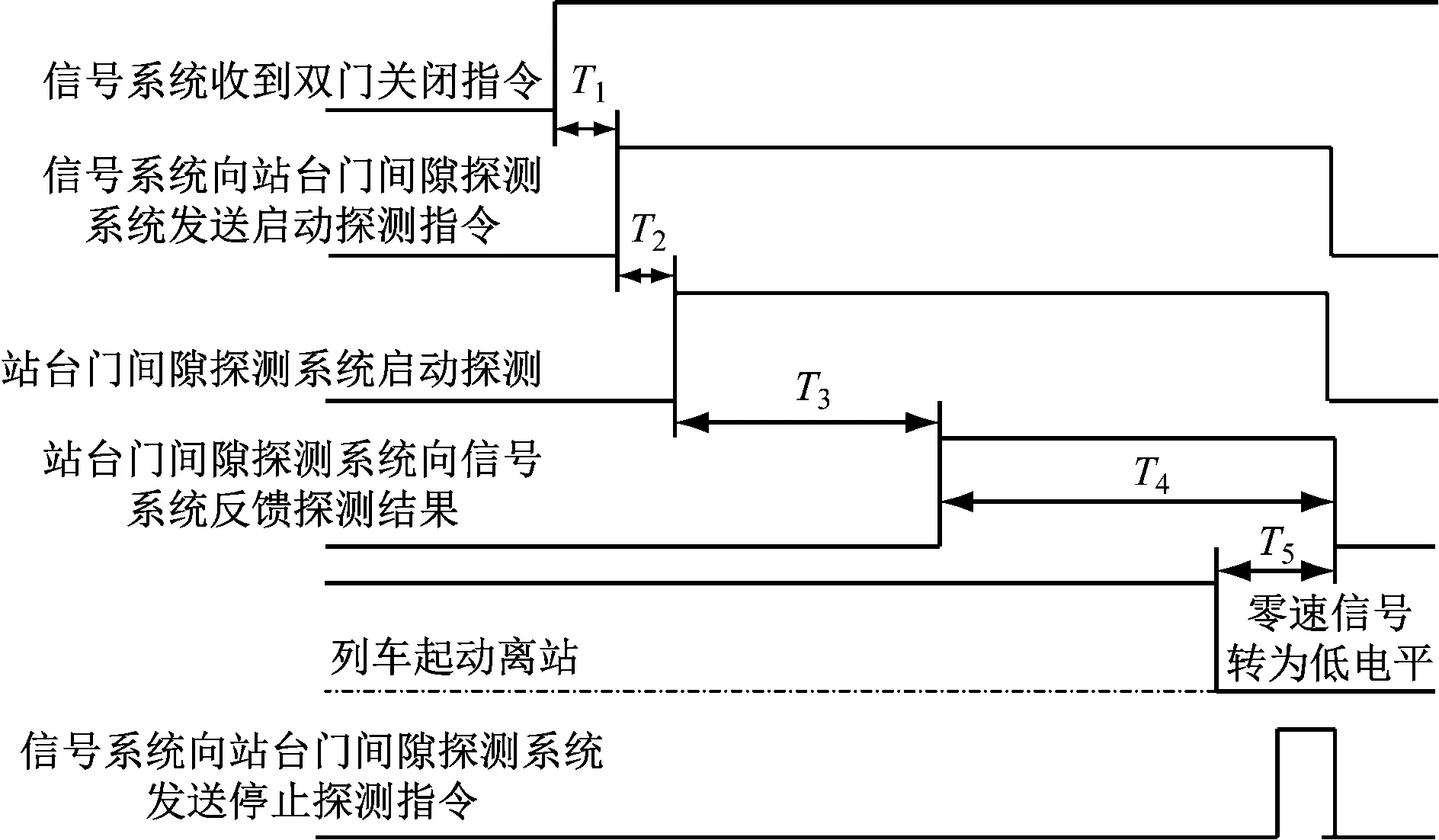
图2 站台门间隙探测系统与信号系统间的控制时序示意图
3 站台门间隙探测系统信号控制逻辑方案对比分析
3.1 接口设计方案分析
站台门与列车车门间并无直接的接口。如果将站台门间隙探测系统完全交给站台门进行探测管理,而站台门并不掌握列车的车门状态,将无法确定站台门间隙探测系统探测的开启和关闭时机,由此存在列车车门状态未知而造成探测不充分的问题。因此,信号系统作为双门“联络”和“统筹”的中间设备,由其对站台门间隙探测系统进行管理,是较为合理的选择。
3.2 探测停止的时机分析
站台门间隙探测系统停止探测的时机,可以有两种选择:
1) 将列车起动(非零速)作为发出停止探测指令的时机。此时,双门关闭后的间隙探测已经完整、充分,双门不会再次开启,因而不存在人/物闯入双门间隙的可能性,列车可以安全发车。图2的探测流程采用了此方式。
2) 将列车全列离开站台区域作为发出停止探测指令的时机。若采用此时机停止探测,将增加探测的时间。当信号系统与站台门间隙探测系统接口中断、信号系统无法向站台门间隙探测系统发送停止探测命令时,可利用此方式作为发出停止探测命令的补充方法。此方式应当充分考虑列车运行时因车体摆动误触发探测告警的可能,避免因此发生列车紧急停车、影响发车效率的情况。
3.3 站台门间隙探测系统对发车效率的影响
有人驾驶模式下,从司机关门开始到司机完成发车前确认(确认双门间隙无障碍物),再到列车起动,整个流程约需20 s,较熟练的司机可以将时间压缩至17 s左右。增设站台门间隙探测系统后,列车发车流程总耗时不应超出原有的作业时间,FAO模式下的探测时间应进一步压缩。障碍物探测应与发车作业环节同步实施,不可因探测作业增加列车停站耗时。为此,需进一步研究站台门间隙探测系统探测障碍物的优化措施。
3.4 旁路状态及列车发车确认
站台门间隙探测系统是独立于信号系统之外的光机电结合的监测新技术,其设备为新设备,探测系统的稳定性、可靠性是制约列车发车、影响运营效率的关键因素。因此,有必要设置相关的旁路环节,以实现互锁解除,确保列车顺利发车。
站台门间隙探测系统旁路指令是指车站工作人员确认双门间无障碍物后向信号系统发布的旁开监测系统的指令信息。特别是FAO线路中没有司机瞭望环节,在站台门间隙探测系统发布探测结果为“异常”时,必须增加人工确认环节,由车站工作人员现场确认双门间隙内无障碍物后,方可使用互锁解除,切不可未经人工确认擅自将探测系统调整到旁路模式并命令列车发车。
站台门间隙探测系统旁路与站台门互锁解除之间的关系要明确。站台门可能会发生故障卡滞、无法关闭的情况,为了保证运营安全,需要人工对站台门进行互锁解除。实施站台门互锁解除,相当于向信号系统反馈了站台门的锁闭指令,此时应继续触发站台门间隙探测指令,在确认双门间隙内无障碍物后再命令列车发车。
4 站台门间隙探测系统的应用场景及发展方向
站台门间隙探测系统是保证行车安全、乘客安全、列车安全的关键环节,也是FAO模式下替代人工操作的补强环节。该系统的投用将增加城市轨道交通线路运营安全的防护水平,提高探测双门间隙内安全风险的技防能力。
在站台门间隙探测系统的使用过程中,需要结合实际运营情况对系统的可靠性与稳定性进行评估。特别是配备了站台门间隙探测系统的新建城市轨道交通工程,在新线开通初期,由于探测系统设备的稳定性尚需磨合,且系统易受到隧洞间粉尘等外界因素的影响,可能会出现系统误判的情况,进而造成发车晚点,运营指标值明显下滑。为此,建议仔细评估站台门间隙探测系统的投运方式与安全行车效能间直接的制约关系。
现有站台门间隙探测系统的主要功能为对双门间隙夹人夹物情况进行探测。由于其探测范围具有局限性,该探测系统并不能对全车、运营全过程进行异物侵限检查,因此不可将其定位为障碍物全息感知系统,可将该探测系统视为FAO模式下局部范围的功能补强。
采用FAO后,可进一步提升城市轨道交通系统的智能化水平,实现无人干预的自主感知驾驶。下一代的城市轨道交通列车将配备毫米波雷达、无线及红外等先进的探测技术及设备,有望在参考无人驾驶汽车技术基础上实现城市轨道交通列车全车的主动感知。因此,FAO线路不应局限于现有的站台门间隙探测和站台区域的异物探测等安全保障措施,而应放眼于列车运行全过程的自主安全感知,以主动实现列车在停站、乘降及运行等作业环节全过程的安全。
