空气悬架客车横向动力学建模和稳定性分析*
2022-12-08孙晓强蔡英凤PakKinWong吴子强
陈 龙,陈 明,孙晓强,蔡英凤,Pak Kin Wong,吴子强
(1.江苏大学汽车工程研究院,镇江 212013;2.澳门大学机电工程系,澳门 999078;3.扬州市奥特瑞汽车电子科技有限公司,扬州 225299)
前言
客车由于质量大、质心高、轮距窄等特点,其在高速紧急避撞(高速大转角)和湿滑路面转向等特殊行驶工况下极易产生横向失稳现象[1]。该现象若不能实现准确揭示和预判,最终将会导致客车发生侧翻事故。悬架是研究客车横向运动必须考虑的关键因素之一[2]。随着客车技术的快速发展,装备空气悬架已成为主流趋势。相较于传统悬架,空气悬架能够显著提升客车综合性能,但空气悬架客车的横向运动演化过程与传统悬架客车存在明显差异,系统非线性特征更为明显,横向稳定性分析难度更大、挑战更高[3]。
构建能够准确反映空气悬架客车横向动力学演化规律的数学模型,是后续进行系统稳定性分析的基础。Gauchia等[4]建立了一种用于估计客车侧翻运动过程中横向加速度阈值的数学模型。Altork等[5]为实现客车横向稳定性控制,建立了考虑横摆、侧倾和横向运动的客车3自由度动力学模型。付翔等[6]以四轮转向2自由度模型为基础提高了四轮转向车辆在低附路面的稳定性。王睿等[7]建立了基于横向载荷转移率的客车7自由度动力学模型,分析了结构参数及车速对客车侧翻稳定性的影响。然而,针对客车相关部件在大范围运行工况下的非线性力学行为,现有研究仍缺乏有效的建模方式。
当前,无论是客车还是其他类型车辆,关于横向稳定性分析的内容主要集中在横向失稳指标确定。Brennan等[8]提出基于零力矩点的汽车横向失稳指标。Zhang等[9]基于相平面法研究了车辆侧翻稳定性,提出了基于载荷转移比等高线的车辆侧翻指标。黄明亮等[10]采用能量法来研究汽车侧翻稳定性,提出了新的汽车侧翻能量稳定指标。叶慧等[11]通过对质心侧偏角的估计和传感器获得横摆角速度的方法,利用一种非光滑控制技术提升了车辆的横向稳定性。然而,由于特殊行驶工况下的客车横向运动过程较为复杂,系统非线性特征明显,因此单一失稳指标因缺乏对车辆全局动态的综合考虑,往往无法准确全面地评估客车实际侧翻过程。
针对以上问题,本文在考虑空气弹簧及轮胎非线性力学特性的基础上,首先建立空气悬架客车3自由度非线性横向动力学模型,进而运用非线性系统稳定性分析理论,对空气悬架客车在高速转向等特殊行驶工况下的横向稳定性进行鞍结分岔分析,获取空气悬架客车的横向动力学失稳演化规律,最后通过整车动力学仿真对稳定性分析结果进行验证。相关研究能够为提高客车横向行驶安全提供一定依据。
1 客车横向动力学模型
1.1 整车横向动力学模型
结合空气悬架客车的结构特点和系统稳定性分析需求,建立考虑空气弹簧和轮胎非线性力学特性的空气悬架客车3自由度非线性横向动力学模型,主要包括车身横向运动、侧倾运动和横摆运动,模型结构如图1所示。
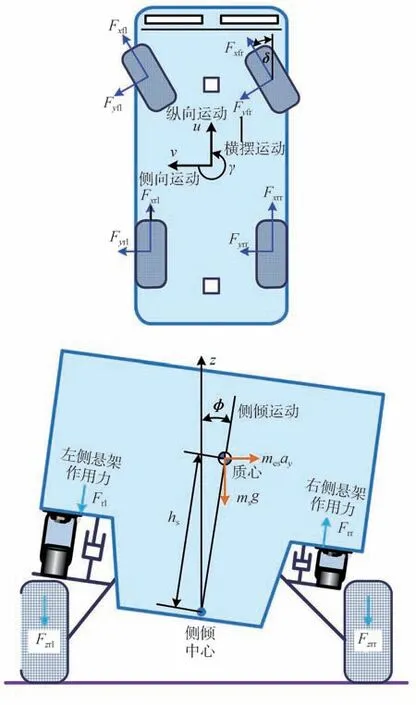
图1 空气悬架客车3自由度横向动力学模型
基于牛顿运动定律,模型具体表达式如下。
(1)横向运动模型

(2)横摆运动模型

(3)侧倾运动模型

式中:m为整车质量;ms为簧上质量;β为车身质心侧偏角;φ为车身侧倾角;γ为车身横摆角;δ为前轮转角;Ix为车身侧倾转动惯量;Iz为车身横摆转动惯量;a、b、d分别为质心到前后轮的距离及轮距;hs为车身侧倾中心高度;Fyi为轮胎侧偏力;Fi为空气悬架对车身的垂向作用力(i=fl,fr,rl,rr)。Fi的表达式为

式中:ki(t)为空气弹簧的时变刚度;ci为空气悬架减振器的阻尼系数;Δs为悬架相对位移。
1.2 空气弹簧非线性模型
作为空气悬架的主要弹性元件,空气弹簧具有典型的非线性刚度特性,且该刚度特性与弹簧被压缩或被拉伸的程度直接相关[12]。本文以膜式空气弹簧为例,对空气弹簧动刚度特性进行分析,可得空气弹簧弹性力的表达式为[13]

式中:F为弹性力;pa为大气压力;p为气囊内气体绝对压力;pe为气囊内气体相对压力;Ae为空气弹簧有效截面积。空气弹簧刚度可通过弹性力直接对空气弹簧垂向位移求导得到:

式中:k为空气弹簧刚度;s为空气弹簧垂向位移。假设空气弹簧气囊内的气体总质量一定,则压力和容积的关系可表示为

式中:V为气囊容积;n为气体多变指数,1≤n≤1.4。式(7)两边分别对s求导,可得:

那么气囊内气体相对压力对s求导可得:

式中负号表示压力变化趋势与体积变化趋势相反,表示刚度时,取其绝对值。
综合上述各式,空气弹簧刚度的表达式为

对于活塞座为圆柱形的膜式空气弹簧,其有效面积在工作行程内的变化可忽略不计[14],则空气弹簧的非线性刚度特性可进一步简化为

1.3 轮胎非线性模型
在车辆动力学分析过程中,大多采用“魔术公式”或Dugoff等经验轮胎模型反映轮胎力的强非线性特征[15-16]。然而,在解析分析过程中,这些轮胎模型形式较为复杂,可能导致解析问题无法求解。因此,为便于理论推导和后续问题解决,同时考虑到高速转向时轮胎侧向力与垂直载荷的非线性关系,本文选用较为简洁的多项式平方轮胎模型[17],其表达式为

式中:i=fl,fr,rl,rr,j=f,r;Fyi为轮胎侧向力;Fzi为轮胎垂向载荷;Ci为轮胎侧偏刚度;Cj1、Cj2为经验常数;αj为轮胎侧偏角;μ为路面附着系数。
前后轮胎侧偏角的表达式为

车辆在横向运动过程中,载荷将发生横向转移,轮胎垂直载荷的变化可表示为

其中
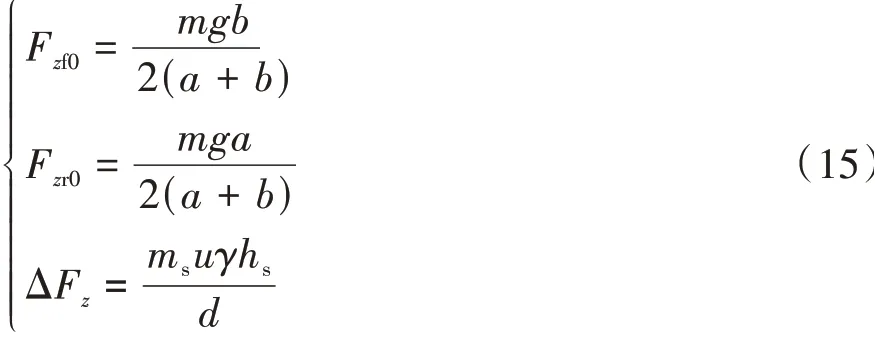
式中:Fzfo和Fzro为前后轮垂向静载荷;ΔFz为表示前后轮的载荷转移量。
2 非线性系统稳定性分析
2.1 非线性微分动力学系统的建立
为构建空气悬架客车横向动力学系统微分形式,将车辆纵向速度、前轮转角和附着系数定义为输入参数ξ,令φ̇=η,(β,γ,φ,η)T表示为(x1,x2,x3,x4)T,则式(1)~式(3)可写成如下非线性动力学系统的微分形式:

式中:X=(x1,x2,x3,x4)T为系统状态变量;ξ=(u,δ,μ)T为系统可变参数。则上式可表示为其中:
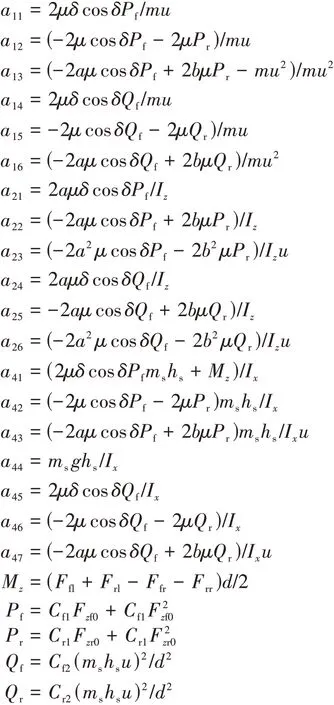

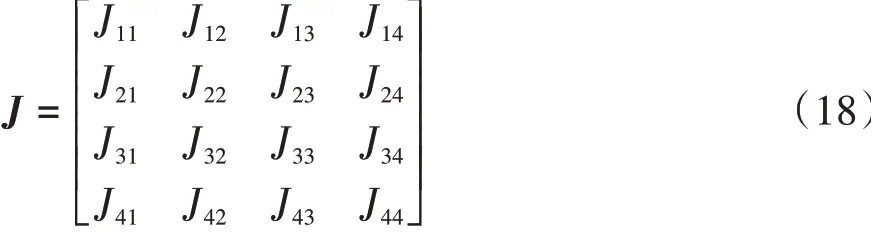
令式(16)等式左端等于零,可求得非线性系统的平衡点,设此平衡点为Xe=(xe1,xe2,xe3,xe4),同时可得到此系统在平衡点处的雅克比矩阵J为
矩阵J的特征方程为

式中:系数ci(i=1,2,3,4)与矩阵J的元素有关,具体数学关系为
根据非线性系统稳定性Hurwitz判据,若以下条件满足:
则特征方程的特征根均具有负实部,非线性系统在平衡点时渐近稳定的;若式(21)不成立且c4≠0,那么特征方程存在正实部特征根,说明系统的平衡点是不稳定的。当c4=0时,特征方程具有含零实部的特征根,此时平衡点邻域处于一种临界状态,具有非常复杂的非线性动力学行为。此时平衡点附近的线性化系统不一定和原系统拓扑等价,因此,需要对系统进行降维,通过降维后的约化系统分析原系统在平衡点的非线性动力学行为[18]。
2.2 基于中心流形理论的系统降维
对于存在各种非线性因素的复杂高维动力学系统,通过降维进行分岔分析可为其控制设计提供理论依据。基于中心流形理论的降维方法基本思想是:假设在平衡点附近的系统存在有限维中心子空间,根据中心流形定理,可将方程向中心子空间投影,从而达到降维目的[19]。
设路面附着系数μ和车速u为定值,随着前轮转角δ的增加,车辆转向时一定会出现奇异点(X*,δ*),也即式(19)一定会出现c4=0的情形。将奇异点坐标变换转移到原点,令:

则系统可转换为奇异点在(0,0)处的微分方程:

在此奇异点(0,0)处,稳定性条件式Δ4=0,则式(22)存在1个零特征根和3个实部为负数的特征λ1、λ2和λ3。构造一个矩阵M,其列为A的零特征根和负实部特征根对应的特征向量。取T=M-1,则有:

则式(23)可变换为

式中:Y为变换后的状态变量;Λ为由A的特征值组成的对角矩阵。将变量分为临界状态Yc和稳定状态Ys,其中Yc=y1,Ys=(y2,y3,y4)T,则式(26)可分解为

式中Λc=0,Λs=diag(λ1,λ2,λ3)。
对于式(27),由中心流形定理有,当Λc的所有特征值为零,Λs所有特征值实部为负,那么存在一个可微函数H,使得Ys=H(Yc),且其为式(26)的中心流形,具体函数关系可表示为

其边界条件为
在此基础上,中心流形方程为
设hi(y1,δ),则可展开为如下形式。

将式(31)代入式(26),通过对比可求得ki1、ki2、ki3(i=2,3,4)的具体数值和中心流形,再将其代入式(27)的第1式可得中心流形上的约化系统。将车辆参数,如表1所示,进一步代入系统,求其约化系统具体表达式为
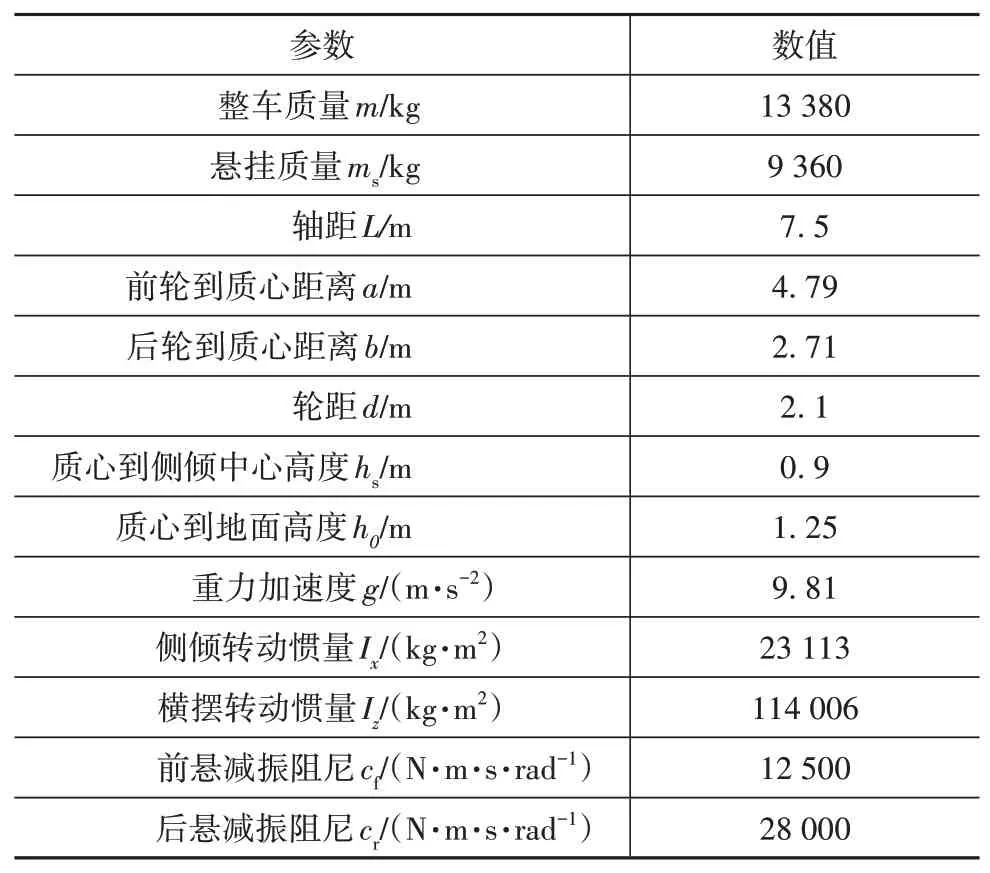
表1 整车主要参数

定理1:在确定系统中心流形条件下,如果降阶系统的原点是渐进稳定的(或非稳定的)则整个系统的原点也是渐进稳定的(或非稳定的)[19]。
式(32)就是式(26)在奇异点附近的约化系统,由定理1可知其与原方程相比,定性性态是等价的,因此,求原方程的定性性态只需对约化后的系统进行定性性态分析。
2.3 系统鞍结分岔判定
对于一维含参数的非线性动力学系统

式中:x为状态变量;θ为分岔参数。当θ<0时,系统无平衡点;当θ>0时,系统有两个平衡点,x1=θ1∕2,x2=-θ1∕2。平衡点x1=θ1∕2的雅克比矩阵Dxf(x1,θ)=-2θ1∕2<0,则x1称为稳定平衡点或结点,平衡点x2=-θ1∕2的雅克比矩阵Dxf(x2,θ)=2θ1∕2>0,x2称为不稳定平衡点或鞍点。所以x=0,θ=0为系统的分岔点,此分岔现象也叫鞍结分岔。非线性系统(33)在分岔点(0,0)有:
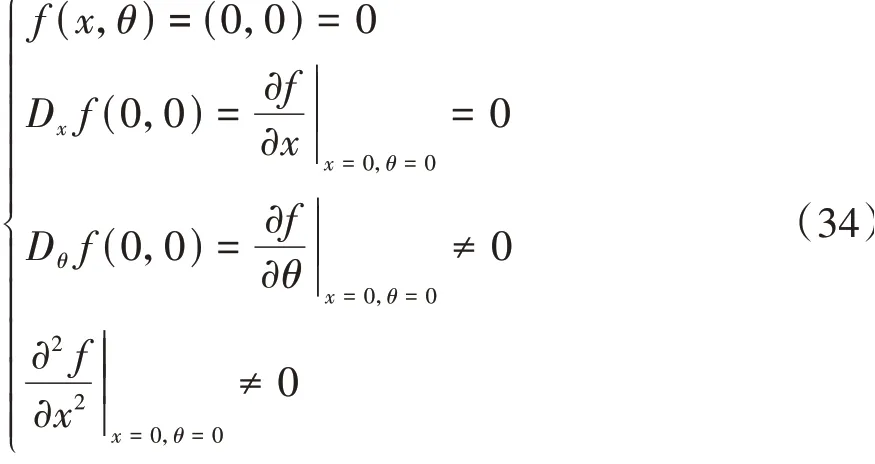
按此思路可以推出一维含参数的非线性动力学系统发生鞍结分岔的充分必要条件为[20]
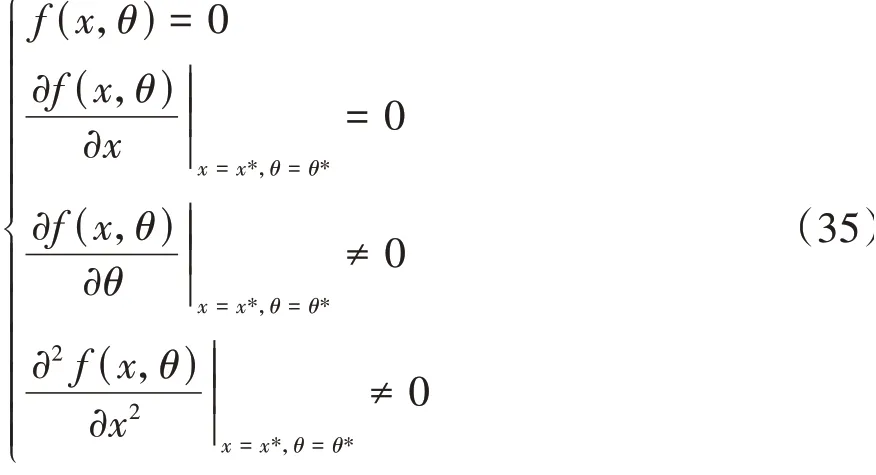
那么对基于中心流形定理降维后的约化系统式(32)进行分析可得:
因此,式(16)满足鞍结分岔的充分必要条件,系统将会发生鞍结分岔。
2.4 平衡点分岔行为分析
考虑到计算繁杂以及篇幅有限,本文仅以典型客车(表1)为对象进行分析,根据车辆实际运行状态,设计4种工况进行系统稳定性分析,即掌握空气悬架客车的横向稳定性演化规律。工况1和工况2设置附着系数μ=0.8的高附路面,车速分别为72和108 km∕h,工况3和工况4设置附着系数μ=0.3的低附路面,车速分别为50和80 km∕h。通过分析计算,得到4种工况下车辆横向稳定性鞍-结分岔相平面图,如图2~图5所示,其描述了系统从初始状态到失稳的变化过程。
图2~图5中结点为稳定平衡点,鞍点为不稳定平衡点。结点附近区域的相轨迹会收敛至稳定的平衡点,因此该区域为稳定区域,鞍点附近区域的相轨迹是发散的,表示为不稳定区域。
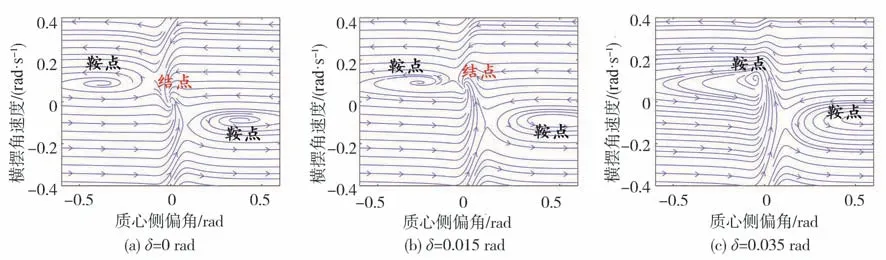
图5 工况4相平面图
由图2和图3可见:图(a)中前轮转角等于0时,稳定平衡点与原点是重合的,表明初始值位于稳定区域时,车辆收敛于直线运动;图(b)中当前轮转角分别增大到0.05和0.025 rad时,稳定的平衡点逐渐靠向一个不稳定的平衡点,稳定区域也因此逐渐减小;图(c)中前轮转角分别增大到0.098和0.052 rad时,两平衡点无限接近,若转角继续增大,稳定平衡点将消失,系统只剩两个不稳定的平衡点,此时系统稳定区域消失,处于任意初始值的车辆都将失稳。相较而言,速度更高的工况,系统趋向失稳的前轮转角阈值较小。
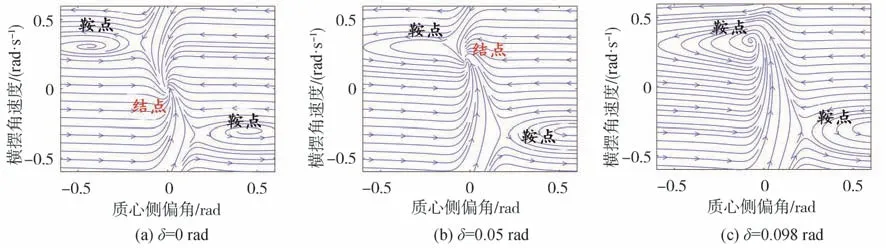
图2 工况1相平面图

图3 工况2相平面图
由图4和图5可见:图(a)中前轮转角等于0时,稳定平衡点与原点是重合的,表明初始值位于稳定区域时,车辆收敛于直线运动;图(b)中,当前轮转角分别增大到0.03、0.015 rad时,稳定的平衡点逐渐靠向一个不稳定的平衡点,稳定区域逐渐减小;图(c)中,前轮转角分别增大到0.059、0.035 rad时,两平衡点无限接近,若转角继续增大,稳定平衡点将消失,系统只剩两个不稳定的平衡点,此时系统稳定区域消失,任意初始值条件下车辆都将失稳。通过比较后两图和前两图,可以发现,低附路面下,系统趋向失稳的前轮转角阈值较小。该结论也符合实际现象和理论逻辑。
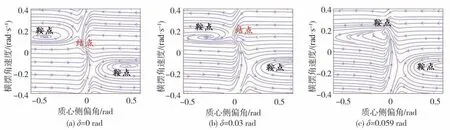
图4 工况3相平面图
3 稳定性分析结果仿真验证
为验证前述基于解析法的系统稳定性分析结果的可靠性,进一步开展整车动力学模型仿真。选取转向盘角阶跃输入工况作为试验工况,利用Matlab∕Simulink仿真平台建立包括轮胎模型、空气悬架模型的整车动力学模型,设置Simulink Parameters和终止时间,采用算法类型为变步长,算法为ode45的求解器对模型进行仿真。以横向载荷转移率(LTR)和横向加速度为指标,分析系统稳定性。一般认为横向载荷转移率达到1.0,横向加速度达到0.5g时,车辆将极易发生侧翻,即系统失稳。为节约篇幅,这里仅选取高附路面车速为72 km∕h的工况1和低附路面车速为50 km∕h的工况3,进行分岔分析结果的仿真验证。两种工况下的客车横向载荷转移率(LTR)和横向加速度仿真结果如图6和图7所示。
由图6和图7可见,当工况1前轮转角达到0.096 rad,工况3前轮转角达到0.057 rad,车辆的横向载荷转移率已达到1.0,而横向加速度也超过0.5g,说明车辆处于临界失稳状态。此外在工况2和工况4的仿真结果中当临界转角分别为0.053和0.034 rad时车辆也同样处于临界失稳状态,此时若受到微小干扰将极易发生侧翻。考虑到轮胎模型的精度、模型迭算以及系统工作于强非线性区域,仿真结果与解析结果相比虽有些许不同(表2),但误差较小能够接受,可认为仿真分析结果与解析分析结果一致,证明本文提出的非线性稳定性分析方法的有效可行。
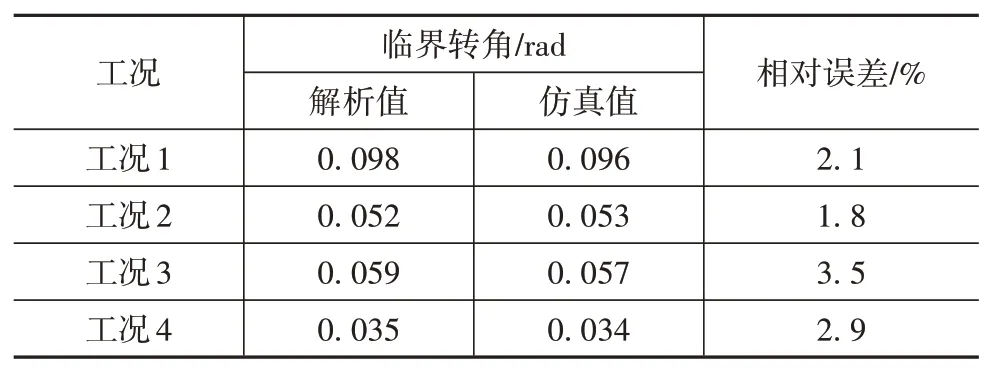
表2 临界转角值对比
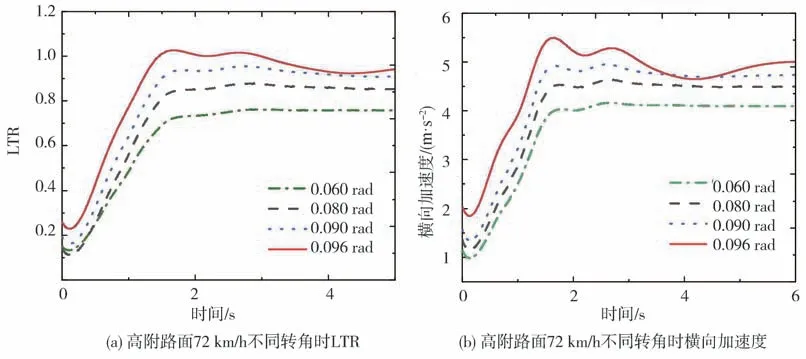
图6 工况1 LTR和横向加速度仿真结果
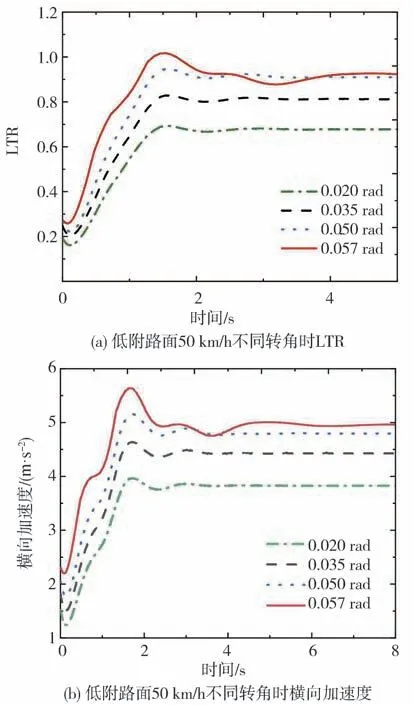
图7 工况3 LTR和横向加速度仿真结果
4 结论
本文中提出了一种系统非线性动力学建模方法,考虑了空气弹簧和轮胎的非线性动力学特性。对高维复杂的系统降维得到了等价的约化系统,判断出系统将会发生鞍结分岔。应用非线性动力学系统,通过对4种不同工况下系统在平衡点的分岔行为进行相平面分析,得到在不同路面条件下空气悬架客车随车速和前轮转角变化的横向动力学失稳规律。
基于整车动力学仿真对稳定性分析结果进行验证,结果表明本研究能为提高客车横向行驶安全和稳定性控制系统的设计提供依据。针对其他影响车辆稳定性的因素如整车结构参数的变化、更加复杂的路面条件等进行展开分析,采用更加精确的稳定性评价指标和多样性的仿真工况将是后续研究的重点。
