低虚警率的红外弱小目标检测算法*
2022-12-07陈紫强
陈紫强,梁 晨
(桂林电子科技大学a.信息与通信工程系;b.认知无线电与信息处理教育部重点实验室,广西 桂林541004)
0 引 言
在尽可能远的距离依然可以有效检测与跟踪目标,是红外小目标自动检测与跟踪技术的研究意义。然而远距离成像时,目标表现为信噪比较低的点状小目标,没有明显的纹理、大小、形状等特征,容易淹没在背景杂波中,给目标的检测带来了很大的困难[1]。
为了有效检测低信噪比条件下的红外小目标,国内外众多学者进行了广泛而深入的研究。近年来,基于人类视觉机制(Human Visual System,HVS)的目标检测算法由于具备良好的检测性能引起了学者们的广泛关注。文献[2]提出局部对比度算法(Local Contrast Measure,LCM),通过目标局部区域的最大像素值与周围局部背景块的最大均值之间的比值来增强目标与背景之间的对比度,但是该算法容易受到高亮点噪声的影响。针对这一问题,文献[3]提出了局部差异对比度算法(Difference-Based Local Contrast Method,DBLCM),使用目标局部区域的均值与背景区域的最大均值来增强目标,以及利用抑制因子来消除高亮点噪声干扰。针对传统LCM算法计算耗时高的问题,文献[4]提出了双层局部对比度机制算法(Double-layer Local Contrast Measure,DLCM)。该算法通过双层对角灰度差对比度机制,增强目标的同时也能很好地抑制背景杂波,并且通过单尺度窗口进行图像遍历,计算量大大降低。然而,这些基于空间滤波的单帧检测算法往往检测能力有限,因为忽略了多帧序列中目标的时间相关性,很难完全消除虚警。
文献[5]提出了一种时空局部对比度滤波算子(Spatial-Temporal Local Contrast Filter,STLCF),采用空域局部对比度和时域局部对比度算子同时来增强目标与局部背景之间的差异,但该算法在远距离场景下的检测性能有限。文献[6]提出了时空域联合预测模型(Spatial-Temporal Local Contrast Map,STLCM),在空间域利用均值滤波来预测背景,同时结合时域的局部对比度差异信息进行小目标的检测。该算法能够很好地抑制高亮背景,但易受到高亮点噪声的干扰,导致虚警率高。文献[7]提出了时空局部差分算法(Spatial-Temporal Local Difference Measure,STLDM),通过构造一个三维的时-空域滑动窗口,在时域和空域同时进行目标局部对比度的计算,使得检测结果得到了很大的提高,但是该算法在远距离场景下易受到高亮度背景物体以及背景边缘的干扰。
针对远距离场景下目标信噪比低的情况,本文提出了一种时空域相融合的红外弱小目标检测算法。实验结果证明,在远距离复杂场景下,该算法能够很好地降低虚警,同时保持较高的检测率。
1 时空域融合的检测算法
时空域融合检测算法主要包括空域相对局部对比度算法(Relative Local Contrast Measure,RLCM)、时域局部差分算法(Temporal Local Difference Algorithm,TLCD)、时空域融合的局部显著检测图(Spatial-Temporal Relative Local Contrast Difference,STRLCD),自适应阈值分割。本文的目标检测算法框图如图1所示。
1.1 局部对比度计算
基于人类视觉对比度机制(Human Visual System,HVS)相关的最经典的算法就是LCM[2],后续的很多算法都是在LCM算法上的延伸,本文采用的RLCM[8]算法就是在LCM算法的基础上进行的改进。
LCM提出使用一个滑动窗口在图像上从左至右、从上至下逐像素滑动,如图2所示。每个窗口被划分成9个子窗口,如图3所示。中间区域0是目标可能出现的区域,在它周围的区域1~8代表局部背景块。
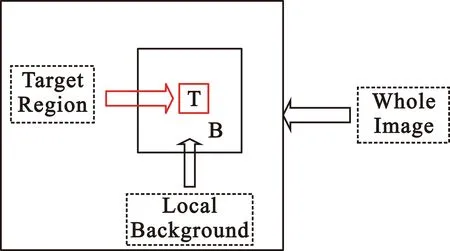
图2 目标区域与局部背景区域的定义

图3 LCM算法滑动窗口
LCM算法计算目标局部对比度的公式可表示为
(1)
式中:L0为中心目标区域块的最大值;mi为周围第i个局部背景块的灰度均值。
LCM算法通过式(1)的比值运算可以很好地增强目标,但是很容易对高亮度背景物体以及噪声点也进行增强,使得虚警目标增多。
针对这种情况,本文采用RLCM算法来进行空域局部对比度的计算。RLCM算法不仅采用了比值运算来进行目标的增强,而且还采用差值运算来进一步抑制高亮背景,因此相较于其他算法,具有更好的鲁棒性;同时该算法结构简单,只采用局部背景块和中心区域块中的k个参数进行计算,相比于传统LCM算法,检测速度得到大大提高。RLCM算法的滑动窗口如图4所示。由于远距离背景下红外目标多呈现点状,目标尺寸通常不大于3×3,本实验所选取的局部子块窗口尺寸大小为3×3。

图4 RLCM算法的滑动窗口
中心窗口的像素点的RLCM定义如公式(2)~(5)所示:
(2)
(3)
(4)
(5)

1.2 时域局部差分计算
传统的红外小目标检测算法大多都是基于空域滤波的单帧检测方法,此类算法由于忽略了多帧序列中运动目标的时空相关性,在复杂场景下的检测能力有限,会造成大量虚警。
对于目标而言,在不同帧图像中所处的位置不同,相应的灰度强度也会发生一定的变化[7]。然而,对于图像中的高亮点噪声大多都是随机产生的,在图像中所处位置相对固定,灰度值也不会发生变换。由此,采用时域局部差分算法,利用目标中心区域在时空域的灰度强度变化,进一步提高目标检测率,抑制虚警目标。时域局部差分的计算公式如式(6)~(9)所示:
Imax=max{MTfn-t,MTfn,MTfn+t},
(6)
Imin=min{MTfn-t,MTfn,MTfn+t},
(7)
TLCD(i,j)=(Imax-Imin)2,
(8)
(9)
式中:MTfn、MTfn-t分别代表当前第n帧以及第n-t帧的中心目标区域块(3×3)的最大灰度值,t为间隔的帧数。序列图像间隔帧t的选取会影响一定的检测结果,本文采用t=3。
1.3 时空域融合
对于空域RLCM算法,采用式(2)中的比值运算和差分运算可以增强目标以及抑制高亮度背景的干扰,但是当图像中存在高亮度固定噪声点时,此种算法也会增强噪点,使得检测结果中存在大量虚警。
对于时域局部差分TLCD算法,利用了目标的时域运动特征,可以检测出运动的目标,消除固定噪点的干扰。由于在图像序列中背景也存在相对运动,所以当红外图像中背景物的亮度明显大于目标时,TLCD算法很难抑制高亮背景物的干扰。
因此,为了提高检测率,并且更好地降低虚警率,将空域滤波结果和时域滤波结果进行乘积融合,如式(10)所示:
STRLCM(i,j,n)=RLCM(i,j,n)×TLCD(i,j,n) 。
(10)
STRLCM定义为时空域相融合的局部显著检测图。对于单独的空域RLCM检测算法和时域TLCD检测算法,都可以大致检测出目标位置,但在复杂场景下,目标容易淹没在大量虚警下。空域和时域检测算法都会产生虚警,但产生虚警的位置不相同,而目标位置相同。因此通过乘积融合,使得目标得以保留同时增强,背景物以及噪声得到极大抑制,从而虚警率大大降低。
1.4 自适应阈值分割
融合RLCM和TLCD的滤波结果得到的显著检测图STRLCM中,目标得到增强,高亮背景物、背景边缘以及高亮噪声点等干扰目标都得到了抑制。当STRLCM的值越大时,说明此处为真实目标的概率越大。
通过对局部显著检测图进行自适应阈值分割[4],即可提取出真实的红外小目标。本文中阈值分割的表达式为
TH=μSTRLCM+kσSTRLCM。
(11)
式中:μSTRLCM和σSTRLCM分别代表时空域相结合检测图STRLCM的均值和标准差;k值为分割系数,k值的选取需要根据实际场景而定。本文通过对所采用的数据集进行验证,选取k为[20,45]之间。经过TH阈值分割后即可得到最终的检测结果。
2 实验结果与分析
2.1 算法的参数确定
本文数据集中的目标尺寸较小,在256×256的图片像素中只占到不到2×2的像素范围,因此,局部块的滤波窗口采用3×3的大小即可。空域RLCM算法中K1和K2的参数根据虚警率进行选取,K1和K2选取过大会影响计算效率,因此选取过小不能很好地抑制噪点。因此,选取K1=2、K2=4作为参数的应用,便可以有效地检测到目标。
对于时域TLCD算法中帧数t的选取,t选取过小,目标的位置发生变化不大,目标灰度值的变化不够明显,检测效果不好;t选取过大,容易造成高亮度噪点的误检。因此,本实验采用t=3作为参数。
对于自适应阈值中分割系数K值的选取,根据虚警率进行选取,选取的K值参数要使虚警率尽可能小,由于不同场景下阈值的选取不是固定的,因此选取了[20,45]这个适应的范围进行目标的检测。
2.2 本文算法验证
为了验证本文算法的有效性,引用文献[9]中的远距离红外真实场景进行红外目标检测的实验,采用数据集中的data6、data8、data18、data19四组不同的远距离场景下的图像序列。表1给出了四组图像序列的详细信息。本文所有试验均在一台采用2.2 GHz英特尔酷睿i7-10700F处理器、内存(RAM)为8 GB的台式电脑上运行,所使用的测试软件为Pycharm2019。

表1 四组图像序列的详细信息
图5展示了本文算法对data6图像序列中取某帧图片的滤波结果,分别显示空域RLCM滤波结果、时域TLCD滤波结果,以及STRLCM的滤波结果。图5中红色框代表了目标所在的位置。

图5 时空域融合STRLCM滤波结果三维图
对于图5(a)中data6序列图像选取的这帧图片可以看出,目标信噪比极低,并且淹没在高亮度地面背景边缘中。从图5(b)的空域RLCM滤波结果可以看出,虽然检测出了目标的位置,但目标周围存在大量虚警,甚至虚警的RLCM检测值大于目标的检测值。从图5(c)时域TLCD滤波的检测结果可以看出,目标位置的检测结果值小于虚警的检测结果值,使得容易造成误检现象。图5(d)对应的本文算法的结果显示,虚警得到很好抑制,并且目标得到增强。上述结果可以解释为:单独的空域和时域处理产生的目标位置相同,虚警位置不同,通过时空域融合处理,目标位置信息得到保留,虚警被相互抵消,使得虚警率较大程度地降低。
2.3 算法性能分析
为了评价本文算法的性能,将本文算法与STLCF算法[5]、STLCM算法[6]、STLDM算法[7]进行性能比较。图6给出了各个算法的检测结果图。输入图片来自于表1中四组红外图像序列所选取的某帧红外原图,本文算法的阈值选取为25,每个算法的间隔帧数t都选取为3。图6中黑色框代表了检测到的目标。
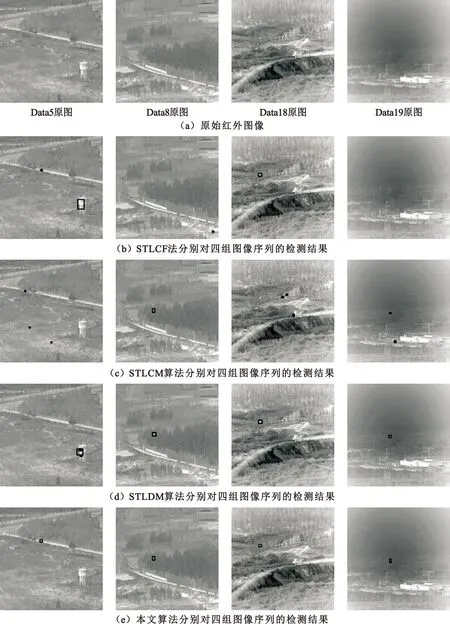
图6 各个算法检测结果图
由图6可以看出,相比较其他算法,STLDM算法和本文算法可以很好地检测出data8、data18、data19图像序列中的小目标,而 data6图像序列的这帧图片只有本文算法正确检测到了目标,并且没有虚警目标,说明本文算法对高亮度背景干扰物以及高亮点噪声的抑制效果很好。
为了衡量相关算法的检测性能,本文采用信杂比增益(Signal Clutter Ratio Gain,SCRG)和背景抑制因子(Background Suppress Factor,BSF)[10],以及检测率(Pd)、虚警率(Pf)[3]作为评价指标,对各个算法进行比较。通过比较各个算法的SCRG值、BSF值以及检测率和虚警率值,可以有效判断算法对真实目标的检测性能。对于SCRG值和BSF值分表代表对目标的增强能力以及对背景的抑制能力,两者的值越大,说明目标越容易被检测到,算法的性能越好。而针对Pd值和Pf值,Pd值越大,Pf值越小,代表对应算法的检测结果越好。各个指标定义如公式(12)~(16)所示:
(12)
(13)
(14)

(15)

(16)
式(12)中:GT为目标区域的最大灰度值;Gb为目标周围局部背景区域的平均灰度值;σb为目标周围局部背景区域的标准差。目标区域取3×3尺寸大小,局部背景区域取7×7尺寸大小。式(14)中,σin和σout分别表示原始图像和检测结果图STRLCM的标准差。
表2~5分别展示了各个算法对序列图像的检测性能指标。
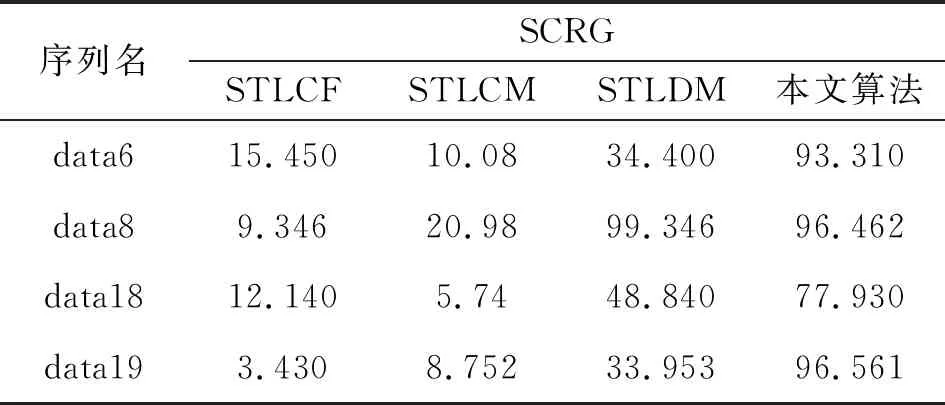
表2 各图像序列下(取其中一帧为例)不同算法的SCRG值
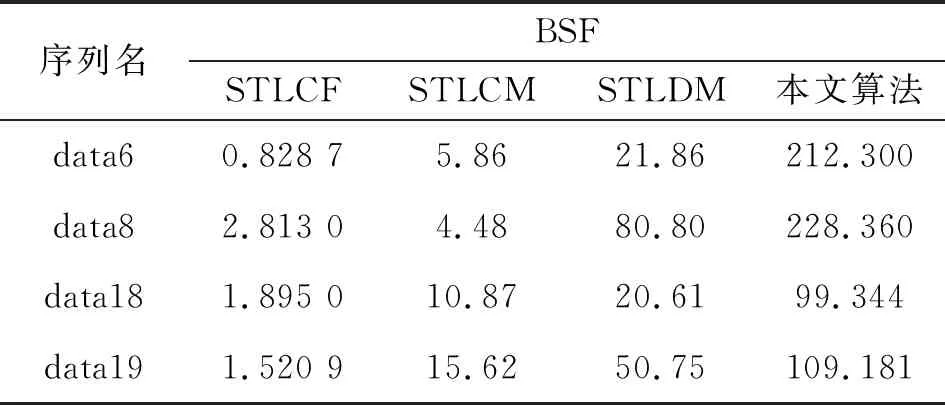
表3 各图像序列(取其中一帧为例)不同算法的BSF值

表4 各图像序列(取其中一帧为例)不同算法的检测率
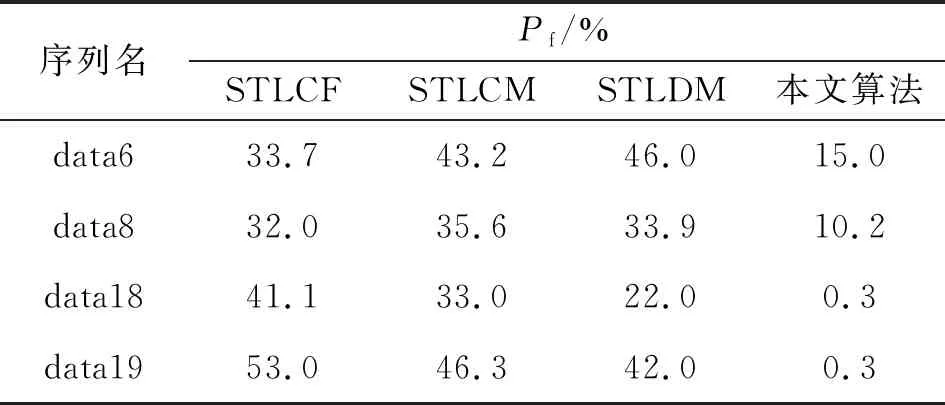
表5 各图像序列(取其中一帧为例)不同算法的虚警率
从表2~3可以看出,data6、data18、data19中本文算法的信噪比增益SCRG值都是最高的,data8中最高值是STLDM算法,但是本文算法和其结果相差不大。本文算法的背景抑制因子BSF值最高。因此,相比较其他算法而言,本文算法不仅能很好地增强目标,同时更好地抑制了高亮背景。
从表4~5可以看出,在data8中,本文算法的检测率不及STLDM算法的检测率,但本文算法的虚警率相比较其降低了0.237。综合而言,本文算法相比较于其他算法,能够得到较好检测结果的同时保持更低的虚警率。
data8数据序列中存在目标丢失以及画面模糊等现象,导致本文算法的检测效果不及STLDM检测算法。这是由于STLDM算法采用了局部帧差分的思想,当某帧中目标丢失,但下一帧或隔几帧目标又重新出现,那么通过隔帧相差,目标的灰度值还是存在,便尽可能不会漏检目标。而本文算法仅仅在时域采取了目标灰度值的变换大小进行差分运算,当目标在图像中丢失时灰度值大小并没有改变,目标没有得到增强,检测效果也就不好。因此在利用目标时域的灰度值变化,同时加上隔帧差分的思想,可以进一步提高检测效果。
3 结 论
本文针对远距离复杂场景提出了时空域滤波融合的方法进行红外小目标检测。在空间域,采用相对局部对比度算法(RLCM)增强目标,同时抑制高亮度背景。在时间域,通过时域局部差分算法(TLCD)来消除固定高亮噪声点的干扰。融合时域和空域的检测结果,可以更好地增强目标与背景之间的差异性,抑制高亮度噪点,从而更准确地提取出目标,大大降低了虚警率。有效的红外小目标检测在精确制导以及安防预警中起到重要作用,检测出低虚警率的红外小目标为后期对真实目标的实时跟踪提供了良好的基础。
