深井钻进时井底钻头造斜导向系统的分析与建议
2022-12-06汤凤林赵荣欣段隆臣
汤凤林,НескоромныхB.B.,赵荣欣,周 欣,段隆臣
(1.上海市建筑科学研究院有限公司,上海 200032;2.中国地质大学(武汉)工程学院,湖北 武汉 430074;3.СибирскийФедеративныйуниверситет,г.Красноярск,660095,Россия;4.湖北省地震局,湖北 武汉 430064)
1 概述
何谓深井?如何界定?国家标准《石油天然气钻 井 工 程 术 语》(GB/T 28911—2012)将4500~6000 m深度的井定为深井,6000~9000 m的井定为超深井,大于9000 m的井称为特深井;地质矿产行业标准《地质岩心钻探规程》(DZ/T 0227—2016)将1000~3000 m的钻孔称为深孔,超过3000 m的钻孔称为特深孔;大陆深部钻探孔深划分为浅钻(深度<2000 m)、中 深 钻(深度2000~5000 m)、深钻(5000~8000 m)和超深钻(深度>8000 m)和超万米的特深钻井[1-9]。
但是无论如何划分,其共同点皆是:随着深度的增加,地层压力变大,井壁稳定性变差,温度升高,井眼轨迹难以控制,钻进遇到很多困难。井眼越深,井筒越长,哪怕开始时小的偏斜,也会造成井底“差之毫厘,失之千里”[1-9]。
在深井钻进中,特别是超深井钻进中,为了提高钻井效率、保证钻井质量和降低井眼弯曲强度,一般都使用钻柱下部组合装置(КНБК)。在这种组合装置中,常常使用满眼钻具,见图1(a)。满眼钻具中,一般要用3~5个扶正器(稳定器),上扶正器可以抵消由于其上钻具弯曲产生的横向力,使其下钻具居中。中扶正器可以抵消其上一根钻铤一旦弯曲产生的横向力,使其下部钻铤处于井眼中心,也可帮助下扶正器抵消横向力。下扶正器的作用是抵消地层横向力,限制钻头横向移动。钻具上至少要有3个稳定点,通过三点直线性来保持井眼的直线性和限制钻头的横向移动。俄罗斯科拉超深井SG-3使用的钻柱井底下部组合钻具,见图1(b)。使用上述井底组合钻具时,可以产生动力学分力,起动力学稳定作用,有利于使钻具围绕井眼中心线回转,减缓井筒弯曲,提高钻井效率,保证钻井质量[1]。

图1 井底钻具组合Fig.1 Downhole drilling assembly
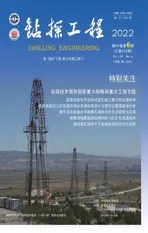
在井眼下部组合钻具中常用的动力学稳定装置(扶正器),其主要类型及特点见表1[10]。
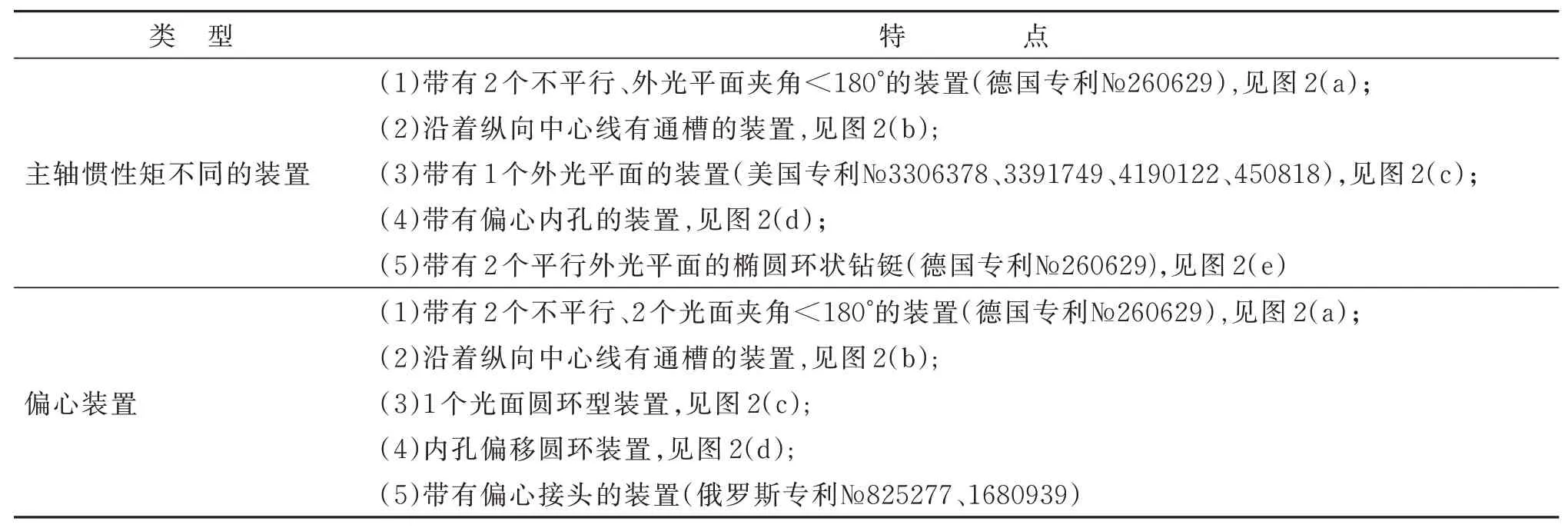
表1 动力学稳定作用装置(扶正器)类型Table 1 Types of dynamic stabilization devices
在钻柱下部组合钻具中,钻铤起着重要的作用,常用的钻挺有偏心钻铤和主轴惯性矩不同的钻铤,见图2。

图2 偏心钻铤、主轴惯性矩不同钻铤的剖面Fig.2 Cross-section of the eccentric drilling collar and the drilling collar with different axial rigidity
2 回转导向系统(RSS)
在深部钻井中,俄罗斯专家建议大力使用回转导 向 系 统Роторныеуправляемыесистемы——РУС(Rotary Steerable System——RSS),其中破碎岩石是利用顶驱钻杆驱动的钻头以回转方式进行的,同时利用孔底钻头造斜系统进行造斜钻进。在这种系统中,含有遥控系统和导航系统,可以控制井眼的方向,精度很高(±0.1°),钻井深度可达13 km,回次长度可以达到1000 m。这是一套远距离控制的电子机械设备智能导向系统,见图3[10-21]。

图3 井底钻头造斜系统框图Fig.3 Block scheme of the downhole bit deflection system
从图3可见,这种系统具有独立的电源4,操作人员通过计算机10进行控制,形成信号,将其通过钻井液或电磁辐射通道8传到井底装置,在此通过电子部件3和造斜器具1的驱动装置2给出井眼方向需要改变的设计方向。同时,遥测系统5随时监测井眼弯曲角度参数,通过电子部件6和信号传递部件7,把信号传递给地面信号接收和放大部件9、计算机10、井场平台目控钻进情况的仪器11和操作人员。如此相互作用结果,可以相当准确地确定出修改井眼方向的方案。
使用这种回转导向系统的优点是:
(1)不会使井筒变窄,有利于有效排除岩屑;
(2)由于可以有效排出岩屑,防止其沉淀,有利于岩石破碎过程,所以提高了钻井速度;
(3)由于整个钻柱都是回转的,减少了钻柱和井壁的摩擦力,增加了钻井深度;
(4)由于回转导向系统没有与套管柱、造斜器具和井壁接触的活动零部件,所以降低了卡钻的风险。
3 回转导向系统的形式
回转导向系统主要是利用钻头的偏置来进行造斜,它有3种形式,即推动钻头造斜(push-the-bit)方式、指点钻头造斜(point-the-bit)方式以及把二者结合起来的回转导向系统[10]。
3.1 利用推动钻头造斜(push-the-bit)方式的回转导向系统
这种方式主要是利用在造斜力POT的作用下铣切井壁,非对称破碎井底岩石,以增加井眼弯曲强度。在钻头造斜系统中,依靠的是由于以压力Pp向井壁施加压力的切削块2的伸出而使钻头产生的造斜力POT(见图4和图5)所致。
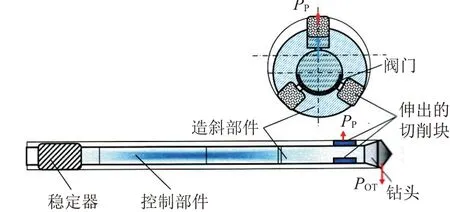
图4 利用推动钻头造斜的回转导向系统Fig.4 RSS with bit deflection
图5 利用钻头径向位移回转导向系统弯曲半径计算用图Fig.5 Diagram for calculating the distortion radius of RSS with bit radial displacement
造斜力POT与冲洗液的压力、从水力腔室方面看伸出切削块的面积有关[10],即:
式中:ρж——水力腔室中的冲洗液压力,MPa;Sп——从水力腔室方面看伸出切削块的面积,m2;L——RSS的长度,m;l2——伸出切削块到稳定器的距离,m。
如果钻头半径Rд=147.65 mm,壳体半径Rо=122 mm,稳定器半径Rц=140 mm,l1=0.7 m,l2=2.5 m,切削块伸出高度H=30~26.75 mm,则按公式计算得曲率半径R=152~350 m[10]。
切削块2的驱动装置是由水力(钻井液)驱动的,是利用后来向相应液压室供给的钻井液实现的。为了增加造斜角度,转动切削块,使其位于井筒的底部,压向井筒的下帮。如果想减小造斜角度,则切削块可以压向井筒的上帮。利用遥测系统发出的指令,可以沿着水力脉冲通道或电磁联系通道,决定钻头铣鞋启动的时间和力度。位于造斜器部件5上方的控制部件,带动转动阀门(盘阀),根据钻柱的转动情况关闭或开启向装有切削具的腔室供给钻井液的通道。Power Drive SRD系统盘阀控制结构如图6所示[8]。

图6 Power Drive SRD系统盘阀控制结构示意Fig.6 Plate valve control structure in Power Drive SRD
从图6可见,钻井过程中钻柱内、外的钻井液压力差是该系统支撑翼肋支出的动力。控制轴从控制平台延伸到下部的翼肋支出控制机构,底端固定有上盘阀,上盘阀的转动角度由稳定平台控制。下盘阀固定在井下偏置工具内部,随钻柱一起转动,其上部的(钻井液)压力孔分别与翼肋支撑液压腔体相通。导向系统进行工作时,稳定平台控制上盘阀相对稳定,而随钻柱一起回转的下盘阀上的液压孔,将依次与上盘阀上的高压孔接通,钻柱内部的高压钻井液通过该临时接通的高压通道进入相关的翼肋支撑液压腔体,在钻柱内外压力差的作用下,翼肋被支出。这样,随着钻柱的回转,每个支撑翼肋都将在相同位置支出,为钻头提供一个测向力,产生导向作用。
本系统可以同步测量切削具作用的部位和力度,对井壁施加作用,从而引导钻头的方向。钻头可以通过侧部装置以铣切井壁方式来保证井筒弯曲。所以,在RSS系统的弯曲过程中,钻头起着很大的作用,故对钻头有一定的要求[1-7]。
Schlumberger公司研发的大功率、进行强力弯曲的Power Drive Vortex控制系统,见图7。该系统使用的是转子-定子7×8的井底螺杆钻具,冲洗液用量为77 L/s时的扭矩为24.4 kN·m。该系统钻头的直径为279.4~120.7 mm,系统长度为15.42 m[10]。
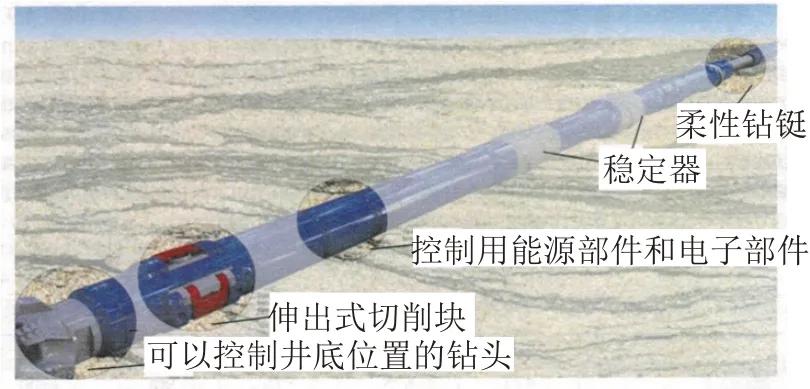
图7 钻头造斜的Power Drive Vortex控制系统Fig.7 Control system of Power Drive Vortex with bit deflection
控制系统使用的Control Collar(能源部件+电子部件),见图8{10}。
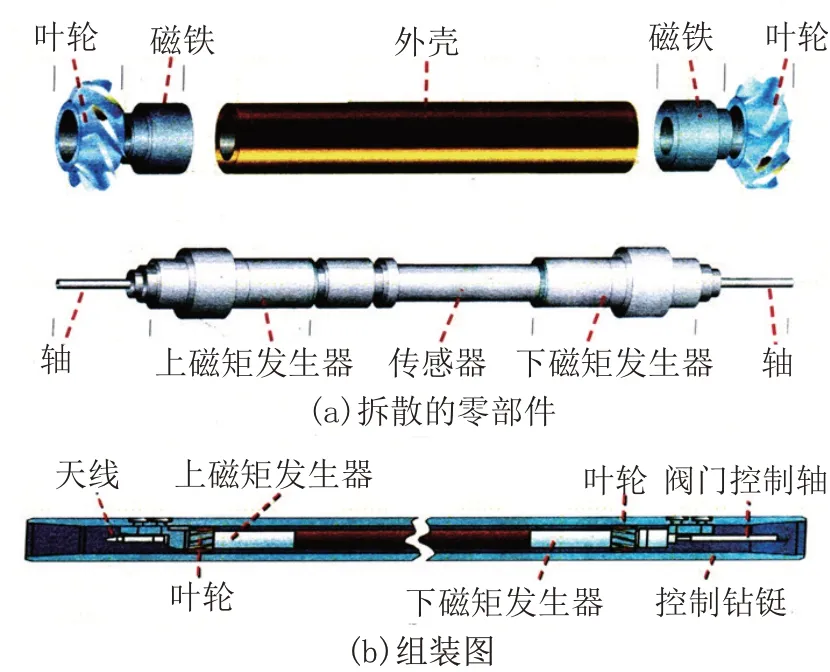
图8 控制系统用的Control Collar(能源部件+电子部件)Fig.8 Energy part and electronic part of Control Collar for the control system
Control Collar部件由钻铤和置于其中的Control Unit组件组成。Control Unit组件含有2个叶轮,这2个叶轮由冲钻井液流驱动回转,由2个磁矩发生器带动,向2个彼此相反的方向回转。这个Control Unit组件还装有与遥测系统实时连接用的天线、与切削具控制阀门连接的轴,以及控制用传感器和装置的电子部件。
Control Unit的目的是保持钻头切削具造斜方向与仪器初始安装的记录程序或从地表联系通道传来的程序规定的方向一致。
从图8可见,钻井液通过钻柱和本系统时,带动叶轮和固定在其上的磁铁回转。从位于传感器软件包中的传感器系统向Control Unit发出要求其围绕自身轴线转动的指令。根据要求Control Unit转动方向的不同,如果向磁矩发生器供给相应的电压(电流),则反磁矩使仪器向某个方向转动。例如,如果需要Control Unit逆时针方向回转,则下面的磁矩发生器需要逆时针方向回转。向下面的磁矩发生器供给相应的电压(电流),产生的电磁场与磁铁相互作用,产生反磁矩,使Control Unit逆时针转动。
传感器组件中的仪器有:测量地磁场和与仪器轴线定向的地磁场(磁方位角)的三轴磁力仪、测量地球重力场和与仪器轴线定向的地磁场(顶角)三轴加速度计、2个互相垂直并测量回转频率和控制相对Control Collar位置的二轴磁力仪和控制仪器相对其轴线回转的回转传感器。
3.2 利用指点钻头(point-the-bit)造斜方式的回转导向系统
这种利用指点钻头(point-the-bit)造斜方式的回转导向系统是利用造斜器具的内轴弯曲来指导钻头造斜钻进的,例如利用Geopilot系统。在这种系统中,内轴弯曲点位于钻头上方的外壳内部,见图9。

图9 利用指点钻头(point-the-bit)造斜方式的回转导向系统弯曲半径计算用图Fig.9 Diagram for calculating the distortion radius of RSS with point-the-bit deflection
对于Geopilot系统来说,其有关参数a=b=2.25 m,l1=0.8 m,l2=4.5 m,Dц=244 mm,在用直径295.3 mm钻头钻进时,经过计算造斜器具内轴的挠度等参数见表2[10]。

表2 Geopilot系统弯曲半径等计算数据Table 2 Calculated data of distortion radius of Geopilot system
在Geopilot系统(见图10)使用的控制用造斜装置中,有置于钻头和钻具上部的中空轴。在这个由不锈钢制成的轴内,有冲洗液流通用的内部通道。置于外壳不回转部分上部的造斜部件,通过2个转动的偏心套把控制的造斜传给轴,从上面和从下面与偏心套的联系是用2个传动系统实现的。
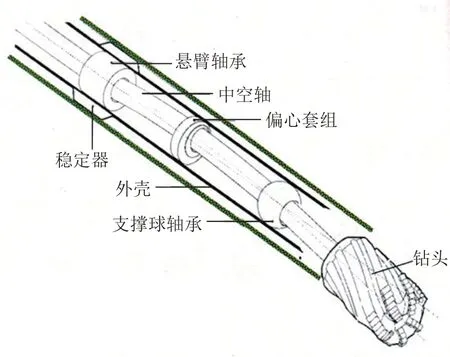
图10 Geopilot系统造斜器具示意Fig.10 Deflecting tool of Geopilot system
用1个或2个传动系统作用的结果是,偏心套组件可以一起转动,也可单个转动,把轴推向外壳轴线的一旁,迫使轴弯曲,把轴定向在造斜装置设计安装角的方向上。位于外壳内的专门设计的回转密封圈,使钻井液不能进入造斜器具内,润滑液在造斜器外面流动,保证了系统的寿命和可靠性都非常高。
通过外壳的轴,靠在固定端的上部轴承、径向支持轴承和下部游动轴承上。当偏心套组件使轴弯曲时,轴不让轴弯曲高出自己的上部固定端、让钻头在任意方向上偏斜,在自由回转的下部支撑轴承之间弯曲。由于钻头的主要载荷是通过外壳传递的,因此轴要做成比较细的和容易控制的。
位于钻头部件上部的计算机控制的部件,对轴的偏斜进行控制。
在指点钻头造斜(point-the-bit)方式的回转导向系统中,可以使用1个或2个偏心套。
在使用1个偏心套的回转导向系统中,偏心套置于造斜器外壳的内部,偏离造斜器外壳横断面几何中心一定距离,这是为了保证在钻进过程中井眼不偏斜,因为偏心套的偏心孔和造斜器外壳是同轴的,见图11。工作情况如下。偏心套1可以在围绕η方向上的自身轴线上回转,也可在围绕在τ方向上的外壳-定子2的轴线上回转。装有钻头5的轴-转子3,在偏心套1内以ω速度回转。外壳-定子2被伸出式卡瓦4固定在井内。偏心套1的转动,是利用根据计算机控制过程电子部件指令进行工作的伺服机具完成的。偏心套1的转动,带动内轴-转子3的轴偏离外壳2的中心轴线,其数值为△,钻头根据偏心套1在外壳-定子中的位置向这个或那个方向偏斜。图11(a)是钻孔不弯曲,偏心套1内孔和轴3同轴(Δ=0),钻头5不造斜的情况。图11(b)、11(c)是偏心套1转动、使轴3弯曲、钻头5造斜钻进方向改变,井眼在图内所示6方向内弯曲的情况。
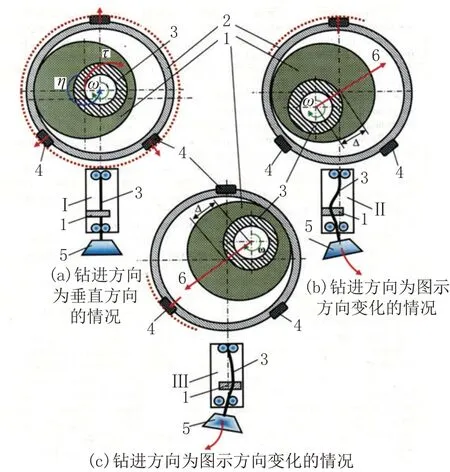
图11 钻头偏斜的回转导向系统工作示意Fig.11 Working scheme of RSS with bit deflection
在回转导向系统中,有带2个偏心套的设计(见图12),可以使这2个偏心套不偏离造斜器外壳的几何中心。在这种情况下,因为有2个调整钻头偏斜角度的系统,所以可以更好地控制井眼曲率加大的过程。
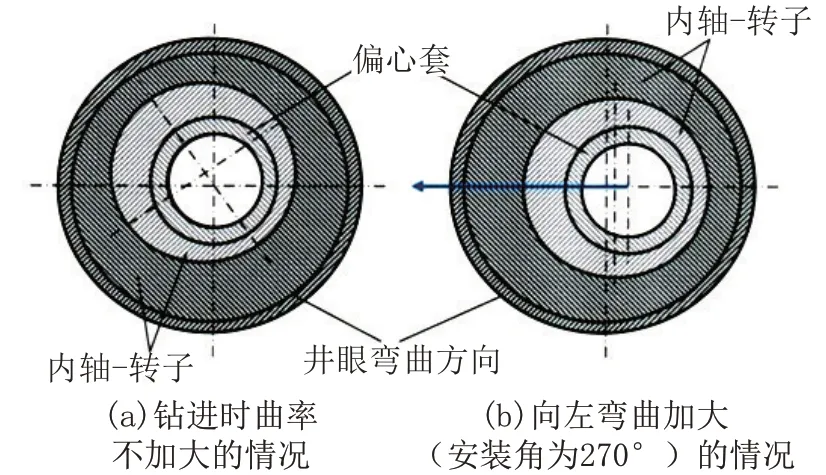
图12 偏心套不同位置示意Fig.12 Eccentric sleeves in different positions
图13示出了另一种利用对称圆环套横向偏斜来使驱动轴弯曲的示意图。这种方案是可能的,但是要有另外一个比较复杂的系统驱动装置。如果造斜器外壳尺寸有限,要求圆环套和轴做横向位移,则做到这一点是比较困难的。

图13 造斜部件位置和曲率增大示意Fig.13 Deflecting tool position and increasing of distortion intensity
3.3 推动钻头造斜(push-the-bit)+指点钻头造斜(point-the-bit)的回转导向系统——Power Drive Archer
Power Drive Archer回转导向系统是把利用钻头造斜(push-the-bit)方式的回转导向系统的性能和把利用改变钻头偏斜方向(point-the-bit)方式的回转导向系统的性能结合起来的回转导向系统[10]。
利用这个系统可以自动保持井眼的空间位置(弯曲角度)。根据井眼直径(406.4~660.4 mm)的不同,利用本系统可以使井眼的弯曲强度达到0.1°~0.3°/m[10]。
与前面讨论的回转导向系统不同,本系统不是利用从外面伸出的切削块对地层施加压力,而是利用加重钻杆内部的4个驱动活塞,从内部对在万向接头回转的圆柱形转动套施压,把钻头定位在希望的方向上(见图14和图15)。此外,在接触井壁时,位于万向接头上方套环外表面上的4个稳定器切削块,把侧压加到钻头上,使系统按照钻头造斜方式进行工作。在这种系统中,所有活动零件都置于内部,可以防止井内不良环境的作用,所以损坏的风险较小,可以增加使用寿命。

图14 Power Drive Archer回转导向系统Fig.14 RSS combining push-the-bit RSS with point-the-bit RSS
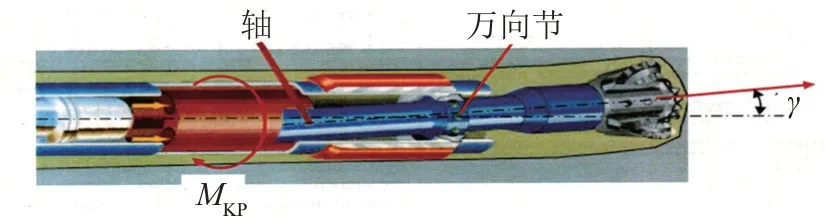
图15 Power Drive Archer回转导向系统万向接头和驱动轴的部件Fig.15 Universal joint and drive shaft parts in Power Drive Archer RSS
置于钻头端部附近、用于定位的内阀,把一小部分钻井液供给活塞,钻井液带动活塞对转动套环施压,保证钻头按设计方向定向和井眼弯曲。
钻井液阀门在空档情况下是连续回转的,所以钻头对井壁的压力是均匀分布的,钻孔的方向是稳定的。
利用这种系统可以实现稳斜钻进、增斜钻进、降斜钻进、左扭方位、右扭方位、降陡增方位等。
伽马辐射强度、顶角和方位角等参数,在钻头的上方进行测量,可以帮助操作员有效控制钻井过程。这些参数的实时数值,利用控制部件,通过水力脉冲联系通道的遥测方法传到地面。工作人员从地面将指令传到导航部件,将其变成钻井液供给速度的振荡信号,对钻进过程进行导航。
4 分析讨论与建议
根据上述资料可做如下分析与讨论。
(1)回转导向钻井系统(RSS)是一种高度智能化和自动化的井眼轨迹控制系统,是由井下闭环控制的钻头偏置机构与无线测量传输仪器(MWD/LWD)联合组成的复杂器具系统组成的。回转导向钻井中,该系统可以实时测量实钻轨迹与设计轨迹或地质目标的偏差方向、距离,按照要求的造斜率和回转导向钻井工具造斜能力给出相应的控制指令,改变导向偏置工具面向位置和造斜率,使实钻轨迹尽量向设计轨迹或地质目标靠近,并沿校正的设计轨迹钻进,准确钻到目标。
(2)这种系统是在钻柱回转情况下进行导向的,所以井眼净化效果更好,延深能力更强;可以连续导向,井眼轨道更为光滑;工具设计制造模块化、集成化,能够连续、实时、准确监测钻头的钻进方向,引导钻头在最佳位置钻进;具有双向通信能力,可以自动调节钻进方向,具有创新性。
(3)这种系统可以用于垂直井、斜井和水平井钻进,使用范围较宽,使用效果较好,具有积极使用和推广价值。
(4)这种系统美国已经研发多年,俄罗斯也在积极使用,我国石油天然气集团公司等也在进行研究并取得一定效果。建议我国地质深钻有关单位对此引起重视,进行研究开发,确认其创新性、可用性和合理性,将其早日用于深钻和超深钻探工程中。