SVM结合多阈值分类的遥感影像公路水毁信息提取
2022-12-05方留杨,刘天逸,赵孟云,谷永云,贾志文
方 留 杨,刘 天 逸,赵 孟 云,谷 永 云,贾 志 文
(1.昆明理工大学 国土资源工程学院,云南 昆明 650031; 2.云南省交通规划设计研究院有限公司,云南 昆明 650200)
0 引 言
2018年11月3日,四川省甘孜藏族自治州白玉县与西藏自治区江达县境内发生山体滑坡,滑坡体落入金沙江干流中堵塞河道形成了堰塞体。2018年11月12日,为了防止危害进一步扩大,政府决定对堰塞湖进行人工开挖泄流,堰塞湖开挖后形成的洪流对迪庆藏族自治州、丽江市沿江公路造成严重破坏,其中德钦县羊拉乡与拖顶乡通乡公路全线瘫痪,沿江多座大桥被完全冲毁,整体受灾情况较为严重、损失巨大。因此,快速确定公路损毁位置与范围等信息对灾害救援与灾后重建具有重要意义[1]。
公路灾后相关救援与重建等工作对前期不同时段的灾情信息有很强的依赖性。目前国内外学者对采用遥感影像进行信息获取已有一定程度的研究。赵福军使用面向对象的分类方法完成了汶川地震灾害信息与衍生灾害信息的信息提取[2];曾涛等以高分辨影像作为数据源,对震后房屋尺度参数进行深入分析与选择,实现了震后房屋信息提取[3];Hinz等基于复杂场景影像中的光谱、形状、空间特征以及车辆检测模块,实现了城市中道路网的自动提取[4];Herumurti等提出了基于斑马线的道路检测方法,提高了城市道路网提取的精度与速度[5];赵文智等着重利用公路的光谱特征,引入自适应算法实现基于面向对象的方法对道路信息进行提取[6]。
纵观国内外研究现状,基于面向对象的高分辨率遥感影像信息提取方法已广泛应用于城市道路网提取与地震灾害检测中,但采用面向对象的信息提取方法对山区公路进行水毁检测还缺乏系统性的研究。另外,目前基于遥感影像的水体信息提取大多依赖近红外波段,对于没有近红外波段的RGB影像没有通用的方法。为解决上述问题,本文首先对各种影像特征进行逐一实验,并选取出各类特征中的最优值,确定公路水毁灾害遥感影像最优分割尺度,然后提出一种亮度与光谱结合的自定义波段特征CCBS(Combination characteristics of brightness and spectral)结合多种影像特征对支持向量机分类结果进行优化的分类方法,分别提取灾前道路和灾后水体信息,并利用种子增长法对灾后水体提取结果进行优化,最后将灾前道路映射至灾后水体上提取出公路水毁路段信息,以满足在高分辨率遥感影像中对公路水毁路段信息进行高精度提取的要求。
1 研究数据与方法
1.1 数据概况
本文研究区域为金沙江白格堰塞湖泄流溃坝影响下的迪庆自治州德钦县拖顶乡S226县道水毁路段,此路段受到开挖堰塞湖泄流的影响,大部分公路被冲毁。本文选用两幅经过融合处理的高分2号(GF-2)影像图进行分析,如图1所示,实验数据为公路水毁前和公路水毁后两幅高分2号遥感影像,成像时间分别为2017年11月10日和2018年11月14日。裁剪出公路水毁信息严重的区域作为实验区域进行研究,研究区中主要提取4类地物,分别是水体、公路、植被和其他。
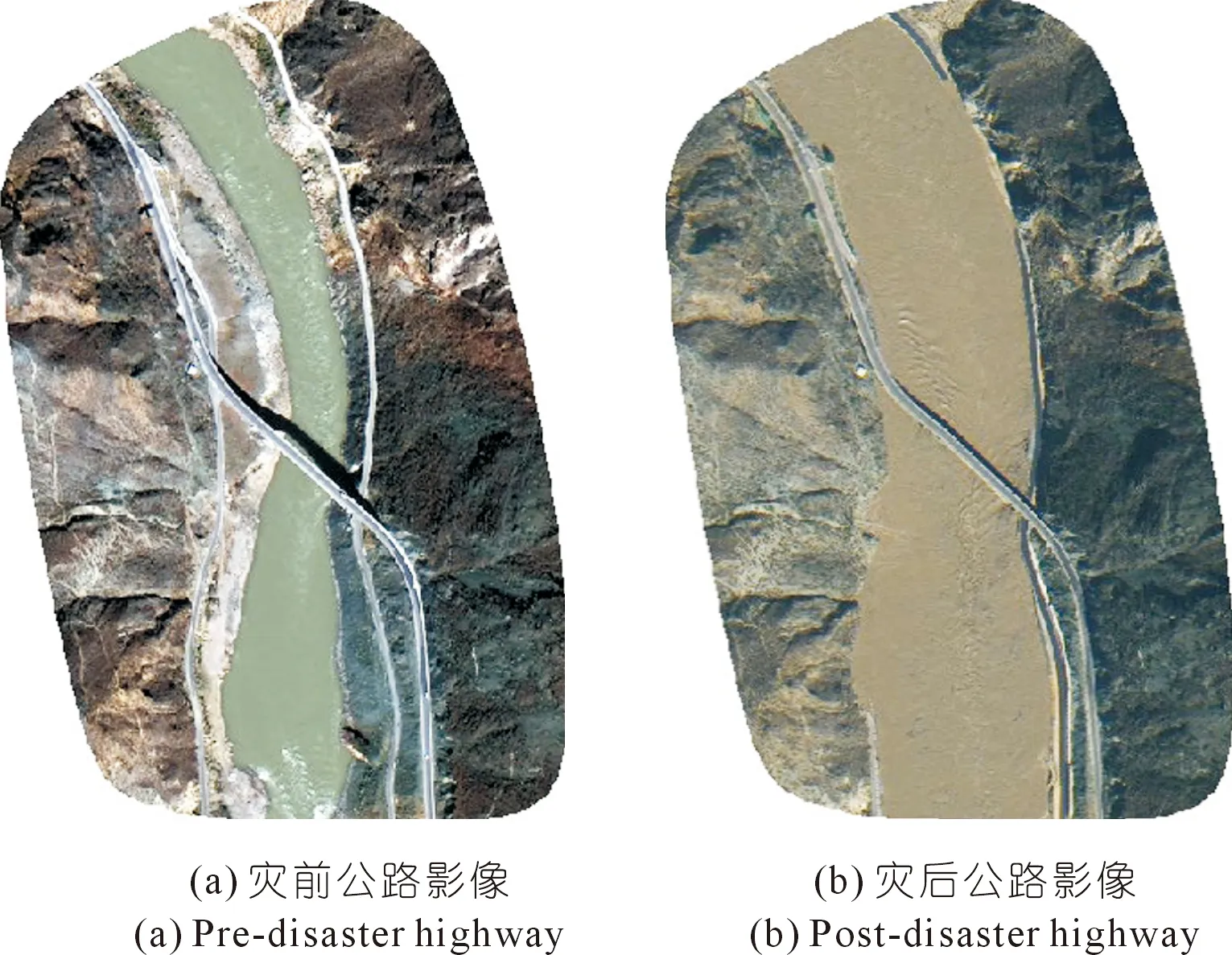
图1 研究区灾前灾后公路影像数据
1.2 技术路线
本文技术路线如图2所示,首先对获取的灾前、灾后影像进行多尺度分割。在分割对象的基础上,提取出分割对象的特征信息,人工选择具有分辨度的特征建立阈值分类的规则集。采用支持向量机结合多阈值的分类方法,重点提取出灾前、灾后公路和水体信息,利用种子增长法对灾后水体进行优化。最后对灾前公路分类所得到的结果信息和灾后水体分类结果信息进行分析,两者重叠部分即为提取出的公路水毁路段。

图2 研究技术路线
1.2.1多尺度分割
本文采用的多尺度分割原理是:首先以像元为基础,将小范围内像元合并为同质性较高的分割对象,然后以紧致度因子、平滑度因子、形状因子、光谱因子作为参考要素,再次合并分割对象。此时,分割对象异质性将会不断增大,当异质性到达设定的临界尺度时,停止合并,设定的尺度参数会决定最终合并效果。区域异质性包括光谱异质性和形状异质性两个方面。其中形状异质性由紧致度因子和平滑性因子组成[7]。影像对象异质度用f表示,且异质度包括以下4个变量:ω1(形状权重)、ω2(紧致度权重)、h1(形状异质性)、h2(光谱异质性)。计算公式为
f=ω1h1+(1-ω1)h2
(1)
式中:ω1表示规定的形状权重,且0≤ω1≤1;h1为形状异质性、h2为光谱异质性,其计算公式为
h1=ω2k1+(1-ω2)k2
(2)
(3)
式中:ω2表示规定的紧致度权重,且0≤ω2≤1;λi为第i波段所占权重;n为波段总数;σi为第i波段的光谱值的标准差;k1为分割对象紧致度参数;k2为分割对象边界平滑度参数。
公式(4)~(5)分别是影像对象紧致度k1与影像对象边界的平滑度k2计算方法:
(4)
(5)
式中:E表示对象边界总长度;N为组成对象的像素总数;S为对象最小矩形的周长。
在面向对象分析中,由于各类地物之间存在不同的形状、光谱等特征,不同地物会存在各自最合适的分割尺度,这导致了各类地物选择的分割尺度一般不同。因此,在对对象进行分类和提取时,选择最优分割尺度是分割中的重要问题[8]。本文采用局部方差法进行最优分割尺度选择,当尺度参数逐渐增加时,局部方差值趋于平稳,直到局部方差不随着尺度的变化而变化时,将此时的尺度定义为最优尺度。方差变化率可以用来描述局部变化(Local variance,LV)与尺度变化之间的关系,如公式(6)所示,尺度一般不同。因此,在对对象进行分类和提取时,选择最优分割尺度是分割中的重要问题[8]。本文采用局部方差法进行。
(6)
式中:LVj为尺度j对应的局部变化值;LVj+1为尺度j+1对应的局部变化值;ROCl为尺度j对应的局部变化值变化率。
生成ROC曲线后,在ROC曲线的基础上通过观察局部方差的变化情况选择最优分割尺度。ROC曲线处于峰值点位置时的分割尺度都可以作为优质分割尺度,为了筛选出优质分割尺度中的最优解,对所有选择的分割尺度进行对比,再通过目视观察选择出效果最好的影像分割结果,将其分割尺度作为最优分割尺度。
1.2.2支持向量机结合多阈值分类方法进行公路和水体信息的粗提取
本文在影像分割基础上运用支持向量机方法(Support vector machine,SVM)对影像进行初次分类。支持向量机对影像进行分类时,将训练样本以最优超平面为依据进行分类,并使不同的训练样本之间的间隔为最大值,在满足分类精度的同时,将分类对象最大限度的区分开,其主要思想为
k=1,2,…,n
(7)
式中:xk∈R,表示输入模式;yk∈{±1},表示目标输出;ω为权值向量;b为偏置。
多阈值分类主要通过提取各类地物的特征,将特征作为阈值参数,用以编写具有区分度的规则,实现影像对象中多种地物的分类[9]。根据遥感影像中不同目标的不同特征属性,采用一定的特征阈值提取目标。多阈值分类的主要分类思想如公式(8)所示:
iffeature1>a,andfeature2>b,…,
thenclass1,elseclass2
(8)
本文多阈值分类规则集选用光谱特征、形状特征、纹理特征和自定义特征指数。
(1) 光谱特征。光谱特征主要包括各波段的光谱均值,其公式为
(9)

(2) 形状特征。形状特征主要包括密度、长宽比、面积,其中长度、宽度、面积与像元数有关,密度公式为
(10)
式中:Var(x)和Var(y)为像素点x坐标和y坐标的方差,n为像素个数。
(3) 纹理特征。本文主要采用灰度共生矩阵法对纹理特征进行描述,通过分析各类纹理值,选取能够提取出公路的特征值GLCM进行规则集创建。
(4) 自定义特征CCBS。对公路水毁灾害发生后的公路和水体遥感影像波段特征进行分析,提出一种亮度与光谱结合的特征因子CCBS,提高对公路和水体的区分能力,如式(11)所示:
CCBS=[Brightness]+B-G×2
(11)
式中:Brightness为亮度,B为蓝波段,G为绿波段。
通过对比灾前、灾后影像初次分类可以发现支持向量机分类方法存在错分或者漏分的情况,道路错分为其他地物的情况尤为明显,此时嵌入多阈值分类方法可以进一步完善分类结果。通过分析支持向量机与多阈值分类的优势,本文提出在公路水毁灾害信息提取中采取基于支持向量机结合多阈值分类的分类方法。此方法可以在支持向量机分类方法的基础上,充分发挥多阈值分类的优势,将支持向量机分类后的结果进行优化,从而提高目标分类类别的精度。
1.2.3种子增长方法提取水体
本文实验数据中缺少近红外波段,因此常规水体提取方法并不适用,仅有可见光波段的情况下,可以使用种子增长法进行水体提取。种子生长法是从一个像元或者一片像元开始,以设定的生长规则来判断相邻像元的聚合或分离,并遍历整幅影像,从而实现对影像所有连通区域的信息识别和提取[10]。本文将灾后影像中100%为水体的区域作为种子,以此区域为中心向外扩大,为种子对象创建候选对象缓冲区,再使用粗糙度等类间相关特征增长水体。具体流程如图3所示。
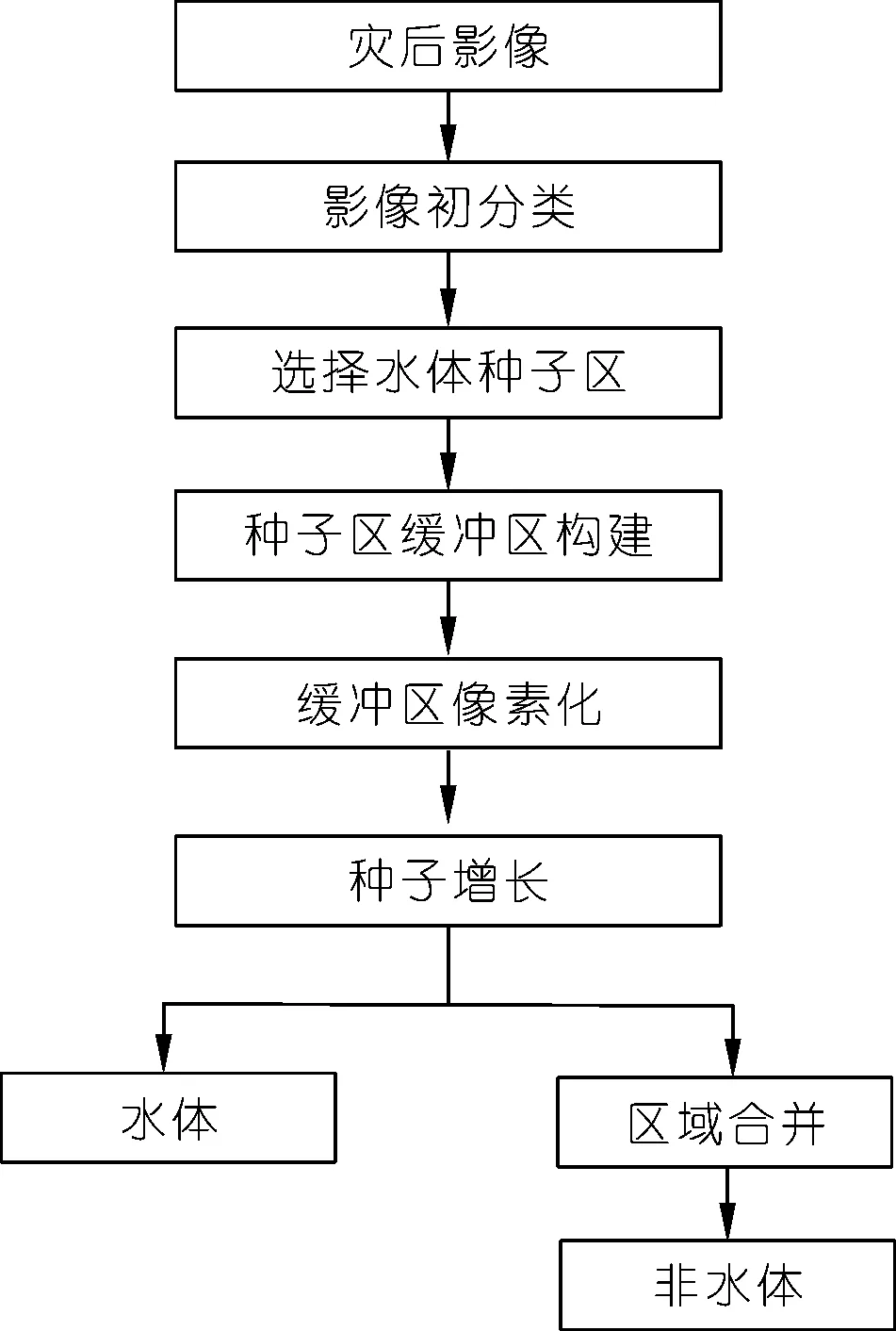
图3 种子增长法流程
1.2.4水毁路段提取
首先,将实验影像进行地理空间坐标配准,分别提取出水毁灾害发生前与水毁灾害发生后的公路与水体影像信息,并将受灾前公路矢量映射至受灾灾后水面矢量上,即可得到水毁路段信息。
2 实验与分析
2.1 最优尺度选择
为了对实验区域遥感影像(如1.1节所述)进行最优尺度分割,选取波段权重、尺度参数、形状因子、紧致度因子进行实验,具体实验过程和结果如下:
(1) 波段权重。首先对影像进行主成分分析,实现各光谱特征增强,然后对具有代表性地物的DN值进行统计,统计结果如表1所列。表1中主要对本文实验中波段的均值、方差、特征值与特征值百分比进行分析统计,其中方差越大波段所占比重越大,表中3个波段比例大致为1∶1∶1,以此为参考进行实验。
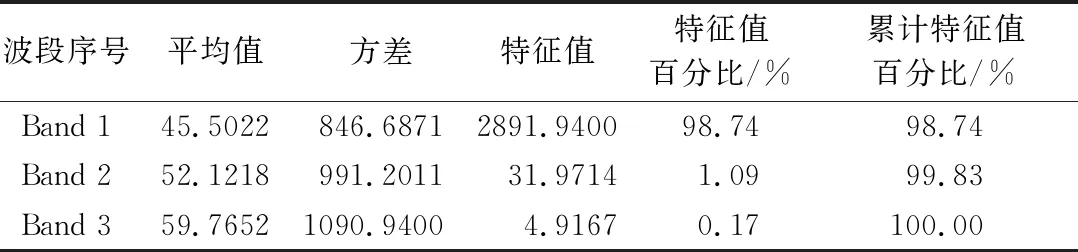
表1 波段光谱信息分析
实验结果如图4a(1)~c(1)所示,仅对波段权重进行设置,尺度参数、形状因子、紧致度因子设置保持一致。图4a(1)中RGB波段权重为0,0,1;b(1)中RGB波段权重为1,1,1;c(1)中RGB波段权重为2,1,1。本次试验中多尺度分割操作受到波段权重的影响不大,但各分割结果中也存在细微的差别;a(1)分割结果相较于c(1)、b(1)更为细碎,存在冗余部分;c(1)大多数植被分割较为细碎与其他地类分割结果较为相似,可能会对后续分类造成影响;b(1)相对分割效果最好。
(2) 尺度参数。在波段权重、紧致度因子、形状因子设置不变的情况下,使用ESP2模型工具进行最优尺度参数分析及选择,其结果如图5所示。当ROC值逐渐趋于平稳时,ROC峰值点所对应的分割尺度分别为11,31,39,在这3种分割尺度下,分割结果能和周围对象有较好地区分。选用11,31,39这3种尺度分别进行实验并对比实验结果,实验结果如图4a(2)~c(2) 所示,a(2)中选择的分割尺度为11,分割完成后对象过于细碎,存在过度分割现象,会对后续分类结果造成一定的影响;c(2)中选择的分割尺度为39,有大量植被区域与其他地物分割至同一个对象中;b(2)中选择分割尺度为31时分割效果良好。
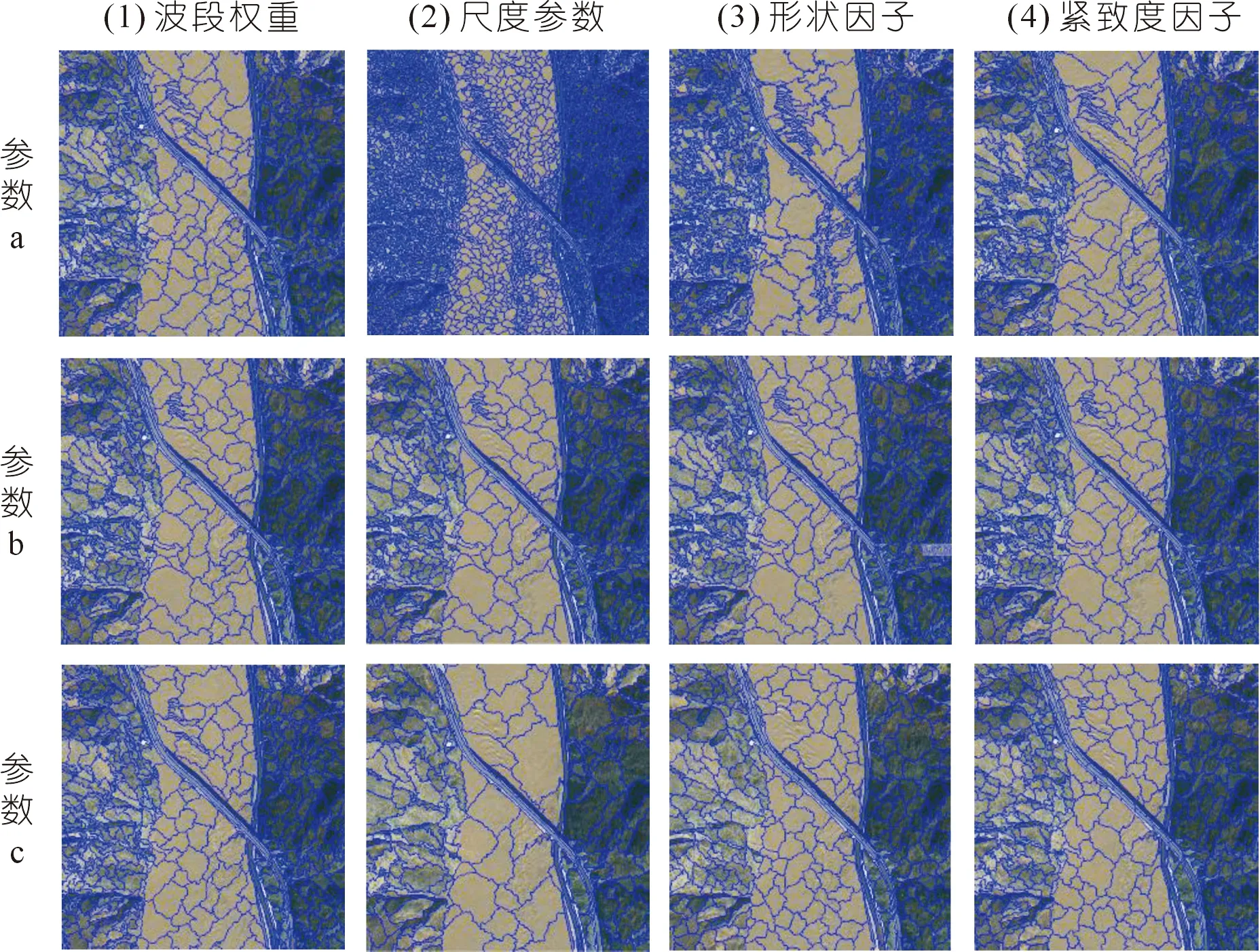
图4 不同条件下分割对比

图5 ESP2模型插件分析结果
(3)形状因子设置。形状因子选择时保证波段权重、尺度参数、紧致度因子设置保持一致。对形状因子设置进行对比实验,结果如图4a(3)~c(3)所示。a(3) 形状因子占权重为0.1,对应的颜色权重占比过大,分割过于细微;c(3)形状因子占权重为0.6,颜色因子仅有0.4,植被与其他地物在颜色特征上有较大的区别,但是不能很好地区分开;b(3)形状因子占权重为0.4,颜色因子占比为0.6,既能较好地利用形状因子分割出道路,也能利用颜色因子分割出植被与其他地物,总体效果较好。
(4) 紧致度因子设置。紧致度因子与平滑度因子互补并同属于形状因子中,用来表示分割对象的紧密程度。在波段权重、形状因子、尺度参数设置不变的情况下,对紧致度因子数值调整,结果如图4a(4)~c(4)所示。a(4)紧致度因子占权重为0.1,水体两侧山体部分分割较为破碎;c(4)紧致度因子占权重为0.7,整体过于平滑;b(4)紧致度因子占权重为0.5,显示效果较好。
通过对以上4种参数进行实验对比,实现最优分割效果,选取4种参数分别为:三波段权重取1∶1∶1,尺度参数取31,形状因子取0.4,紧致度因子取0.5。
2.2 多阈值结合支持向量机分类
本文基于eCognition平台的支持向量机(SVM) 分类功能进行影像中公路、水体、植被与其他地物的初次分类处理,基于支持向量机分类基础上,选用光谱特征、上下文特征、形状特征、纹理特征和自定义特征指数作为多阈值分类的分类属性进行多阈值分类操作。
由于实验区内影像仅存在可见光波段,无法利用其他波段对水体进行提取,因此本次实验定义CCBS特征协助区分水体与公路。通过对灾前高分遥感影像的分析,目视选取出地物类别,经过多次试验,生成合适的自定义光谱曲线的DN值,如图6所示。相较于其他波段来说,CCBS最显著的特点就是对于公路与水体处CCBS有“一正一负”的DN值特征,更易于用来区分公路与水体,本文创建的主要规则集如表2所列。
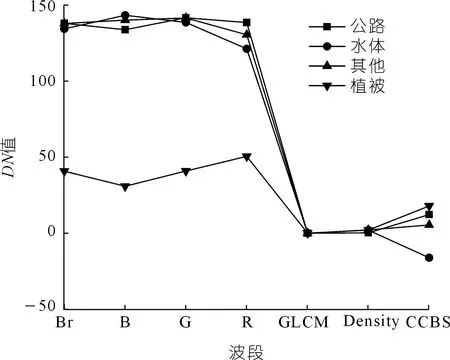
图6 不同特征下各类地物光谱曲线

表2 阈值分类规则集
为对比各分类方法效果,分别选取决策树分类、随机森林分类、阈值分类、支持向量机分类、支持向量机结合多阈值分类(本文方法)共5种分类方法进行实验,结果如图7所示。从图7(a)和(b)中可以发现,由于实验区影像中存在大量裸地,光谱信息相较于公路较为接近,因此单独使用决策树分类、随机森林分类方法对公路和水体信息的提取较为困难;图7(c)为单独采用阈值分类方法时的分类结果,可以发现道路轮廓提取并不完整,且同时存在大量错分现象,错分现象多出现于道路邻接对象中;图7(d)为单独使用支持向量机时的分类结果,虽然道路提取有较好的效果,道路邻接处的对象被很好地区分开,但是在公路与其他类别的区分中仍存在错分现象;图7(e)为采用支持向量机结合多阈值分类方法(本文方法)的分类结果,结果表明,本方法能够较好地提取道路和水体信息,分类效果较好。
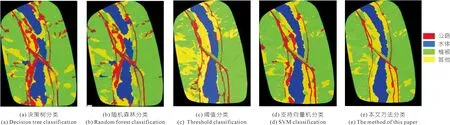
图7 各实验方法分类结果
进一步通过总体分类精度、Kappa系数2个指标对各分类方法进行定量评价。总体分类精度是正确分类的类别像元数与总的类别个数的比值;Kappa系数基于混淆矩阵计算,可以用来衡量分类的效果。本文采用总体分类精度、Kappa系数对支持向量机结合多阈值分类结果进行评定。如表3所列,将本文提出方法的结果与实际分类结果进行计算,生成混淆矩阵[19]。

表3 灾前影像支持向量机结合多阈值分类结果混淆矩阵
在混淆矩阵的基础上计算得出5种方法灾前、灾后影像相应总体分类精度与Kappa系数,如表4所列。
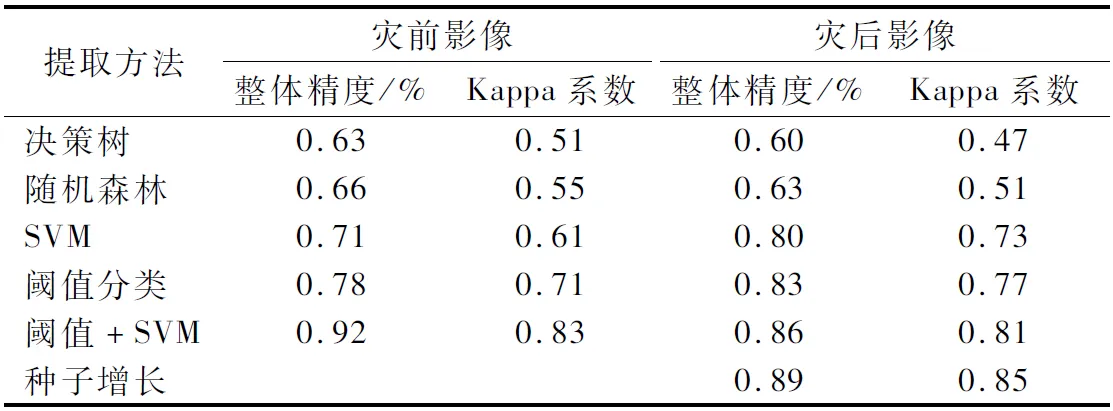
表4 灾前、灾后精度和Kappa系数
由统计结果可知,采用支持向量机结合多阈值分类方法对遥感影像进行道路的提取,种子增长方法对水体进行提取,总体精度与Kappa 系数相较于其他方法有明显优势。
2.3 局部水毁路段提取结果
通过种子增长法对灾后水体提取,减少支离破碎的水体信息,水毁路段提取结果如图8所示,提取出的灾后水体矢量较为完整,图中不存在破碎图斑。
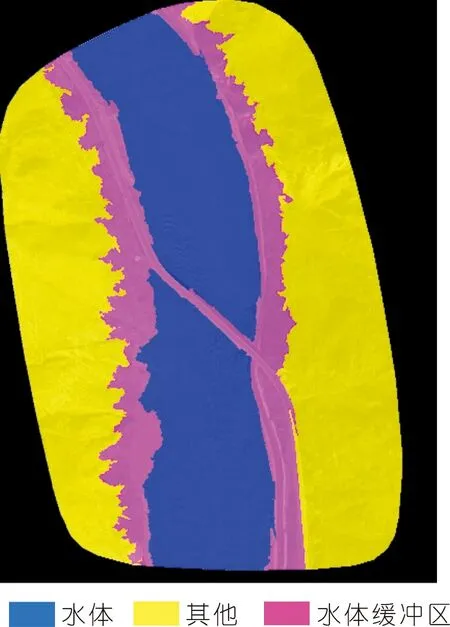
图8 种子增长算法灾后水体提取结果
通过对灾前公路和灾后水体进行叠加分析,提取结果如图9所示,图9中表示公路已经发生水淹的路段信息,能够得出公路已经被水冲毁的区域信息情况。

图9 水毁路段示意
2.4 大面积水毁路段提取结果
为进一步验证本文方法对更大范围水毁公路的检测能力,选取同区域另一段受损里程更长的路段进行实验(影像面积扩大约10倍)。首先,通过波段光谱信息分析与ESP2插件分别计算波段权重与尺度参数,再根据影像特征选取形状因子与紧致度因子,4个参数取值分别为:三波段权重取1∶1∶1,尺度参数取56,形状因子取0.5,紧致度因子取0.5。然后,采用支持向量机结合多阈值分类方法提取的道路信息,利用种子增长方法提取灾后水体信息。从提取结果可知,在大范围影像中,水体、植被、公路、其他类别中特征与小范围实验中各类别特征具有一致性。以道路信息与水体信息为基准,检测公路水毁信息,最终提取效果如图10所示。
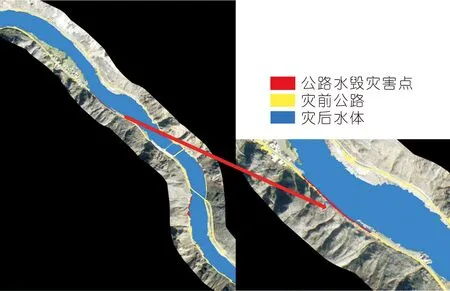
图10 大面积水毁路段示意
对提取精度进行评定,混淆矩阵如表5所列。从混淆矩阵可知,灾前影像总体分类精度与Kappa系数分别为0.90,0.81,灾后影像种子增长方法提取信息总体分类精度与Kappa系数分别为0.86,0.81,与小范围实验相比基本保持一致,同样优于文中用作对比的其他方法,说明本文方法具有一定普适性,可以较好地适应“V”形高山峡谷水毁灾害易发区。最终得到公路水毁部分的长度、面积信息如表6所列。

表5 灾前大面积水毁路段分类结果混淆矩阵

表6 公路水毁信息
3 结 语
本文对金沙江白格堰塞湖泄流溃坝影响下的迪庆自治州德钦县拖顶乡S226县道水毁路段进行分析,首先采用最优分割尺度对高分辨率遥感影像进行分割,然后通过支持向量机结合多阈值方法与种子增长法对公路与水体进行提取,最后将公路与水体的高精度提取结果通过叠加分析,快速提取出灾后公路水毁信息。实验结果表明:本文提出的支持向量机结合多阈值分类方法能够很好地对高原山区地区进行水毁公路信息提取,实验成果可以为后续开展应急救援和灾后重建工作提供数据基础。
