高速磁悬浮永磁电机三电平无速度传感器控制
2022-12-03姜建国
张 丹 姜建国
高速磁悬浮永磁电机三电平无速度传感器控制
张 丹1,2姜建国2
(1. 上海海事大学物流科学与工程研究院 上海 201306 2. 上海交通大学电力传输与功率变换控制教育部重点实验室 上海200240)
针对中点钳位(NPC)三电平变换器在高频状态下的中点电压不平衡问题,采用基于GH坐标系的三电平调制方式和基于比例调节因子的中点电压平衡控制方法。针对高速磁悬浮永磁电机高频状态下的转速辨识与高速稳定运行问题,采用适用于高速旋转磁场的磁悬浮永磁电机无速度控制方法。对所提控制方法进行仿真验证,并进行现场应用。实测结果表明,所提控制策略能够实现无位置传感器情况下高速磁悬浮永磁电机的转子位置定位和低速起动控制,并实现高速稳定运行。所提高速磁悬浮永磁电机控制方法具有很好的实际应用价值。
高速磁悬浮电机 NPC三电平变换器 中点电压平衡 无速度控制
0 引言
高速磁悬浮永磁电机包括高速永磁电机和磁悬浮系统。根据电机转速的大小,可将电机分为低速电机和高速电机。以10 000r/min为界限,低于10 000r/min称为低速电机,高于10 000r/min称为高速电机。永磁电机可分为永磁无刷直流电机、永磁同步电机等,其功率密度高、结构简单,受到越来越多的关注。随着“碳达峰、碳中和”战略目标的实施,节能和储能问题成为我国电力能源转型关注的热点。高速磁悬浮永磁电机具有效率高、寿命长和动态响应快等特点,在电力节能与储能方面具有独特的优势。因而,高速磁悬浮永磁电机在电力系统、大数据中心、医疗卫生、交通运输和航空航天等领域具有广泛的应用前景。
目前,国内外研究人员对高速磁悬浮永磁电机(High Speed Maglev-Permanent Magnet Motor, HSM- PMM)本体的多物理场研究较多,而针对高速磁悬浮永磁电机控制研究较少。高速磁悬浮永磁电机研究的热点之一是高速永磁电机转子结构、轴承-转子动力学和定子结构等。文献[1-3]从多物理场角度综合设计18 000r/min高速永磁电机,对不同冷却方案进行温度场分析,并分析其柔性转子系统模态。文献[4]对40 000r/min高速永磁电机的电磁轴承转子系统进行动力学研究。文献[5]对7 995r/min的高速永磁同步电机线圈与绕组电枢磁场关系进行仿真分析。文献[6]对一台30 000r/min的非晶合金高速永磁电机进行转子物理结构对机壳水冷全封闭式高速永磁电机转子散热的影响进行研究。文献[7]针对表贴式高速永磁电机在高速高温工况下的转子强度分析问题,提出考虑轴间填充物的电机转子结构模型。文献[8]针对齿槽效应引起的高速永磁电机转子涡流损耗,提出精确解析计算模型。高速磁悬浮永磁电机磁悬浮系统包括位移传感器、功率放大器、转子、线圈、磁轴承、电磁铁和控制器等。按照磁力提供方式,可以将磁悬浮轴承分成三种:主动磁悬浮轴承、被动磁悬浮轴承和混合磁悬浮轴承[9]。文献[10]设计了适用于主动磁悬浮轴承高速电机转子系统的内模控制器,分析参数对系统稳定性和抗干扰能力等因素的影响,并在额定转速为24 000r/min的主动磁轴承高速电机平台上进行了相关的验证。
功率变换器和高速永磁电机可靠控制是高速磁悬浮永磁电机稳定运行的前提条件。基于NPC三电平变换器的变频调速控制,主要的调制方式包括载波层叠脉冲宽度调制、空间矢量脉冲宽度调制、开关频率最优脉冲宽度调制和特定谐波消除脉冲宽度调制等。但是,对于基于Nautral Point Clamped, NPC三电平变换器的高速磁悬浮永磁电机控制,其控制的挑战与难点在于高基波频率高载波频率状态下NPC三电平变换器中点电压平衡控制和高速永磁电机高频稳定控制。探索适用于基于NPC三电平变换器的大功率高速磁悬浮永磁电机调速控制具有一定的研究意义。
无速度传感器控制是高速永磁电机稳定运行的难点之一。文献[11]基于模型参考自适应算法对磁链观测方法进行改进,并对额定转速为12 000r/min的高速永磁同步电机进行验证,实现电机转速和转子位置实时跟踪。文献[12]提出一种模糊PI模型参考自适应观测器,实现额定转速为30 000r/min的高速磁悬浮永磁电机转子位置检测。文献[13]对额定转速为20 000r/min的高速永磁同步电机进行滑模变结构控制,辨识永磁电机的参数与转速。文献[14]提出基于虚拟旋转坐标与状态观测器结合的无传感器控制方法,对额定转速为27 000r/min的永磁同步电机进行研究。文献[15]提出电流环误差修正的方法,对额定转速为24 000r/min的高速永磁同步电机进行转子位置校正控制。
本文介绍高速磁悬浮永磁电机控制NPC三电平调制方式以及中点电压不平衡控制方法,研究基于滑模速度观测器的高速磁悬浮永磁电机无速度控制方式。最后对所提控制方法进行现场应用。
1 NPC三电平调制方式及中点电压不平衡控制
图1为基于NPC三电平变换器的高速磁悬浮永磁电机拓扑结构。对于NPC三电平变换器的a、b、c三相,每相都包含4个功率开关器件IGBT、4个续流二极管,以及两个钳位二极管。另外,直流侧电容的中点与每相串联二极管的中点相连。NPC三电平变换器的负载接高速磁悬浮永磁电机。
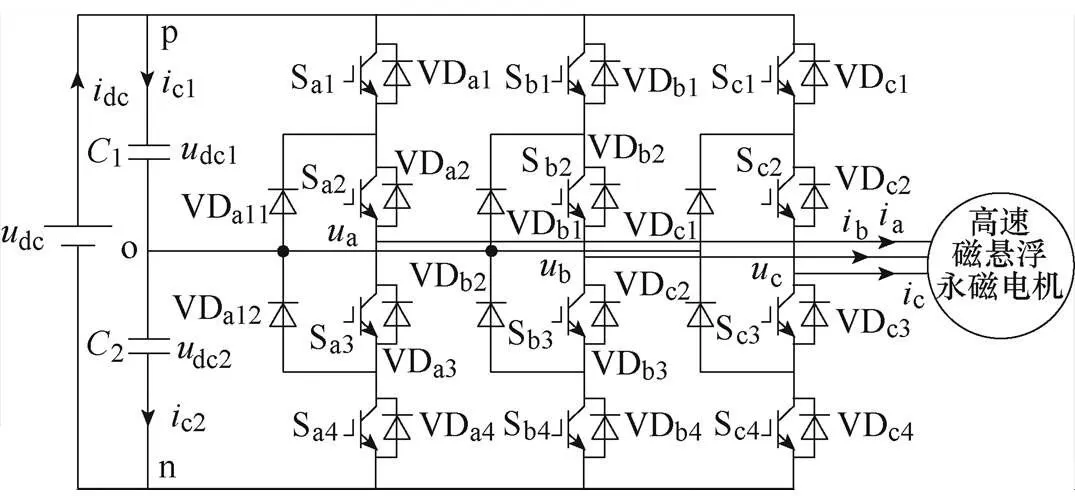
图1 基于NPC三电平变换器的高速磁悬浮永磁电机拓扑
GH坐标系下,NPC三电平空间矢量如图2所示。
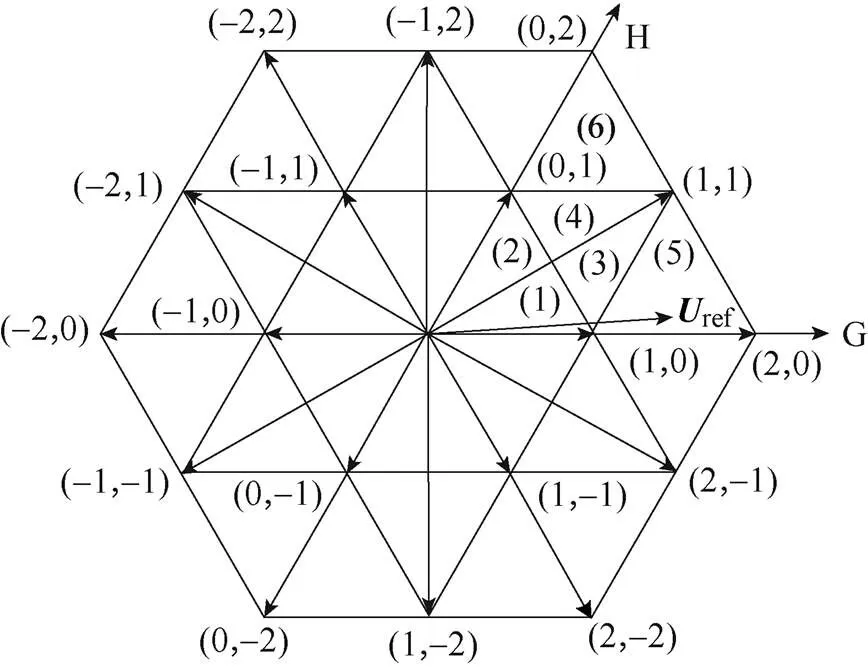
图2 GH坐标系下NPC三电平空间矢量
设三相正弦电压的瞬时值在abc三相静止坐标系中的表达式为
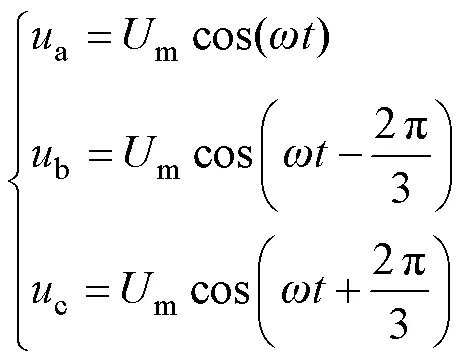



通过改变调节因子的比例系数f,进而自动调节作用因子,实现短矢量作用时间的自动调整,最终实现NPC三电平变换器直流侧上下桥臂电容的电压均衡。
2 高速磁悬浮永磁电机无速度传感器控制
采用滑模观测器算法(Sliding Mode Observer, SMO)对高速磁悬浮永磁电机进行无速度传感器控制,并对SMO控制原理进行介绍。
永磁电机定子电流方程为
利用式(10)~式(12),计算电流观测误差为
定义滑模面函数为
构建Lyapunov函数为

对式(15)求导可得
利用反正切函数获取转子位置估算信息,有
高速磁悬浮永磁电机控制控制框图如图3所示,其控制拓扑采用NPC三电平拓扑,NPC三电平变换器的调制方式采用三电平SVPWM方式,并具有中点电压平衡控制算法。高速磁悬浮永磁电机无速度控制,利用SMO对永磁电机进行无速度传感器矢量控制,采集永磁电机三相定子电压及电流,并利用SMO算法获取电机的转速以及转子位置角。根据SMO估算出的转速与转子位置角,进行电机低频与高频切换。
图3 高速磁悬浮永磁电机NPC三电平控制框图
Fig.3 NPC three-level converter NPC three level control block diagram of high speed maglev permanent magnet motor
3 高速磁悬浮永磁电机稳定控制仿真验证
在Matlab/Simulink中搭建高速磁悬浮永磁电机NPC三电平控制仿真模型,仿真参数见表1。
图4为NPC三电平变换器上下桥臂电容电压中点平衡控制仿真结果,在0~1.0s内未采用中点电压平衡算法,上下桥臂电压不平衡趋势变大。在1.0s时,加入中点电压平衡算法,上下桥臂电压达到平衡状态。
当给定转速为1 200r/min,图5为采用饱和函数sat()时永磁电机实际转速与估算转速的仿真结果,永磁电机的实际转速能够很好地跟踪给定转速,估算的转速维持在1 200r/min左右,上下波动范围约为5r/min。
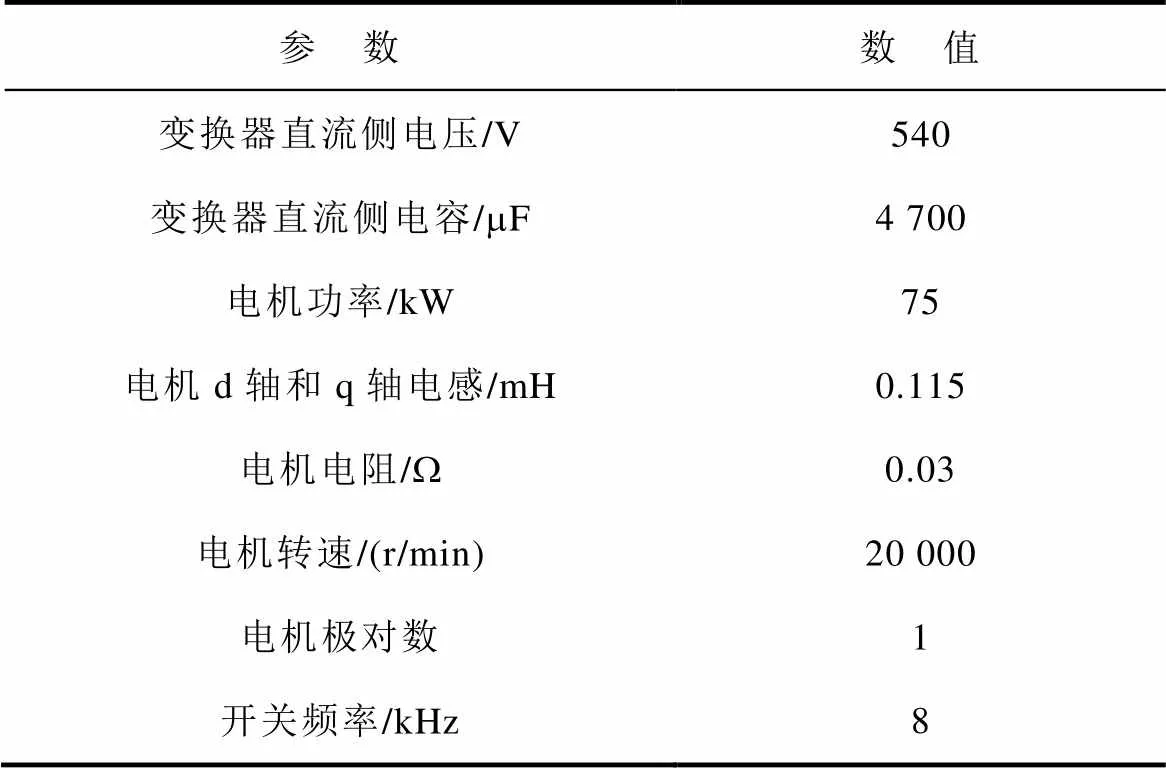
表1 高速磁悬浮永磁电机NPC三电平控制仿真参数

图4 NPC三电平变换器上下桥臂电容电压平衡控制仿真结果
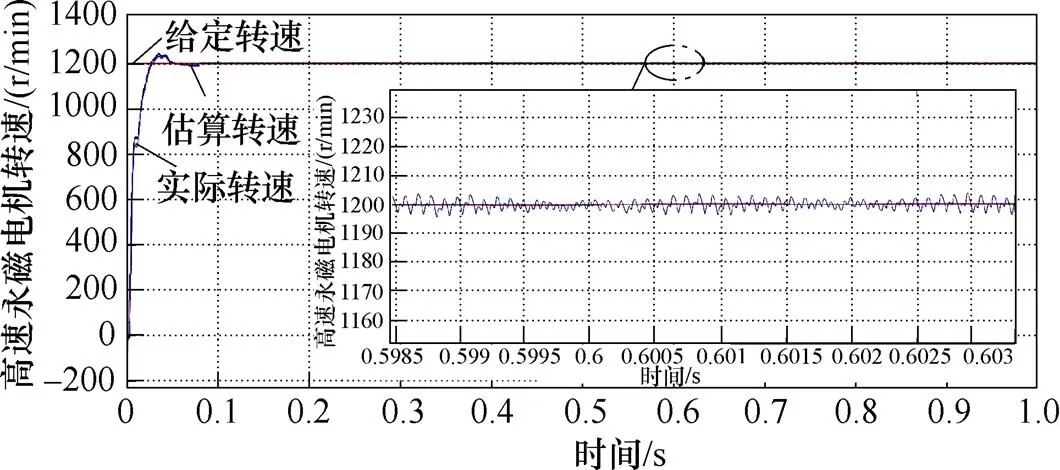
图5 给定转速1 200r/min时滑模观测器仿真结果
图6为高速磁悬浮永磁电机转速仿真结果,电机实现转速为20 000r/min状态运行。
4 高速磁悬浮永磁电机稳定控制实验验证
图7为高速磁悬浮永磁电机NPC三电平控制系统硬件结构,包含380V交流电源、不控整流桥、直流侧电容、NPC三电平变换器以及负载。380V交流电压接入不控整流桥得到540V直流电压,NPC三电平变换器的直流侧与不控整流桥的直流侧相连,交流侧接高速磁悬浮永磁电机。
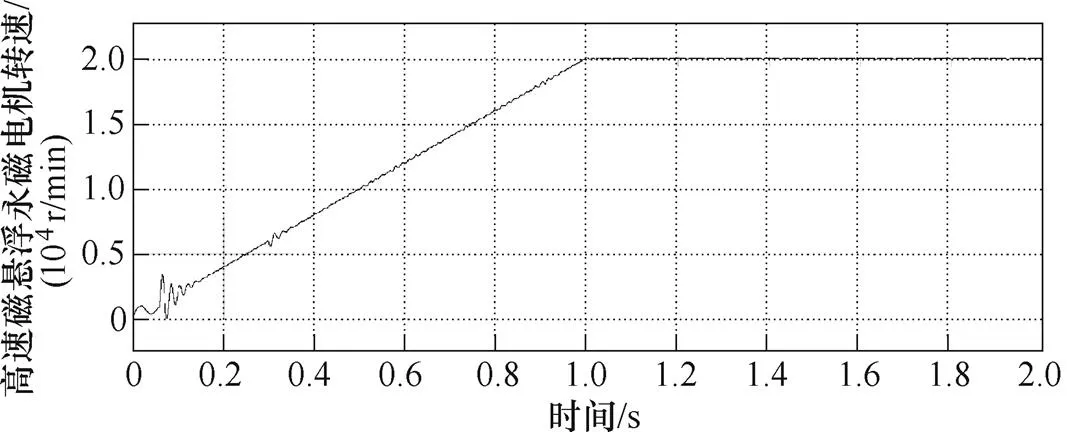
图6 高速磁悬浮永磁电机转速仿真结果
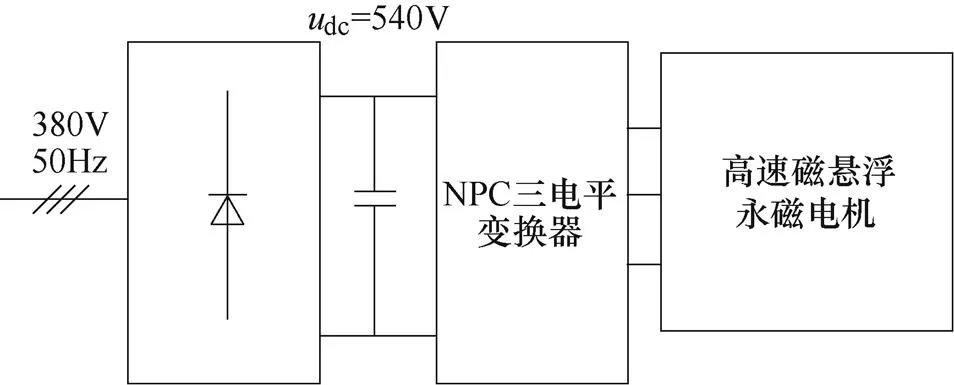
图7 高速磁悬浮永磁电机NPC三电平控制系统硬件结构
图8为现场安装,包括功率变换器、磁悬浮系统控制器、高速磁悬浮永磁电机等,完成电机调速实验验证。
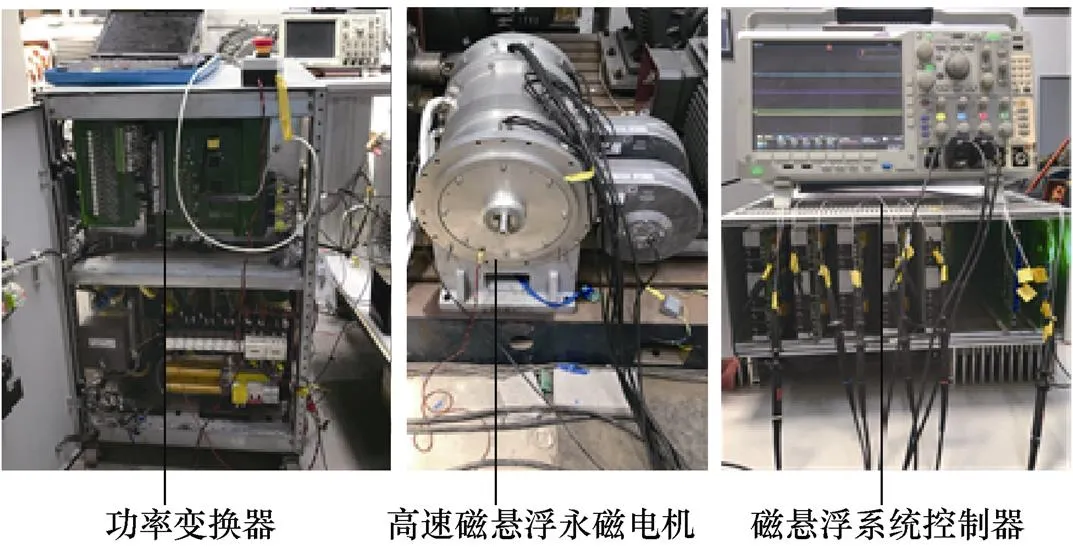
图8 高速磁悬浮永磁电机NPC三电平控制现场安装
进行基于GH坐标系的NPC三电平高频控制的相关实验,采用NPC三电平中点电压平衡控制算法,以直流侧电压310V、交流侧输出频率330Hz为例,NPC三电平变换器直流侧中点电压实验结果如图9所示,采用中点电压平衡控制算法能够实现NPC三电平变换器上下桥臂电容电压平衡。
基于滑模观测器的无速度传感器控制,在永磁电机0~20Hz运行阶段采用开环控制,并进行电机转速与转子位置角辨识,选择在20Hz时实现从开环控制到转速闭环的阶段过渡。图10为20Hz时高速磁悬浮永磁电机空载时电机转速与转子位置角实验波形,图10a为20Hz时电机转速与转子位置角的给定值,图10b为20Hz时电机转速与转子位置角的估算值,此时给定转速为1 200r/min,电机实际转速为1 197r/min。实验结果与仿真结果基本一致,基于滑模控制的无速度传感器控制能够实现很好的转速辨识。
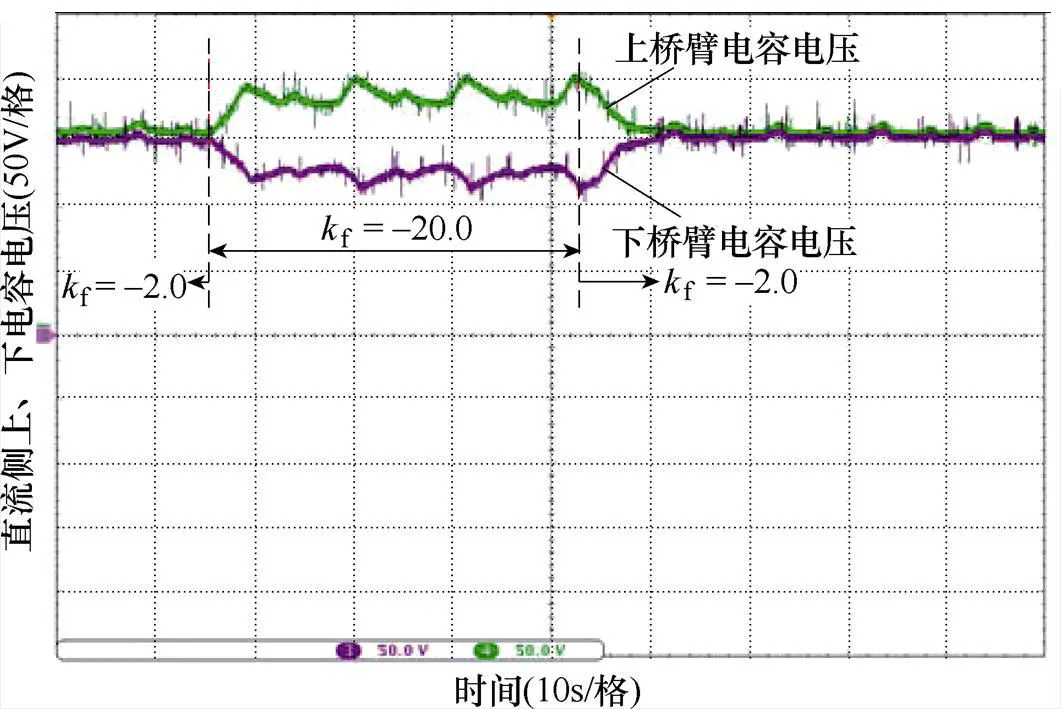
图9 频率330Hz时NPC三电平变换器中点电压平衡实验结果
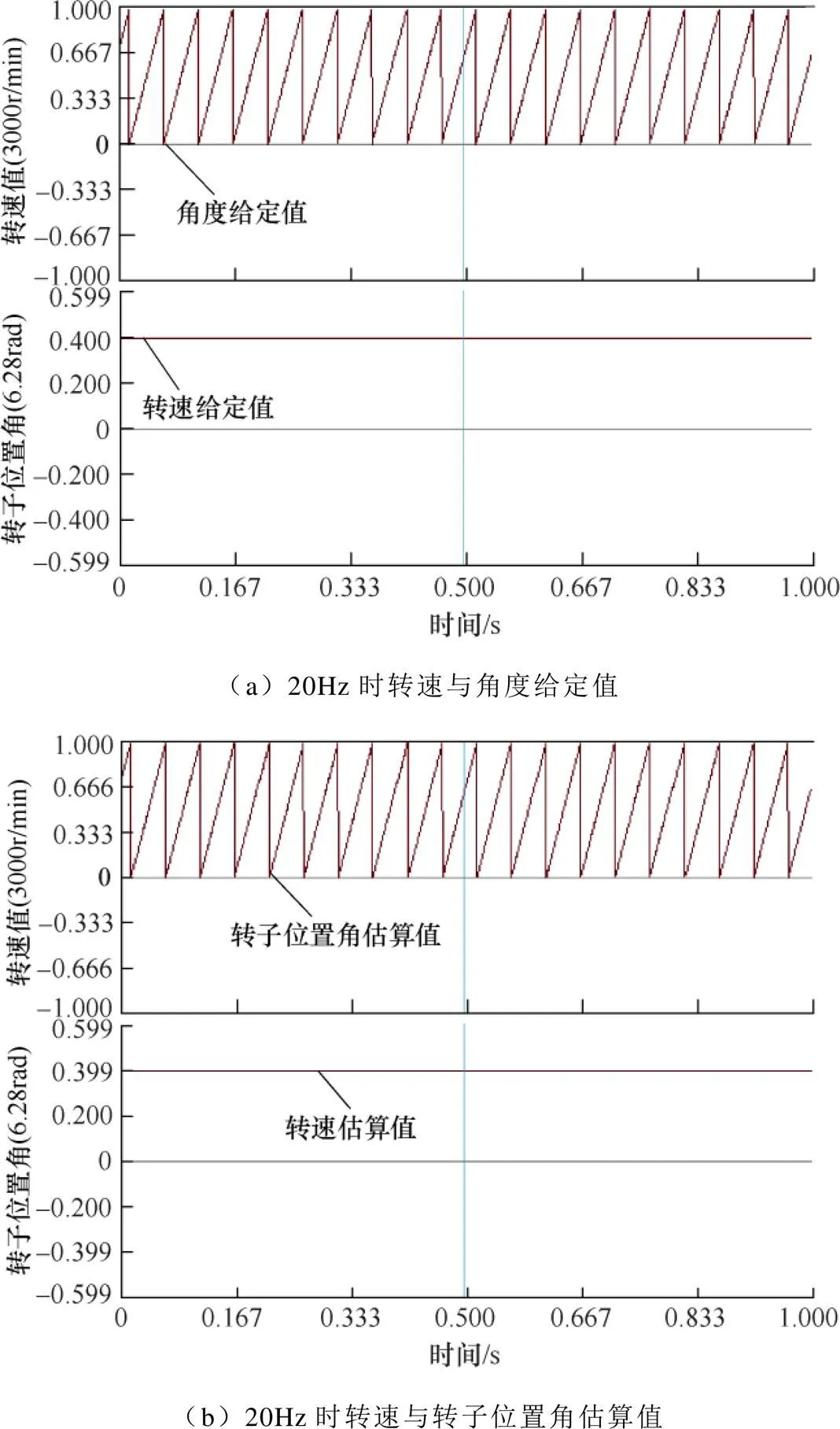
图10 高速磁悬浮永磁电机20Hz运行结果


图11 高速磁悬浮永磁电机定位起动空载实验结果
图12为高速磁悬浮永磁电机现场高频运行实验结果,采集NPC三电平变换器交流输出侧AB线电压与高速磁悬浮电机三相相电流实验结果。图12a为20Hz时相关实验结果,此时电机实际转速为1 200r/min,实际转速跟踪给定转速为1 200r/min,该频率为开环控制与无速度传感器控制的切换频率。图12b为电机实际转速为20 000r/min时相关实验结果,此时电机给定转速为20 040r/min。磁悬浮永磁电机高速运行时,线电压波形呈现五电平结构,输出波形更近似于正弦波。随着频率的升高,线电压呈现上升趋势。
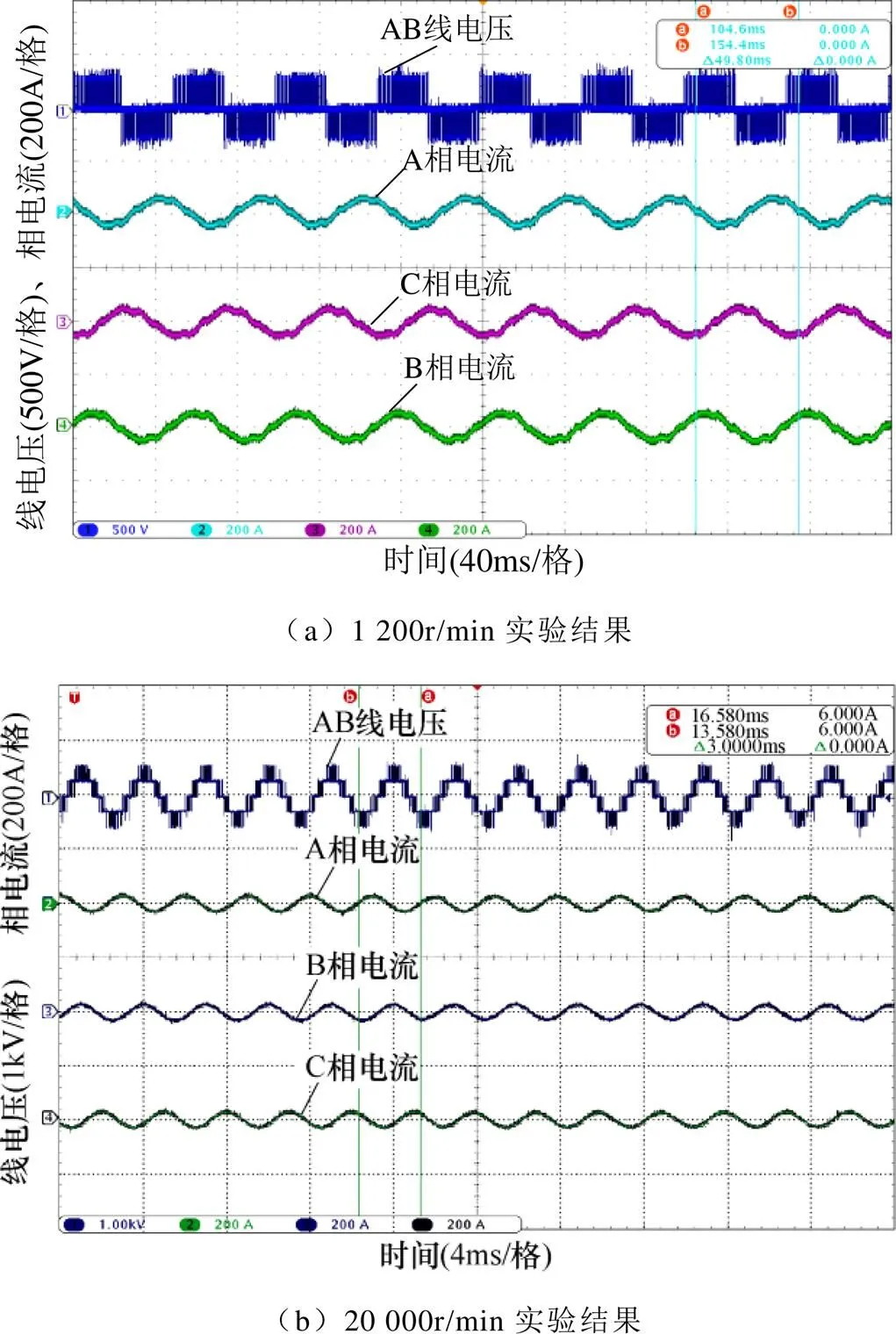
图12 高速磁悬浮永磁电机现场运行结果
5 结论
高基波频率运行状态下的功率变换器和高速永磁电机控制是高速磁悬浮永磁电机研究的关键技术之一。为了实现高速磁悬浮永磁电机稳定运行,从功率变换器控制和高速磁悬浮永磁电机无速度传感器控制两个角度进行研究。为了解决高频状态下NPC三电平变换器中点电容不平衡问题,采用基于比例调节因子的中点不平衡控制方法。功率变换器的稳定运行为磁悬浮永磁电机高速运行提供了保障。采用基于滑模观测器的无速度控制方法,实现高基波频率高载波频率下的转速辨识,实现磁悬浮永磁电机在高频旋转磁场下的稳定运行。最后,将高速磁悬浮永磁电机控制技术进行现场应用,验证了所提控制方法的可行性。
[1] 张凤阁, 杜光辉, 王天煜, 等. 1.12MW高速永磁电机多物理场综合设计[J]. 电工技术学报, 2015, 30(12): 171-180.
Zhang Fengge, Du Guanghui, Wang Tianyu, et al. Integrated design of 1.12MW high speed PM machine based on multi-physics fields[J]. Transactions of China Electrotechnical Society, 2015, 30(12): 171- 180.
[2] 杜光辉, 黄娜, 张凤阁, 等. 大功率高速永磁电机柔性转子系统模态分析[J]. 电工技术学报, 2017, 32(22): 101-107.
Du Guanghui, Huang Na, Zhang Fengge, et al. Modal analysis of the flexible rotor system for high-power high-speed permanent magnet machine[J]. Transa- ctions of China Electrotechnical Society, 2017, 32(22):101-107.
[3] 王天煜, 温福强, 张凤阁, 等. 兆瓦级高速永磁电机转子多场耦合强度分析[J]. 电工技术学报, 2018, 33(19): 4508-4516.
Wang Tianyu, Wen Fuqiang, Zhang Fengge, et al. Analysis of multi-field coupling strength for MW high-speed permanent magnet machine[J]. Transa- ctions of China Electrotechnical Society, 2018, 33(19): 4508-4516.
[4] 田拥胜, 孙岩桦, 虞烈. 高速永磁电机电磁轴承转子系统的动力学及实验研究[J]. 中国电机工程学报, 2012, 32(9): 116-123, 18.
Tian Yongsheng, Sun Yanhua, Yu Lie. Dynamical and experimental researches of active magnetic bearing rotor systems for high-speed PM machines[J]. Pro- ceedings of the CSEE, 2012, 32(9): 116-123, 18.
[5] 于吉坤, 李立毅, 陈启明, 等. 高速永磁同步电机线圈与绕组电枢磁场计算方法及其内在联系[J]. 电工技术学报, 2017, 32(12): 185-196.
Yu Jikun, Li Liyi, Chen Qiming, et al. Calculation method and its internal connection of coil and winding armature magnetic field in high speed permanent magnet synchronous motors[J]. Transa- ctions of China Electrotechnical Society, 2017, 32(12): 185-196.
[6] 佟文明, 孙静阳, 吴胜男. 全封闭高速永磁电机转子结构对转子散热的影响[J]. 电工技术学报, 2017, 32(22): 91-100.
Tong Wenming, Sun Jingyang, Wu Shengnan. Effect of rotor structure on rotor dissipation for totally- enclosed high-speed permanent magnet motor[J]. Transactions of China Electrotechnical Society, 2017, 32(22): 91-100.
[7] 刘威, 陈进华, 张驰, 等. 考虑轴间填充物的高速永磁电机转子强度分析[J]. 电工技术学报, 2018, 33(5): 1024-1031.
Liu Wei, Chen Jinhua, Zhang Chi, et al. Strength analysis of high speed permanent magnet machine rotor with inter-shaft filling[J]. Transactions of China Electrotechnical Society, 2018, 33(5): 1024-1031.
[8] 孙权贵, 邓智泉, 张忠明. 基于齿槽效应的高速永磁电机转子涡流损耗解析计算[J]. 电工技术学报, 2018, 33(9): 1994-2004.
Sun Quangui, Deng Zhiquan, Zhang Zhongming. Analytical calculation of rotor eddy current losses in high speed permanent magnet machines accounting for influence of slot opening[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 1994- 2004.
[9] 李志, 苏振中, 胡靖华, 等. 磁轴承复合位移传感设计与实验研究[J]. 电工技术学报, 2021, 36(7): 1425-1433.
Li Zhi, Su Zhenzhong, Hu Jinghua, et al. Design and experimental research of magnetic bearing compound displacement sensor[J]. Transactions of China Elec- trotechnical Society, 2021, 36(7): 1425-1433.
[10] 周天豪, 杨智, 祝长生, 等. 电磁轴承高速电机转子系统的内模-PID 控制[J]. 电工技术学报, 2020, 35(16): 3414-3425.
Zhou Tianhao, Yang Zhi, Zhu Changsheng, et al. Internal model control-PID control of an active magnetic bearing high-speed motor rotor system [J]. Transactions of China Electrotechnical Society, 2020, 35(16): 3414-3425.
[11] 马河涛, 黄守道. 基于磁链观测的高速永磁同步电机控制方法研究[J]. 电机与控制应用, 2019, 46(6): 21-26.
Ma Hetao, Huang Shoudao. Research on high-speed permanent magnet synchronous motor control method based on flux linkage observation[J]. Electric Machines & Control Application, 2019, 46(6): 21-26.
[12] 张洪帅, 王平, 韩邦成. 基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J]. 中国电机工程学报, 2014, 34(12): 1889-1896.
Zhang Hongshuai, Wang Ping, Han Bangcheng. Rotor position measurement for high-speed permanent magnet synchronous motors based on fuzzy PI MRAS[J]. Proceedings of the CSEE, 2014, 34(12): 1889- 1896.
[13] 张晓光, 姜云蜂, 赵克, 等. 高速永磁同步电机滑模变结构一体化解耦控制[J]. 电力自动化设备, 2013, 33(6): 58-63.
Zhang Xiaoguang, Jiang Yunfeng, Zhao Ke, et al. Sliding-mode variable-structure control of high-speed PMSM based on precision linearization control[J]. Electric Power Automation Equipment, 2013, 33(6): 58-63.
[14] 纪历, 徐龙祥. 高速永磁同步电机无传感器控制[J]. 电机与控制学报, 2011, 15(9): 24-30.
Ji Li, Xu Longxiang. Sensorless control of high speed permanent magnet synchronous motor[J]. Electric Machines and Control, 2011, 15(9): 24-30.
[15] 黄科元, 高丽真, 黄守道, 等. 基于电流环误差修正的高速永磁同步电机转子位置校正方法[J]. 中国电机工程学报, 2017, 37(8): 2391-2398.
Huang Keyuan, Gao Lizhen, Huang Shoudao, et al. A correction method of rotor positions for high speed permanent magnet synchronous motor based on the error correction of the current loop[J]. Proceedings of the CSEE, 2017, 37(8): 2391-2398.
Three-Level Sensorless Control of High Speed Maglev Permanent Magnet Motor
1,22
(1. Institute of Logistics Science and Engineering Shanghai Maritime University Shanghai 201306 China 2. Key Laboratory of Control of Power Transmission and Conversion (SJTU) Ministry of Education Shanghai 200240 China)
Aiming at the neutral point voltage imbalance in NPC three-level converter at high frequency, a three-level modulation based on GH coordinate system and a neutral point voltage balance control based on proportional adjustment factor are adopted. Regarding the speed identification and high-speed stable operation of high-speed magnetic levitation permanent magnet motor in high-frequency state, the sensorless control strategy of magnetic levitation permanent magnet motor suitable for high-speed rotating magnetic field is adopted. The proposed control method is verified by simulation and applied in the field. The experimental results show that the proposed control method can realize the rotor position positioning and low-speed starting control of high-speed permanent magnet motor without position sensor, and achieve high-speed and stable operation. The proposed control method has good practical application value.
High speed maglev motor, NPC three-level converter, neutral point voltage balance, sensorless control
TM46
10.19595/j.cnki.1000-6753.tces.210665
电力传输与功率变换控制教育部重点实验室开放课题(2022AC01)资助。
2021-05-13
2021-11-24
张 丹 男,1989年生,讲师,研究方向为高速永磁电机控制。
E-mail: zhangdan@shmtu.edu.cn(通信作者)
姜建国 男,1956年生,教授,研究方向为大功率永磁电机控制。
E-mail: jiang@sjtu.edu.cn
(编辑 崔文静)